位置观测系统以及记录了位置观测程序的记录介质
文献发布时间:2023-06-19 18:32:25
技术领域
实施方式涉及位置观测系统以及记录有位置观测程序的记录介质。
背景技术
铁道车辆中的车体和台车例如通过将设置在车体上的销插入到设置在台车上的销座中而连结。由于车体是高重量的,因此若不能正确地进行销与销座的对位,则在车体与台车的连结时台车有可能破损。以往,销与销座的相对的位置的观测是在作业员的目视之下进行的。该基于目视的观测例如通过作业员从在放置台车的地面上挖出的被称为地坑(pit)的孔通过销座观察销来进行。由于地坑的形成花费成本,所以要求更低成本的观测方法。
发明内容
一个方式的位置观测系统具备传感器、图像生成部和显示控制部。传感器被配置成面对贯通孔中的第一开口部,该贯通孔是具备贯通孔的第一对象物的贯通孔。传感器朝向贯通孔扫描光线,并接收来自第二对象物的光线的反射光,该第二对象物从贯通孔的第二开口部被插入到贯通孔中。图像生成部基于由传感器接收的反射光而生成图像。显示控制部在显示装置上显示图像。
附图说明
图1是表示一个实施方式的位置观测系统的应用例的图。
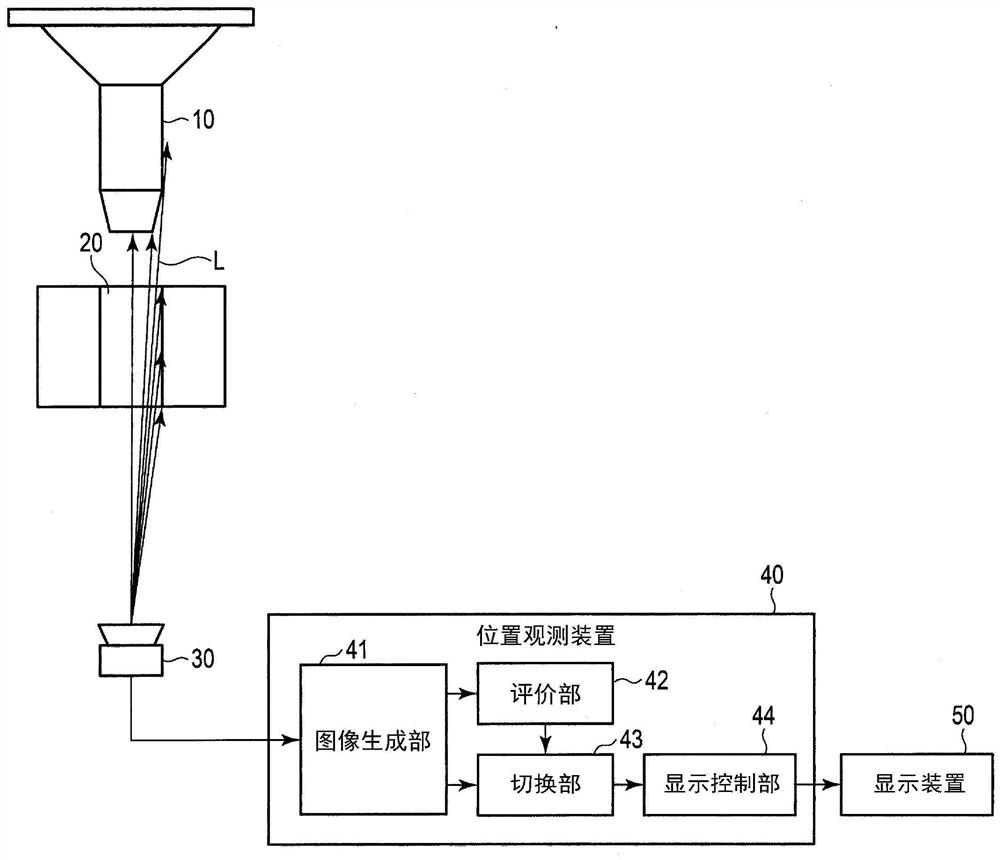
图2是表示实施方式的位置观测系统的结构的图。
图3是表示位置观测装置的硬件结构的一例的图。
图4是表示位置观测装置的动作的流程图。
图5A是表示销与销座之间的水平方向的位置偏移大时的从传感器投射的光线与销的关系的图。
图5B是表示根据图5A的状况得到的红外图像的例子的图。
图6A是表示销与销座之间的水平方向的位置偏移小时的从传感器投射的光线与销的关系的图。
图6B是表示根据图6A的状况得到的红外图像的例子的图。
图7A是在销与销座之间的水平方向的位置偏移小的状态下销与销座接近时的从传感器投射的光线与销的关系的图。
图7B是表示根据图7A的状况得到的红外图像的例子的图。
图8A是表示与销与销座的铅垂方向的位置关系对应的深度图像的变化的图。
图8B是表示与销与销座的铅垂方向的位置关系对应的深度图像的变化的图。
具体实施方式
以下,参照附图对实施方式进行说明。图1是表示一个实施方式的位置观测系统的应用例的图。一个实施方式的位置观测系统例如能够在铁道车辆的车体1与台车2的连结时使用。
车体1通过例如未图示的起重机(crane)升降,以能够在与供台车2配置的地面平行的水平方向以及相对于地面的铅垂方向上移动。在车体1的下部设置有作为第二对象物的例子的销10。销10例如是大致圆柱状的销,在车体1上形成一个以上。销10的截面形状不需要必须是圆形。
台车2固定在地面的规定位置。在台车2上设置有作为第一对象物的例子的销座20。销座20是形成在台车2上的贯通孔。销座20的形状可以根据销10的形状来决定。销座20的截面形状既可以与销10的截面形状相同,也可以不同。例如也可以是,销10的截面形状是圆,销座20的截面形状是椭圆。以下,将销座20的面向地面一侧的开口部记为第一开口部,将面向车体1一侧的开口部记为第二开口部。
在车体1与台车2的连结时,作业员一边通过实施方式的位置观测系统观测销10与销座20的相对位置,一边操作起重机将车体1的销10插入到台车2的销座20。
图2是表示实施方式的位置观测系统的结构的图。位置观测系统具有传感器30和位置观测装置40。
