一种全向型水下机器人
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及海洋工程、海底资源开发技术领域,特别是涉及一种全向型水下机器人。
背景技术
海洋工程是指以开发、利用、保护、恢复海洋资源为目的,并且工程主体位于海岸线向海一侧的新建、改建、扩建工程。一般认为海洋工程的主要内容可分为资源开发技术与装备设施技术两大部分,具体包括:围填海、海上堤坝工程,人工岛、海上和海底物资储藏设施、跨海桥梁、海底隧道工程,海底管道、海底电(光)缆工程,海洋矿产资源勘探开发及其附属工程,海上潮汐电站、波浪电站、温差电站等海洋能源开发利用工程,大型海水养殖场、人工鱼礁工程,盐田、海水淡化等海水综合利用工程,海上娱乐及运动、景观开发工程,以及国家海洋主管部门会同国务院环境保护主管部门规定的其他海洋工程。
受海底恶劣环境限制,深海大型海洋工程主要依靠水下作业机器人来进行工作,但传统的开架式水下机器人主要为观测功能,而作业级水下机器人目前大多将水下推进器固定在机器人本身的框架上,这并不能充分有效地利用推进器,这不仅降低了推进器的工作效率,耗能大,还限制了机器人的灵活度,且无法根据海底洋流方向来调试推进器最佳方向,严重制约海洋工程的可持续性发展,损害水下机器人安全。
针对当前固定式推进器所带来的电能损耗浪费和经济损失,在对国内相关论文专利进行深入调查学习后,国内已有的全向型水下机器人设计仅有由河海大学机电工程学院发表的论文《碟型四螺旋桨全向水下机器人的设计》。但因其自由度低,仅存在于理论当中,且存在一系列的难以控制的问题,不能广泛地应用到工业技术当中。因此,目前亟需一种新型的全向型水下机器人,以解决传统开架式水下机器人能耗高,自由度低,灵活性差,智能化水平低的技术问题。
发明内容
本发明的目的是提供一种全向型水下机器人,以解决上述现有技术存在的问题,规避传统作业级水下机器人高能耗,低自由度的缺点,提高水下机器人的行进效率,机器人自身安全以及水下机器人智能化水平。
为实现上述目的,本发明提供了如下方案:本发明提供一种全向型水下机器人,包括:开架式机器人,所述开架式机器人包括框架,所述框架顶端的四角处均设有顶部推进器;机械臂,所述机械臂设置于所述框架的前端;旋转云台,所述旋转云台设置于所述框架内,所述旋转云台包括由上而下依次固接的电机固定板、轴承上固定板和轴承下固定板,所述轴承上固定板和所述轴承下固定板之间固定有圆柱滚子轴承,所述圆柱滚子轴承的内缘由上而下依次设有两个轴承夹内板,两个所述轴承夹内板之间固接,且所述轴承夹内板的外缘与所述圆柱滚子轴承的内缘之间过盈配合,所述电机固定板上固定有伺服电机,位于顶部的所述轴承夹内板与所述伺服电机的输出轴固接,位于底部的所述轴承夹内板的底端固接有舵机固定板,所述舵机固定板的顶端设有若干全防水舵机,所述全防水舵机安装有水下推进器,所述水下推进器均布于所述舵机固定板的底端。
