一种用于防爆比例压力阀的液压控制系统
文献发布时间:2023-06-19 19:20:08
技术领域
本发明涉及液压控制领域,特别是涉及一种用于防爆比例压力阀的液压控制系统。
背景技术
作为工业技术与控制技术结合的产物,液压控制系统以其较快的响应速度、较高的控制精度、较大的抗负载刚度和功率重量比等优势,已逐渐在不同的工业领域中得到广泛应用。液压控制系统作为计算机微电子控制技术与重型工程机械的联接要点,能够解决实际工程应用中的诸多难题,如:控制精度不高、滞后性、非线性死区等。
液压控制系统为根据液压系统的模拟量或数字量信号,对控制目标(压力、位置、速度、加速度等)实现比例控制的系统,其主要执行元件之一为防爆比例压力阀。防爆比例压力阀可以根据控制器发出的电流大小,按线性比例调节液压系统的油压大小,实现液压系统反馈控制。
现有技术中,用于防爆比例压力阀的液压控制系统存在控制精度不高,响应速度慢的缺点,无法满足实际工程液压机械的控制要求。
发明内容
鉴于上述问题,提出了本发明,以便提供一种用于防爆比例压力阀的液压控制系统,能够改善控制精度,提高响应速度。
本发明公开了一种用于防爆比例压力阀的液压控制系统,包括控制器、DA转换器、跨导放大器、比例压力阀、液压装置、压力传感器和AD转换器,其中所述AD转换器、所述DA转换器和所述跨导放大器为高速装置;
具体的,所述控制器的输出端连接所述DA转换器的输入端,所述DA转换器的输出端连接所述跨导放大器的输入端,所述跨导放大器的输出端连接所述防爆比例压力阀的输入端,所述防爆比例压力阀的输出端连接所述液压装置,所述压力传感器对所述防爆比例压力阀进行检测,其输出端连接所述AD转换器的输入端,所述AD转换器的输出端连接所述控制器的输入端。
进一步的,所述压力传感器对所述防爆比例压力阀的压力进行实时检测,通过所述AD转换器转换为数字反馈量后输入到所述控制器,所述控制器根据数字反馈量和参考阈值比较后得出偏差信号,经PID计算后,产生数字电压控制信号,所述DA转换器将数字电压控制信号进行数模转换后,得到模拟电压控制信号,之后所述跨导放大器放大转换后产生电流控制信号,控制所述防爆比例压力阀,实现所述液压装置驱动控制。
进一步的,所述AD转换器可采用16位ADS7825芯片。
进一步的,所述DA转换器可采用16位DAC7731芯片。
进一步的,所述跨导放大器包括第一MOS管M1、第二MOS管M2、第三MOS管M3、第四MOS管M4、第五MOS管M5、第六MOS管M6、第七MOS管M7、第八MOS管M8、第九MOS管M9、第十MOS管M10、第十一MOS管M11、第十二MOS管M12、第一电容C1、第二电容C2和电阻R;
第一MOS管M1的源极、第四MOS管M4的源极、第七MOS管M7的源极、第十MOS管M10的源极共同连接电源VDD,第一MOS管M1的栅极连接第四MOS管M4的栅极、第四MOS管M4的漏极,第一MOS管M1的漏极连接第二MOS管M2的漏极、第二MOS管M2的栅极,第四MOS管M4的漏极还连接第五MOS管M5的漏极、第六MOS管M6的栅极,第五MOS管M5的栅极连接第一电容C1的第一端、第三MOS管M3的漏极,第一电容C1的第二端连接第五MOS管M5的衬底,并连接第一输入端Vin-,第三MOS管M3的栅极连接第三MOS管M3的源极和电源VDD,第五MOS管M5的源极连接电阻R的第一端、第六MOS管M6的漏极,第七MOS管M7的栅极连接第七MOS管M7的漏极、第十一MOS管M11的栅极,第七MOS管M7的漏极还连接第八MOS管M8的漏极、第九MOS管M9的栅极,第八MOS管M8的栅极连接第二电容C2的第一端、第十MOS管M10的漏极,第二电容C2的第二端连接第八MOS管M8的衬底,并连接第二输入端Vin+,作为跨导放大器的输入端,第十MOS管M10的栅极和源极共同连接电源VDD,第八MOS管M8的栅极连接电阻R的第二端、第九MOS管M9的漏极,第十一MOS管M11的漏极连接第十二MOS管M12的漏极,并作为跨导放大器的电流输出端Iout,第十二MOS管M12的栅极连接第二MOS管M2的栅极,第二MOS管M2的源极、第六MOS管M6的源极、第九MOS管M9的源极、第十二MOS管M12的源极共同连接供电接地端VSS,第一输入端Vin-连接信号接地端。