传感器30配置于与各个销座20的第一开口部面对的地面。更详细地说,传感器30配置成受光面的中心位置配置在销座20的贯通孔的中心轴上。传感器30例如可以是LiDAR(Light Detecting and Ranging:光探测与测距)方式的深度相机。LiDAR方式的深度相机例如具有光源、偏转元件和受光元件。光源例如是红外光源,向偏转元件射出红外光线。偏转元件例如具有MEMS(Micro Electro Mechanical Systems:微机电系统)反射镜,通过反射镜的控制而使光线的射出方向变化,从而经由销座20圆锥状地扫描销10。受光元件例如是具有受光面的元件,该受光面二维状地配置有由在红外区域具有灵敏度的光电二极管、SPAD(Single-PhotonAvalanche Diode:单光子雪崩二极管)这样的元件构成的像素。
实施方式中的传感器30从销座20下侧的开口部即第一开口部投射红外光L,并接收从第二开口部射出并由销10反射后的红外光L的反射光。然后,传感器30将基于反射光的传感器数据发送到位置观测装置40。传感器数据例如包括表示反射光的亮度的数据和表示投受光的时间差的数据。
在此,传感器30构成为经由销座20以圆锥状扫描销10。传感器30只要能够以光线L相对于第二开口部的中心正入射、且光线L相对于第二开口部的边缘倾斜入射的方式扫描光线L,则传感器30的结构并不限定于特定的结构。例如,传感器30不一定限定于通过反射镜进行光线的扫描的结构。
位置观测装置40具有图像生成部41、评价部42、切换部43和显示控制部44。位置观测装置40构成为能够与传感器30进行通信。位置观测装置40与传感器30的通信既可以通过无线进行,也可以通过有线进行。另外,位置观测装置40构成为能够与显示装置50进行通信。显示装置50是液晶显示器以及有机EL显示器这样的显示装置。显示装置50基于从位置观测装置40传送的数据来显示各种图像。位置观测装置40与显示装置50的通信既可以通过无线进行,也可以通过有线进行。
图像生成部41基于来自传感器30的传感器数据来生成图像。图像生成部41分别生成例如以反射光的亮度为像素值的第一图像和以基于反射光计算出的深度为像素值的第二图像。第一图像是根据针对传感器30的各个扫描位置检测出的红外光的亮度的值而对各个像素分配值而生成的红外图像。另一方面,第二图像是根据深度的值对各个像素分配值而生成的深度图像,该深度的值是根据针对传感器30的各个扫描位置检测出的红外光的例如投受光的时间差而计算出的。
评价部42通过图像生成部41评价第一图像或第二图像,从而评价销10与销座20的位置偏移。关于位置偏移的评价方法的详细,在后面说明。
切换部43根据评价部42的评价结果,将向显示控制部44输出的图像切换为第一图像和第二图像中的某一个。关于切换的详细,在后面说明。
显示控制部44将从切换部43输入的图像显示在显示装置50上。显示控制部44也可以根据需要而在从切换部43输入的图像上重叠各种信息并显示在显示装置50上。
图3是表示位置观测装置40的硬件结构的一例的图。位置观测装置40可以是个人计算机(PC)\平板终端等各种终端装置。如图3所示,位置观测装置40具有处理器401、ROM402、RAM403、存储器404、输入接口405、通信装置406作为硬件。
