新型宽频带、抗冲击张拉振动加速度传感器及使用方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及传感器技术领域,具体地说,涉及一种新型宽频带、抗冲击张拉振动加速度传感器。
背景技术
环境监测是物联网的重要环节之一,而振动广泛存在于我们周围的环境中,传递着重要的信息,因此振动传感的研究十分必要。由于环境中振动是随机、多变的,监测振动信号的传感器面临着响应频带有限的问题,并且无法适应变化的环境,比如振动频率的迁移和突然的冲击。所以关于宽频、抗冲击破坏的振动传感器的研究具有很大的挑战性。
系统的固有频率和系统的刚度以及质量有关,目前机械式拓宽频带是被认为最高效的方法。通过调整系统刚度和改变质量块的质量可以实现系统的固有频率发生迁移,从而达到拓宽频率的效果。通过改变质量块的方法来实现会不可避免地增加整个传感器地尺寸,限制器件的微型化,所以通过改变系统刚度来拓宽频带更符合实际应用。目前存在的很多传感器都需要手动来一步一步根据环境的改变来调整传感器的参数,过程及其繁琐,不符合实际的工作要求。此外,由于环境中存在突变的因素,使得传感器需要满足抗破坏和冲击的要求。现存的解决方案多数采用植入缓冲元件和柔性模块,但是会在一定的程度上影响系统对振动信号的响应。综上,从本质上拓宽器件的工作频带,并且使得传感器件具有抗冲击、破坏的特性是一个挑战。
发明内容
本发明的内容是提供一种新型宽频带、抗冲击张拉振动加速度传感器,其能够解决需要不断手动调节相关物理参数如质量块的质量、弹性部分的刚度等来改变传感器的固有频率的弊端。
根据本发明的一种新型宽频带、抗冲击张拉振动加速度传感器,其包括基本骨架、预应力调节模块和摩擦电摩擦块,基本骨架位于一外壳内,基本骨架包括顶部质量块、基底、四根外弦和四根内弦,四根内弦的两端分别连接顶部质量块和基底,四根外弦一端和顶部质量块连接,四根外弦另一端连接有齿轮螺母;
预应力调节模块包括螺栓、齿轮螺母和同步带,螺栓通过胶水固定在基底预留孔内,齿轮螺母和螺栓连接;齿轮螺母和同步带配合实现同步调节每一个齿轮螺母转动的角度;
摩擦电摩擦块包括两块摩擦电极,一块摩擦电极包括依次粘连的水辅助氧化的铝胶带和第一pet薄片;另一块摩擦电极包括依次粘连的第二pet薄片、铜胶带、pi胶带、ptfe薄膜;
两块摩擦电极分别贴在顶部质量块的侧边处和外壳的内侧。
作为优选,顶部质量块和基底均是通过3d打印加工,材料为尼龙玻纤,作为张拉整体结构中的刚性受压部分;四根外弦和四根内弦作为受拉部分,材料为超高分子量聚乙烯。
作为优选,螺栓与齿轮螺母、齿轮螺母与同步带之间通过摩擦运动幅的连接。
作为优选,四根外弦和四根内弦与其他部件的连接均通过胶粘接。
作为优选,外壳与基本骨架通过胶水粘接,螺栓与基底通过胶水粘连。
作为优选,齿轮螺母的数量有四个,四个齿轮螺母的齿轮外廓是与同步带配合的,当外力偶作用在同步带上时,同步带带动四个齿轮螺母同步转动;四个齿轮螺母的同步转动使得四根外弦受到拉力而伸长,保证四根外弦的预应力相同。
本发明还提供了一种新型宽频带、抗冲击张拉振动加速度传感器的使用方法,其采用上述的新型宽频带、抗冲击张拉振动加速度传感器,并包括:
一、齿轮同步调节模式:通过同步带带动四个齿轮螺母同步转动,齿轮螺母的同步转动使得四根外弦受到拉力而伸长,保证四根外弦的预应力相同,进而整个传感器的刚度都会随之发生变化;