优选的,所述框架的上下两端分别固定有铝合金上板和铝合金下板,所述框架包括固定在所述铝合金上板和铝合金下板之间的若干铝型材,若干所述铝型材之间通过连接角码固接。
优选的,若干所述顶部推进器固定安装于所述铝合金上板的顶端四角处。
优选的,所述电机固定板通过若干六角螺栓与所述铝合金上板固定。
优选的,所述电机固定板与所述轴承上固定板、所述轴承上固定板与所述轴承下固定板之间分别通过若干六角螺栓固定,两个所述轴承夹内板之间通过若干铜柱固定。
优选的,所述伺服电机通过电机加强垫与所述电机固定板固接,所述伺服电机的输出轴通过连接法兰与所述轴承夹内板固接。
优选的,所述舵机固定板通过若干铜柱与所述轴承夹内板固接,所述全防水舵机通过连接法兰固定有推进器夹具,所述水下推进器安装于所述推进器夹具内。
优选的,所述水下推进器的数量为四个,且四个所述水下推进器均布于所述舵机固定板底面的四周。
优选的,所述水下推进器的底端设有若干间隔顺序排列的耐压舱,所述耐压舱位于所述铝合金下板的顶部,所述耐压舱固定于所述框架上,所述耐压舱内放置有高清摄像头和控制电路板。
优选的,所述框架的前端固定有若干水下探照灯。
本发明公开了以下技术效果:与现有的作业级水下机器人相比,本发明提供的一种全向型水下机器人,可实现性高,运行安全可靠,便携程度高,可搭载性强,结构简单,能够提供可靠的性能改进,达到节能减排的效果。其水下推进器可以绕自身轴旋转,可在行进方向提供最佳驱动力,有效补偿电流和电缆阻力。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
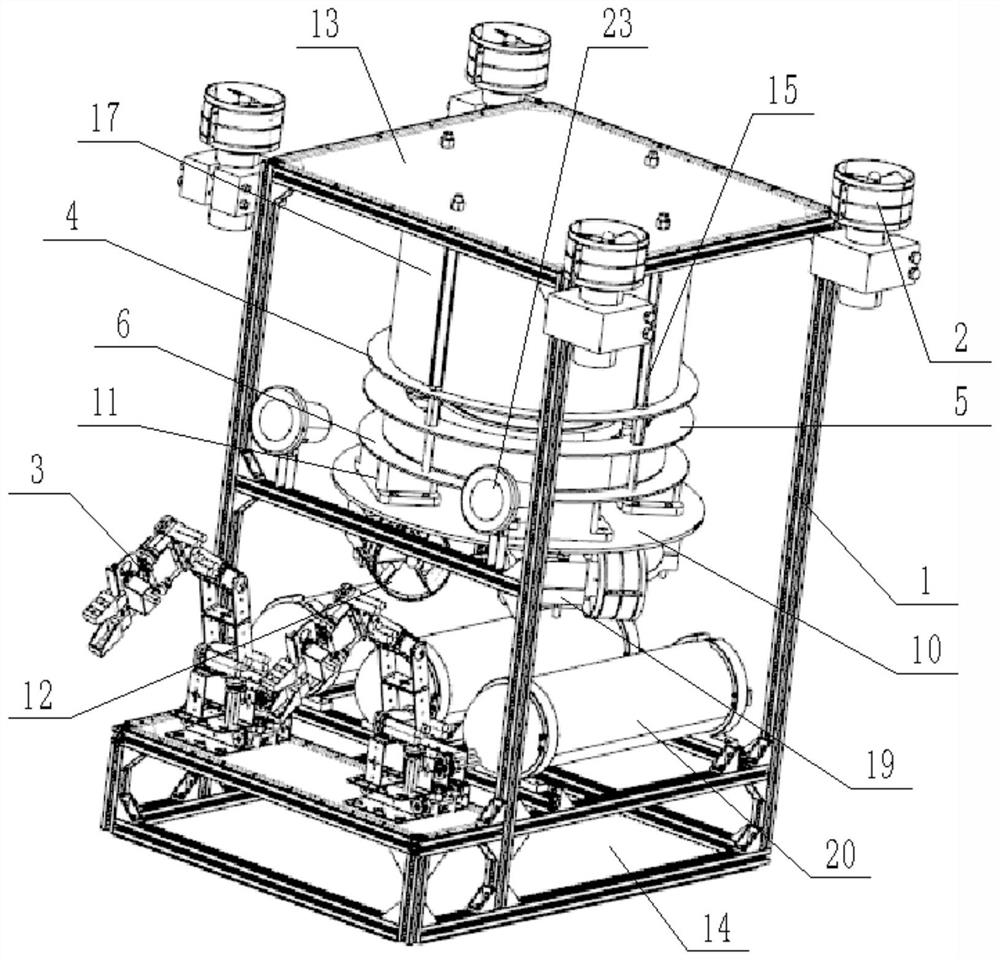
图1为本发明全向型水下机器人的结构示意图;
图2为本发明旋转云台的结构示意图;
图3为本发明圆柱滚子轴承的结构示意图;
图4为本发明舵机固定板的结构示意图;
图5为本发明耐压舱的结构示意图;
图6示出了实施例中水下推进器位置及受力状态;
图7示出了实施例中传统水下机器人与本发明的行进路线;
其中,1为框架,101为铝型材,102为连接角码,2为顶部推进器,3为机械臂,4为电机固定板,5为轴承上固定板,6为轴承下固定板,7为圆柱滚子轴承,8为轴承夹内板,9为伺服电机,10为舵机固定板,11为全防水舵机,12为水下推进器,13为铝合金上板,14为铝合金下板,15为六角螺栓,16为铜柱,17为电机加强垫,18为连接法兰,19为推进器夹具,20为耐压舱,21为高清摄像头,22为控制电路板,23为水下探照灯。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