处理器401是对位置观测装置40的整体动作进行控制的处理器。处理器401通过执行例如存储在存储器404中的程序,而作为图像生成部41、评价部42、切换部43和显示控制部44进行动作。处理器401例如是CPU(Central Processing Unit:中央处理单元)。处理器401也可以是MPU(Micro-Processing Unit:微处理单元)、GPU(Graphics ProcessingUnit:图形处理单元)、ASIC(Application Specific Integrated Circuit:面向特定用途的集成电路)、FPGA(Field Programmable GateArray:现场可编程门阵列)等。处理器401可以是单一的CPU等,也可以是多个CPU等。
ROM(Read Only Memory:只读存储器)402是非易失性的存储器。ROM402存储有位置观测装置40的启动程序以及各种阈值等。RAM(RandomAccess Memory:随机存取存储器)403是易失性的存储器。RAM403例如用作处理器401中的处理时的工作存储器。
存储器404例如是硬盘驱动器、固态驱动器这样的存储器。存储器404存储有位置观测程序等由处理器401执行的各种程序。
输入接口405包括触摸面板、键盘、鼠标等输入装置。在进行了输入接口405的输入装置的操作的情况下,与操作内容对应的信号被输入到处理器401。处理器401根据该信号进行各种处理。
通信装置406是用于位置观测装置40与传感器30以及显示装置50这样的外部设备进行通信的通信装置。通信装置406可以是用于有线通信的通信装置,也可以是用于无线通信的通信装置。
接着,对位置观测系统的动作进行说明。图4是表示位置观测装置40的动作的流程图。图4的处理由处理器401执行。在图4的处理中,作业员一边观察显示在显示装置50上的图像,一边操作例如起重机将车体1的销10插入到台车2的销座20。此时,传感器30一边向销座20投射光线,一边经由销座20实施销10的扫描。然后,传感器30将传感器数据依次发送到位置观测装置40。当接收到传感器数据时,处理器401开始图4的处理。
在步骤S1中,处理器401基于来自传感器30的传感器数据,分别生成作为第一图像的红外图像和作为第二图像的深度图像。如上所述,红外图像是根据从传感器数据得到的红外光的亮度而被分配各个像素值而得到的图像。另外,深度图像是根据基于从传感器数据得到的红外光的投受光的时间差而计算出的深度而被分配各个像素值而得到的图像。
在步骤S2中,处理器401检测红外图像中的暗部。在此,对红外图像中的暗部进行说明。
图5A是表示销10与销座20之间的水平方向的位置偏移大时的从传感器30投射的光线与销10的关系的图。在实施方式中,光线从传感器30投射为圆锥状。即,光线从销座20的第二开口部的边缘倾斜地被射出。因此,如图5A所示,在销10的中心从销座20的中心C大幅偏移时,从传感器30投射并从销座20的第二开口部射出的一部分光线L1被销10的前端反射,与此相对,一部分光线L2不射到销10的前端而从销10的侧面穿过。因此,光线L2的反射光不返回,或者即使返回也比光线L1的反射光微弱。在此,在销10的中心从销座20的中心C较大地偏移时,光线L2偏向于从销座20的特定的部分射出的光线。例如在图5A中,光线L2偏向从销座20的右侧射出的光线。