二、自由齿轮模式:先调整同步带,确定一个合适初始频率,然后,去掉同步带,再用胶水固定其中三个齿轮螺母,再旋动剩余的一个齿轮螺母至自由的状态。
本发明解决了现有技术中需要重复手动调节相关物理参数如质量块的质量、弹性部分的刚度等来改变传感器的固有频率的弊端,也解决了振动传感器在经过大的加速度冲击后易失效的问题。在同步模式下,调节同步带可以实现传感器的固有频率的迁移,进而可以实现拓宽频带。在自由模式下,可以在不依赖每次手动调节螺栓的情况下,从根本上拓宽传感器的工作频带。此外,在施加高达2.7×10
附图说明
图1为实施例中一种新型宽频带、抗冲击张拉振动加速度传感器的结构示意图;
图2为实施例中一种新型宽频带、抗冲击张拉振动加速度传感器的俯视结构示意图;
图3为实施例中摩擦电模块在振动过程中的工作原理图;
图4为实施例中振动传感器两种工作模式的示意图。
具体实施方式
为进一步了解本发明的内容,结合附图和实施例对本发明作详细描述。应当理解的是,实施例仅仅是对本发明进行解释而并非限定。
实施例
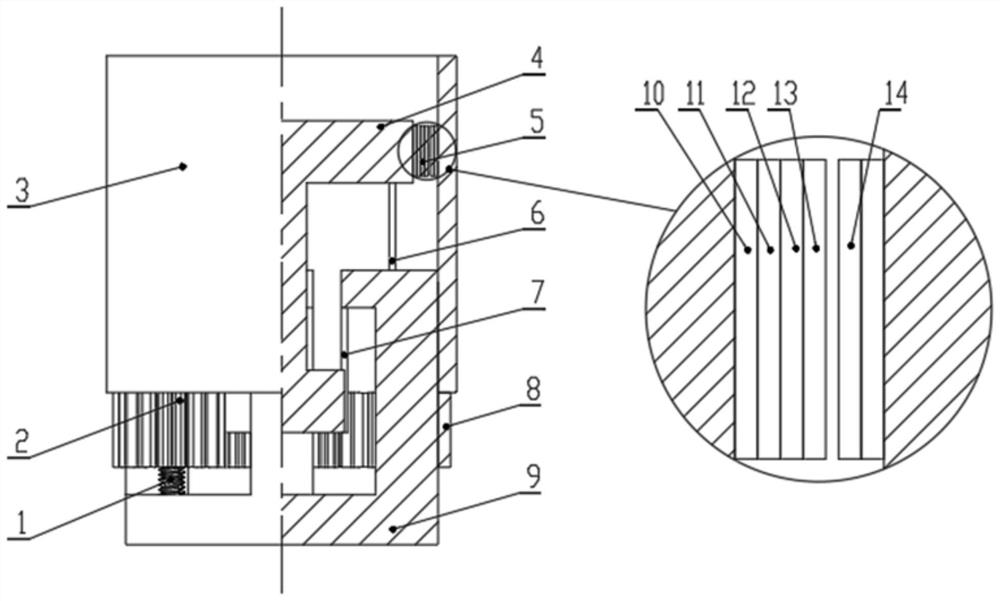
如图1和图2所示,根据本实施例的一种新型宽频带、抗冲击张拉振动加速度传感器,其包括基本骨架、预应力调节模块和摩擦电摩擦块5,顶部质量块4和基底9均是通过3d打印加工,材料为尼龙玻纤,作为张拉整体结构中的刚性受压部分。四根外弦6和四根内弦7作为受拉部分,材料为超高分子量聚乙烯。
基本骨架位于一外壳3内,基本骨架包括顶部质量块4、基底9、四根外弦6和四根内弦7,四根内弦7的两端分别连接顶部质量块4和基底9的规定位置,四根外弦6一端和顶部质量块4连接,四根外弦6另一端与齿轮螺母2的中心连接;
预应力调节模块包括螺栓1、齿轮螺母2和同步带8,螺栓1通过胶水固定在基底9预留孔内,齿轮螺母2和螺栓1连接;齿轮螺母2和同步带8配合实现同步调节每一个齿轮螺母2转动的角度;
摩擦电摩擦块5包括两块摩擦电极,一块摩擦电极包括依次粘连的水辅助氧化的铝胶带14和第一pet薄片;另一块摩擦电极包括依次粘连的第二pet薄片10、铜胶带11、pi胶带12、ptfe(聚四氟乙烯)薄膜13;
两块摩擦电极分别贴在顶部质量块4的侧边处和外壳3的内侧。
传感器工作前的准备:
该传感器包括基本骨架、预应力调节模块和摩擦电模块5,为了有效的形成张拉整体结构,需要保证每个部件的正确连接,保证每个部件都在受力的状态。因此,在连接好基本骨架后,需要手动调整同步带8转动齿轮螺母2,使得整个结构具有初始的预紧。
传感器的各个部件之间的连接:螺栓1与齿轮螺母2、齿轮螺母2与同步带8之间通过摩擦运动幅的连接,四根外弦6和四根内弦7与其他部件的连接均通过胶水粘接,外壳3与基本骨架通过胶水粘接,螺栓1与基底9通过胶水粘连。
传感器的工作原理:
张拉整体的定义为:只受压力的且不能相互连接的刚性部分和只受拉力的绳子构成的连续整体。研究证明张拉整体的固有频率与系统中软弦所受的张力大小有关。此外,传感器达到抗冲击,可以通过在植入缓冲原件实现。在此基础上,张拉整体既有调节固有频率的功能,也包含了绳子作为缓冲原件,因此受张拉整体结构的启发,可以使振动传感器具有宽频带和抗冲击的特点。