参照图1-5,本发明应用于海洋工程、海底资源开发技术领域,在对国内相关技术进行深入研究后,为解决传统开架式水下机器人能耗高,自由度低,灵活性差,智能化水平低的缺点,提出一种全向型水下机器人,用于解决作业级水下机器人高能耗,低自由度,提高水下机器人的行进效率,机器人自身安全以及水下机器人智能化水平,具体的包括:开架式机器人,开架式机器人包括框架1,框架1顶端的四角处均设有顶部推进器2;机械臂3,机械臂3设置于框架1的前端,框架1的前端设置有机械臂固定板,机械臂3固定于机械臂固定板上,机械臂3自身主要由全防水舵机11以及U形连接件(图中未标出)组成;旋转云台,旋转云台设置于框架1内,旋转云台包括由上而下依次固接的电机固定板4、轴承上固定板5和轴承下固定板6,轴承上固定板5和轴承下固定板6之间固定有圆柱滚子轴承7,圆柱滚子轴承7的内缘由上而下依次设有两个轴承夹内板8,两个轴承夹内板8之间固接,且轴承夹内板8的外缘与圆柱滚子轴承7的内缘之间过盈配合,旋转云台主要通过四根六角螺栓15将电机固定板4、轴承上固定板5和轴承下固定板6固定连接起来,搭建出云台的基本结构,并在轴承上固定板5和轴承下固定板6间固定一个圆柱滚子轴承7。而上下两块轴承夹内板8通过四根铜柱16固定连接在一起,并与圆柱滚子轴承7过盈配合,形成中空旋转平台,电机固定板4上固定有伺服电机9,位于顶部的轴承夹内板8与伺服电机9的输出轴固接,位于底部的轴承夹内板8的底端固接有舵机固定板10,舵机固定板10的顶端设有若干全防水舵机11,全防水舵机11安装有水下推进器12,水下推进器12均布于舵机固定板10的底端,本实施例中水下推进器12的数量优选为四个。通过由伺服电机9的驱动实现中空旋转平台的一级旋转,进而实现仅由伺服电机9可完全控制四个水下推进器12的摆放方向,舵机固定板10则通过四根铜柱16来与轴承夹内板8固定连接,同时固定安装四个全防水舵机11,四个全防水舵机11则各自通过连接法兰与推进器夹具19固定,从而实现四个水下推进器12的任意角度摆放,形成二级旋转。当机器人在水下遭遇洋流冲击时,机器人可通过mpu6050姿态传感器,实时感知机器人的平衡状态,并将状态信息上传至上位机,上位机处理状态信息后将采用一级旋转或二级旋转、旋转角度和水下推进器12的旋转角度等参数信息通过电缆输送给水下机器人,进而控制水下推进器12的摆放方向和角度,有效减少洋流冲击带来的影响。
进一步优化方案,框架1的上下两端分别固定有铝合金上板13和铝合金下板14,框架1包括固定在铝合金上板13和铝合金下板14之间的若干铝型材101,若干铝型材101之间通过连接角码102固接,若干顶部推进器2固定安装于铝合金上板13的顶端四角处,本实施例优选顶部推进器2的数量为四个。开架式机器人通过连接角码102连接铝型材101,搭建机器人的整体框架结构,并通过上下两块铝合金上板13和铝合金下板14加强固定机器人的整体框架结构强度和刚度,通过在上方固定四个顶部推进器2,实现机器人的上升和下潜功能。
进一步优化方案,电机固定板4通过若干六角螺栓15与铝合金上板13固定,实现旋转云台与开架式机器人之间的固定。