图5B是表示根据图5A的状况得到的红外图像的例子的图。光线L2的反射光相对于光线L1的反射光而言微弱。因此,在红外图像200中,基于光线L1的反射光的部分成为表示销10的前端的形状的亮部201,与此相对,基于光线L2的反射光的部分成为暗部202。在此,当销10与销座20之间的水平方向的位置偏移大时,光线L2产生偏向,因此暗部202的形状相对于表示销座20的圆的中心而成为非对称。
图6A是表示销10与销座20之间的水平方向的位置偏移小时的从传感器30投射的光线与销10的关系的图。如图6A所示,即使在销10的中心与销座20的中心C大致一致时,从传感器30投射并从销座20的第二开口部射出的一部分光线L2也不会照射到销10的前端而直接穿过。但是,在销10的中心与销座20的中心C大致一致时,光线L2从销座20的第二开口部的边缘大致均匀地射出。
图6B是表示根据图6A的状况得到的红外图像的例子的图。由于光线L2从销座20的第二开口部的边缘大致均匀地射出,所以红外图像200中的暗部202的形状成为相对于表示销座20的圆的中心大致对称的带。
图7A是表示在销10与销座20之间的水平方向的位置偏移小的状态下销10接近销座20时的从传感器30投射的光线与销10的关系的图。如图7A所示,若销10与销座20的距离变短,则在销10的侧面穿过的光线L2的数量变少。
图7B是表示根据图7A的状况得到的红外图像的例子的图。由于光线L2的数量减少,所以红外图像200中作为暗部202的带的宽度比销10与销座20的距离远的情况细。在销10被插入到销座20中之后,红外图像200中作为暗部202的带几乎看不到。
这样,暗部202的形状根据销10与销座20的位置偏移而变化。因此,能够根据暗部202的形状来评价销10与销座20的偏移量。基于这样的原理,处理器401将红外图像200中的例如规定像素值以下的区域检测为暗部202。
在步骤S3中,处理器401确定销10与销座20之间的偏移量是否大。处理器401例如在暗部202的形状相对于表示销座20的圆的中心不具有某阈值以上的对称性时,判定为销10与销座20的偏移量大。另外,在销座20上完全没有销10的情况下,暗部202的形状也可以对称。但是,在该情况下,不存在亮部201。在这样的红外图像200中不存在亮部201和暗部202的边界的情况下,处理器401也判定为销10与销座20的偏移量大。在步骤S3中判定为销10与销座20的偏移量大时,处理转移到步骤S4。在步骤S3中判定为销10与销座20的偏移量不大时,处理转移到步骤S6。
在步骤S4中,处理器401使显示装置50显示红外图像。然后,处理器401使处理转移到步骤S5。通过在显示装置50上显示图5A所示的红外图像,作业员能够从显示装置50观测销10与销座20之间的位置偏移。在此,除了图5A所示的红外图像之外,也可以进行起重机的操作方向的引导显示,该起重机的操作方向与根据暗部202的对称性而判定的销10与销座20的偏移的方向对应。
在步骤S5中,处理器401判定位置观测装置40的动作是否结束。例如,在通过作业员的输入接口405的操作而指示了动作的结束的情况下,处理器401判定为结束位置观测装置40的动作。在步骤S5中判定为结束位置观测装置40的动作时,结束图4的处理。在步骤S5中未判定为结束位置观测装置40的动作时,处理返回步骤S1。
在步骤S6中,处理器401计算红外图像200中作为暗部202的带的宽度。