器件的电信号是由摩擦电模块5产生的,且为接触分离式的摩擦电模式。采用接触分离式的原因,是因为这种模式可以降低电极表面的磨损,延长传感器的工作寿命。振动信号的基本采集过程如下:需要将传感器安装在振动源处,传感器的安装姿态要顺应振动源的方向,确保顶部质量块4的位移与振动源的方向一致。摩擦电模块5的两块电极分别安装在顶部质量块4的侧边和外壳3的内侧,安装过程注意,两块摩擦电极的大小尺寸一致,间隙适合,并且安装位置要完全对应,以确保在工作过程中实现最大的接触,本实施例中,摩擦电极的尺寸为15mm×20mm,两者之间的间隙为1mm。当振动经过张拉的基本骨架后,传递到顶部质量块4,使其发生往复运动,从而两块摩擦电极处于重复的接触分离状态。电极之间的电势差不断改变,形成了电子移动,通过外部电路完成传递,形成电流。摩擦电的发电原理图如图3所示。此外为了增加其发电性能的表现,对铝胶带14进行水辅助氧化,使其表面具有微结构来增大接触面积,引入pi胶带12作为储电层。
水辅助氧化的过程:将铝胶带14用丙酮和去离子水洗净,风干。在烧杯中加入去离子水,加热至80℃,加入处理干净的铝胶带14,煮40分钟。取出,风干。
传感器的工作模式:
该传感器有两种工作模式如图4所示,分别为齿轮同步调节模式和自由齿轮模式,以下均称之为同步模式和自由模式。其中同步模式是指,四个齿轮螺母2的齿轮外廓是与同步带8配合的,当外力偶作用在同步带8上时,同步带8带动四个齿轮螺母2同步转动。齿轮螺母2的同步转动使得四根外弦6受到拉力而伸长,保证四根外弦6的预应力相同。进而整个结构的刚度都会随之发生变化。根据螺纹齿距和转角可以确定齿轮螺母2向下移动的距离,也即外弦的伸长量。具体关系为
同步模式与自由模式拓宽频率的操作:
同步模式下的传感器的固有频率可以手动调整同步带8实现,根据试验的结果显示,增加弦的预紧可以使得固有频率变大。在实际的过程中,可以根据振动源的频率不断地调节同步带8来让传感器保持最大信号输出状态,一直调节下去,可以在200Hz地宽频范围内,有明显地信号输出。
自由模式,只需先在同步模式的基础上,先调整同步带8,确定一个合适初始频率。然后,去掉同步带8,再用胶水固定其中三个齿轮螺母2,再旋动剩余的一个齿轮螺母2至自由(即不拧紧)的状态。也即同步模式需要一直调节,而自由模式只需调节一步。
本传感器可用于极端环境的振动监测,如高压电线的风振监测,在冰雹撞击后仍能保持稳定的工作状态。通过试验验证,该传感器可以监测不同的风速,以及高压电线故障。并且在冰雹极端天气的模拟实验中,可以承受20m/s的速度的撞击。也可做路况监测,只需要将器件与便携示波器连接,安装在共享单车或者汽车上,即刻监测所行驶道路的路况。试验证明,本设计可以监测出凸起与凹坑的路况。
通过实验证明,在同步模式下,调节同步带可以实现传感器的固有频率的迁移。进而可以实现拓宽频带。在自由模式下,可以在不每次都手动调节螺栓的情况下,从根本上拓宽传感器的工作频带。此外,对传感器进行了冲击试验,在施加高达2.7×10
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种加速度传感器内置于拉索的振动信号采集系统
- 一种预应力钢筋张拉工装及其使用方法
- 一种具有新型张拉索安装结构的预应力张拉装置
- 新型锚索张拉机具及锚索二次张拉系统