进一步的,所述第一MOS管M1、第三MOS管M3、第四MOS管M4、第七MOS管M7、第十MOS管M10、第十一MOS管M11为PMOS管,第二MOS管M2、第五MOS管M5、第八MOS管M8、第六MOS管M6、第九MOS管M9、第十二MOS管M12为NMOS管。
本发明的有益效果是:
(1)本发明提供了一种用于防爆比例压力阀的液压控制系统,利用控制器的数字反馈控制,改善了防爆比例压力阀控制精度,同时采用高速AD转换器、DA转换器和跨导放大器,提高了系统响应速度。
(2)本发明提供了一种高速跨导放大器,采用衬底驱动技术、源极负反馈技术、电压跟随结构、等效电容增大技术,综合提高了输出电流响应速度,实现了高速跨导放大器。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
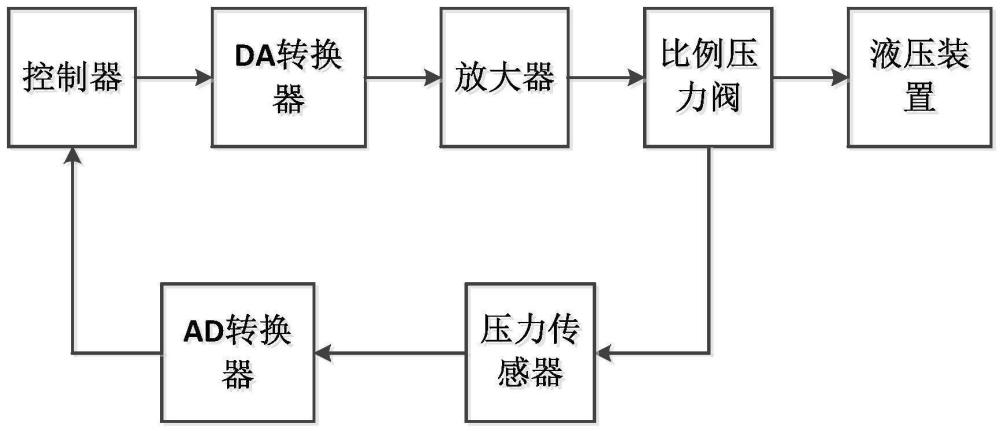
图1为本发明提供的用于防爆比例压力阀的液压控制系统的示意图;
图2为本发明提供的高速跨导放大器的电路结构图。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在本申请实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本申请。在本申请实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义,“多种”一般包含至少两种,但是不排除包含至少一种的情况。
下面结合附图和具体实施例对本发明作进一步说明。
图1为本发明提供的一种用于防爆比例压力阀的液压控制系统,该液压控制系统包括控制器、DA转换器、跨导放大器、比例压力阀、液压装置、压力传感器和AD转换器,其中AD转换器、DA转换器和跨导放大器为高速装置。
其中,控制器的输出端连接DA转换器的输入端,DA转换器的输出端连接跨导放大器的输入端,跨导放大器的输出端连接防爆比例压力阀的输入端,防爆比例压力阀的输出端连接液压装置,压力传感器对防爆比例压力阀进行检测,其输出端连接AD转换器的输入端,AD转换器的输出端连接控制器的输入端。
具体的,当液压控制系统工作时,压力传感器对防爆比例压力阀的压力进行实时检测,通过AD转换器转换为数字反馈量后输入到控制器,控制器根据数字反馈量和参考阈值比较后得出偏差信号,经PID计算后,产生数字电压控制信号,DA转换器将数字电压控制信号进行数模转换后,得到模拟电压控制信号,之后跨导放大器放大转换后产生电流控制信号,控制防爆比例压力阀,通过控制防爆比例压力阀的开口方向和开口量的大小,改变其压力和流量,实现液压装置驱动控制。
在本申请的液压控制系统中,利用控制器的数字反馈控制,改善了防爆比例压力阀控制精度,同时采用高速AD转换器、DA转换器和跨导放大器,5提高了系统响应速度。
在本申请的另一实施例中,AD转换器可采用16位ADS7825芯片,其采样及转换时间最大为25μs。
在本申请的另一实施例中,DA转换器可采用16位DAC7731芯片,转换时间5μs。
0在本申请的另一实施例中,高速跨导放大器如图2所示。该高速跨导放大器包括第一MOS管M1、第二MOS管M2、第三MOS管M3、第四MOS管M4、第五MOS管M5、第六MOS管M6、第七MOS管M7、第八MOS管M8、第九MOS管M9、第十MOS管M10、第十一MOS管M11、第十二MOS管M12、第一电容C1、第二电容C2和电阻R。