在步骤S7中,处理器401判定是否为销10插入销座20的状态。处理器401例如在作为暗部202的带的宽度比预先确定的阈值粗时,判定为不是销10插入销座20的状态。在步骤S7中判定为不是销10插入销座20的状态时,处理转移到步骤S8。在步骤S7中判定为是销10插入销座20的状态时,处理转移到步骤S9。
在步骤S8中,处理器401使显示装置50显示红外图像。然后,处理器401使处理转移到步骤S5。通过在显示装置50上显示图6B或图7B所示的红外图像,作业员能够从显示装置50观测销10与销座20的水平方向的位置偏移变小的情况。另外,作业员能够一边观察红外图像中的带的宽度一边进行销10与销座20的水平方向的微调。在此,除了图6B或图7B所示的红外图像之外,也可以进行起重机的操作方向的引导显示,该起重机的操作方向与根据暗部202的带的宽度判定的销10与销座20的偏移的方向对应。
在步骤S9中,处理器401使显示装置50显示深度图像。然后,处理器401使处理转移到步骤S5。如上所述,在销10插入到销座20中之后,红外图像200中作为暗部202的带几乎看不到。另一方面,作业员为了将销10完全插入销座20而需要操作起重机。如果作业员过于降低起重机,则存在车体1与台车2接触而使台车2破损的可能性。因此,希望能够确认销10以何种程度插入销座20。但是,在红外图像200中,难以确认销10与销座20的铅垂方向的位置关系。因此,在销10成为插入状态后,处理器401将在显示装置50上显示的图像从红外图像切换为深度图像。
图8A及图8B是表示与销10与销座20的铅垂方向的位置关系对应的深度图像的变化的图。如图8A所示,在深度图像300中,根据相对于传感器30的深度而分配像素值。由此,能够表示销10与销座20的位置关系。即,当销10与销座20的铅垂方向的位置关系为某个关系时,如图8A所示,深度图像300中的销10的部分301具有与传感器30和销10的距离对应的某个像素值。另一方面,当将销10进一步插入销座20中时,如图8B所示,深度图像300中的销10的部分301具有与图8A中的像素值不同的像素值。这样,作业员能够在显示装置50中确认销10相对于销承接部20的插入状态。
在此,图8A中的销10的部分301的图像和图8B中的销10的部分301的图像不仅可以改变像素值,也可以改变颜色等。通过根据销10与销座20的铅垂方向的位置关系来改变颜色等,作业员在显示装置50的图像上更容易确认销10与销座20的铅垂方向的位置关系。
如以上说明那样,根据实施方式,在从具有贯通孔的第一对象物中的贯通孔的一个开口部插入第二对象物时的第一对象物与第二对象物的相对的位置关系的观测中,使用以面向贯通孔的另一个开口部的方式配置的传感器,该传感器朝向贯通孔扫描光线,并接收来自第二对象物的光线的反射光。在此情况下,根据与贯通孔的截面方向水平的方向上的第一对象物与第二对象物的相对的位置关系,可能发生光线的穿过。将该光线的穿过被检测为图像中的暗部,从而能够在图像上评价第一对象物与第二对象物的相对的位置关系。另外,通过显示包含这样的暗部的图像,作业员能够观测第一对象物与第二对象物的相对的位置关系。在实施方式中,只要能够以面向贯通孔的方式配置传感器即可,所以不需要地坑的形成等,能够以低成本实现位置观测系统。