进一步优化方案,电机固定板4与轴承上固定板5、轴承上固定板5与轴承下固定板6之间分别通过若干六角螺栓15固定,构成中空的旋转云台基本框架,两个轴承夹内板8之间通过若干铜柱16固定,使得伺服电机9可同步带动两个轴承夹内板8旋转。
进一步优化方案,伺服电机9通过电机加强垫17与电机固定板4固接,伺服电机9的输出轴通过连接法兰18与轴承夹内板8固接,顶部的伺服电机9通过电机加强垫17与旋转平台固定连接在一起,伺服电机9旋转轴则通过连接法兰18与轴承夹内板8固定连接,通过由伺服电机9的驱动实现中空旋转平台的一级旋转,进而实现仅由伺服电机9可完全控制四个水下推进器12的摆放方向。
进一步优化方案,舵机固定板10通过若干铜柱16与轴承夹内板8固接,全防水舵机11通过连接法兰18固定有推进器夹具19,水下推进器12安装于推进器夹具19内,实现四个水下推进器12的任意角度摆放,形成二级旋转。
进一步优化方案,水下推进器12的数量为四个,且四个水下推进器12均布于舵机固定板10底面的四周。
进一步优化方案,水下推进器12的底端设有若干间隔顺序排列的耐压舱20,耐压舱20位于铝合金下板14的顶部,耐压舱20固定于框架1上,耐压舱20内放置有高清摄像头21和控制电路板22,通过耐压舱20来存放水下高清摄像头21和控制电路板22等电子控制元件。
进一步优化方案,框架1的前端固定有若干水下探照灯23,通过水下探照灯23来为机器人在水下提供照明。
在节能方面,无论推进器的摆放位置如何摆放,总会有分力互相抵消,降低了推进器的使用功率,造成一定的无用功。参照图6,而本发明的全向型水下机器人能根据需求,可在行进方向提供最佳驱动力,所能提供的驱动力也远大于传统水下机器人。
参照图7,从A点到B点,传统的水下机器人需要先进行转艏,再进行直线驱动前行,而本发明的全向型水下机器人则仅需通过伺服电机9转动一定的角度,进而直接实现直线驱动前行。
传统水下机器人做功:W1=W转艏+F(推进器轴向力)*L(AB两点间的位移);
本发明的全向型水下机器人做功:W2=W电(用于驱动伺服电机7)+F(水下推进器12的轴向力)*L(AB两点间的位移);
因为W转艏远大于W电,因此W1远大于W2,同样的位移,显然本发明的全向型水下机器人消耗的电能更少工作效率更高。
在灵活度方面:
从A点到B点,传统水下机器人需经过一个转艏过程才能直线到达B点,而本发明的全向型水下机器人则可通过全防水舵机11或伺服电机9直接改变水下推进器12的方向,进而直接驱动水下推进器12,从而到达B点。
与现有的作业级水下机器人相比,本发明提供的一种全向型水下机器人,可实现性高,运行安全可靠,便携程度高,可搭载性强,结构简单,能够提供可靠的性能改进,达到节能减排的效果。其水下推进器12可以绕自身轴旋转,可在行进方向提供最佳驱动力,有效补偿电流和电缆阻力。
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 一种全向型水下机器人
- 一种用于水下机器人的全向影像结构