5第一MOS管M1的源极、第四MOS管M4的源极、第七MOS管M7的源极、第十MOS管M10的源极共同连接电源VDD,第一MOS管M1的栅极连接第四MOS管M4的栅极、第四MOS管M4的漏极,第一MOS管M1的漏极连接第二MOS管M2的漏极、第二MOS管M2的栅极,第四MOS
管M4的漏极还连接第五MOS管M5的漏极、第六MOS管M6的栅极,第0五MOS管M5的栅极连接第一电容C1的第一端、第三MOS管M3的漏极,
第一电容C1的第二端连接第五MOS管M5的衬底,并连接第一输入端Vin-,第三MOS管M3的栅极连接第三MOS管M3的源极和电源VDD,第五MOS管M5的源极连接电阻R的第一端、第六MOS管M6的漏极,第七MOS管M7的栅极连接第七MOS管M7的漏极、第十一MOS管M11的栅极,第七5MOS管M7的漏极还连接第八MOS管M8的漏极、第九MOS管M9的栅极,
第八MOS管M8的栅极连接第二电容C2的第一端、第十MOS管M10的漏极,第二电容C2的第二端连接第八MOS管M8的衬底,并连接第二输入端Vin+,作为跨导放大器的输入端,第十MOS管M10的栅极和源极共同连接电源VDD,第八MOS管M8的栅极连接电阻R的第二端、第九MOS管M9的漏极,第十一MOS管M11的漏极连接第十二MOS管M12的漏极,并作为跨导放大器的电流输出端Iout,第十二MOS管M12的栅极连接第二MOS管M2的栅极,第二MOS管M2的源极、第六MOS管M6的源极、第九MOS管M9的源极、第十二MOS管M12的源极共同连接供电接地端VSS。
其中,第一MOS管M1、第三MOS管M3、第四MOS管M4、第七MOS管M7、第十MOS管M10、第十一MOS管M11为PMOS管,第二MOS管M2、第五MOS管M5、第八MOS管M8、第六MOS管M6、第九MOS管M9、第十二MOS管M12为NMOS管。
进一步的,第一输入端Vin-连接信号接地端。该跨导放大器将第二输入端Vin+的模拟电压控制信号转换为电流控制信号,在电流输出端Iout输出。
在该跨导放大器中,第五MOS管M5、第八MOS管M8为差分输入对管,采用衬底驱动方式,以产生尾电流,第四MOS管M4、第七MOS管M7以二极管连接方式作为输入级的有源负载,并与第一MOS管M1、第十一MOS管M11构成电流镜,其中电流镜的镜像系数决定了电流放大倍数。第二MOS管M2、第十二MOS管M12构成单位电流镜。该跨导放大器根据二输入端Vin+和第一输入端Vin-的差值,产生对应的电流控制信号进行输出。在本申请中,设置第一输入端Vin-连接信号接地端,因此该跨导放大器将第二输入端Vin+的模拟电压控制信号转换为电流控制信号进行输出。
其中,第五MOS管M5、第八MOS管M8采用衬底驱动,加快尾电流建立时间,提高输出电流响应速度。第五MOS管M5、第六MOS管M6、第八MOS管M8、第九MOS管M9、电阻R构成全差分共源极电路,通过添加源极负反馈电阻R来提高精确度。由于第五MOS管M5、第六MOS管M6、第八MOS管M8、第九MOS管M9形成了电压跟随结构,能够实现自适应静态偏置,即根据第五MOS管M5、第八MOS管M8衬底处的差分电压产生动态尾电流,动态改善输出电流响应速度。同时该跨导放大器还采用第一电容C1、第二电容C2和处于截止区的第三MOS管M3、第十MOS管M10以增大等效电容,提高第五MOS管M5、第八MOS管M8的等效跨导,增大流过第五MOS管M5、第八MOS管M8的电流,进一步提高了输出电流响应速度,实现了高速跨导放大器。
本发明在高速跨导放大器中,采用衬底驱动技术、源极负反馈技术、电压跟随结构、等效电容增大技术,综合提高了输出电流响应速度,实现了高速跨导放大器
上述说明示出并描述了本发明的若干优选实施例,但如前所述,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
- 一种基于比例减压阀调定出口压力的液压控制系统
- 一种比例阀控蓄能器的盾构刀盘回转驱动压力适应液压控制系统