另外,在实施方式中,不在对象物上设定标记等的基准位置,另外,不在图像上检测标记等的基准位置,就能够进行相对位置的观测。因此,特别适合于大型的对象物之间的相对位置的观测。
此外,在实施方式中,在将第二对象物插入第一对象物之后,将显示在显示装置上的图像从将反射光的亮度作为像素值的第一图像切换为将基于反射光计算出的相对于传感器的深度作为像素值的第二图像。由此,作业员在对第一对象物插入了第二对象物之后也能够在图像上观测第一对象物与第二对象物的插入状态。
另外,在实施方式中,使用红外光线作为光线。由此,即使不是照明环境下,也能够进行经由贯通孔的相对位置的观测。
[变形例]
以下,对实施方式的变形例进行说明。在上述的实施方式中,在将第二对象物插入第一对象物之后,将显示在显示装置上的图像从将反射光的亮度作为像素值的第一图像切换为将基于反射光计算出的相对于传感器的深度作为像素值的第二图像。与此相对,在第二对象物被插入第一对象物之前,显示在显示装置上的图像可以是第二图像。在该情况下,暗部202的部分作为表示相对远距离的图像而生成。
另外,在实施方式中,使用红外光作为光线,但只要是能够对贯通孔进行照明的环境下,也可以使用可见光作为光线。在此情况下,可以在显示装置50上显示彩色图像来代替红外图像。
另外,在实施方式中,在步骤S1中生成红外图像和深度图像两者。与此相对,深度图像也可以在步骤S9的处理时生成。
另外,在实施方式中,在判定为是销10被插入销座20的状态时,显示装置50所显示的图像从红外图像自动切换为深度图像。与此相对,也可以通过例如作业员操作输入接口405来切换显示在显示装置50上的图像。在该情况下,步骤S7的判定被置换为是否接受了作业员的用于切换的操作。然后,处理器401在判定为接受了用于切换的操作时,使处理转移到步骤S9。此外,可以将从图像到深度图像的自动切换和手动切换一起使用。在该情况下,分别进行图4的步骤S7所示的是否为销10插入销座20的状态的判定和是否接受了作业员的用于切换的操作的判定。
另外,在实施方式中,示出了位置观测系统能够在铁道车辆的车体与台车的连结时使用的例子。与此相对,实施方式的位置观测系统不限于一定在铁道车辆的车体与台车的连结时使用。在该情况下,传感器不需要一定配置在第一对象物的下方。例如,在第二对象物从贯通孔的下方的开口部插入时,传感器以面向贯通孔的上方的开口部的方式配置。另外,在从沿水平方向形成的贯通孔的一个开口部插入第二对象物时,传感器被配置成面向贯通孔的另一个开口部。
说明了本发明的几个实施方式,但这些实施方式是作为例子而提示的,并不意图限定发明的范围。这些新的实施方式能够以其他各种方式实施,在不脱离发明的主旨的范围内,能够进行各种省略、置换、变更。这些实施方式以及其变形包含在发明的范围以及主旨内,并且包含在权利要求书所记载的发明以及其等同的范围内。
- 位置控制系统、位置检测装置及记录介质
- 永磁同步电机的混合位置观测器及无位置传感器伺服系统
- 集线装置、中继控制方法、中继控制程序、记录了中继控制程序的记录介质、信息处理装置、动态主机配置协议服务器、动态主机配置协议处理方法、动态主机配置协议处理程序、记录了动态主机配置协议处理程序的记录介质、以及信息处理系统
- 服务提供系统的收费方法、服务提供服务器、服务提供程序、记录了服务提供程序的记录介质、终端装置、终端处理程序、及记录了终端处理程序的记录介质