一种用于对接穿越的液压装置、控制方法及水平定向钻机
文献发布时间:2023-06-19 19:21:53
技术领域
本发明涉及液压控制系统技术领域,具体是一种用于对接穿越的液压装置、控制方法及水平定向钻机。
背景技术
随着大型石油、天燃气管道工程越来越多,大管径、长施工距离的工程日益增多,对大型水平定向钻机的导向施工要求越来越高,近年来,尤其对于长度2000米以上工程采用对接穿越工法施工的工程数量与日俱增。对接穿越工法是采用两台钻机,主钻机和辅钻机分别置于入土点和出土点,分别进行导向施工,两钻头在水平段对接。对接成功后辅钻机钻头后拉,同时引导主钻机导向钻头沿辅钻机导向孔前进。在该过程中,由两侧司钻进行配合,目前多以对讲机通话联系,实时沟通两台钻机扭矩推拉力等参数。由于管道长,沟通及数据滞后性大,导致施工过程安全性差,钻杆易受到异常推力弯曲,且进展缓慢,严重影响了施工效率。
发明内容
本发明所要解决的技术问题在于克服上述现有技术的不足,提供一种操作简单、安全性高的用于对接穿越的液压装置、控制方法及水平定向钻机,解决现有技术对接穿越工法中需主辅钻机两名司钻实时相互配合导致的施工效率及安全性低的问题。同时由于对接穿越模式下,动力头马达自动处于“0排量”状态,大大减小了辅助阀组的通过流量,减小了动力头运行阻力。
本发明是以如下技术方案实现的:一种用于对接穿越的液压装置,包括主泵、主阀组、动力头马达一、动力头马达二、辅助阀组;所述主泵进油口与液压油箱连通,其出油口与主阀组油口P连通,所述动力头马达一、动力头马达二以并联方式与主阀组油口A、B连通;所述辅助阀组油口A1、B1分别与主阀组油口A、B连通,辅助阀组回油口T1与主阀组回油口T连通,辅助阀组的回油口T与液压油箱连通;所述主阀组、辅助阀组、动力头马达一、动力头马达二通过线束与控制器相连。
进一步的,所述辅助阀组包括电磁换向阀、单向阀;所述的电磁换向阀油口A、B通过阀块内部沟通,电磁换向阀油口T口与单向阀油口a通过阀块内部沟通,同时与辅助阀组回油口T1相连,单向阀出口b与液压油箱相连。
进一步的,所述动力头马达一、动力头马达二为旋转马达或推拉马达;所述主泵为与动力头马达相应的旋转泵或推拉泵;所述主阀组为与动力头马达相应的旋转阀或推拉阀。
进一步的,所述动力头马达一、动力头马达二为电比例变量马达。
进一步的,所述控制器为PLC控制器,PLC控制器输入端与模式选择和液压油路的压力传感器电连接,其输出端与主、辅助阀组的线圈和动力头马达电连接。
进一步的,一种用于对接穿越的液压装置的控制方法,包括正常工作模式和/或对接穿越模式;
所述正常工作模式为辅助阀组中电磁线圈不得电,辅助阀组油路处于断开状态,主阀组电磁线圈得电对油路独立控制,电磁线圈Y11与Y12得电控制动力头动作。
所述对接穿越模式为辅助阀组电磁线圈Y21或Y22得电,辅助阀组油口A1、B1、T1均处于导通状态,同时,动力头马达一、动力头马达二得电,马达均处于“0排量”状态;此时,主阀组线圈Y11、Y12均不得电,主泵通过主阀组中位卸荷。
进一步的,所述对接穿越模式的启动流程为:
步骤一、开启对接穿越模式,控制器自动检测主阀组电磁线圈电流是否为0,如果主阀组电磁线圈电流不为0,则提醒用户,控制器重复检测主阀组电磁线圈电流。
步骤二、当主阀组电磁线圈电流为0,控制器自动检测推位力是否在安全范围,如果推位力不处于安全范围,则提醒用户,控制器重复检测推位力。
步骤三、当推位力处于安全范围,控制器控制动力头马达一、动力头马达二的Y01、Y02得电至最大电流,同时辅助阀组电磁线圈Y21或Y22得电,进入对接穿越模式。
进一步的,一种水平定向钻机,采用权利要求上述的液压装置。
进一步的,一种水平定向钻机的施工方法,采用上述的控制方法。
进一步的,所述的一种水平定向钻机的施工方法为:两台所述水平定向钻机对接穿越工法时,主钻机和辅钻机分别置于入土点和出土点,相向进行导向施工,主钻机和辅钻机采用正常工作模式,当主钻机和辅钻机钻头在水平段对接成功后,任意一台钻机切换至对接穿越模式,随动状态,自动自动跟随另一台钻机,另一台钻机则继续采用正常工作模式,进行协同作业。
本发明具有以下优点:本发明的一种用于对接穿越的液压装置、控制方法及水平定向钻机,通过配置辅助阀组,根据定向钻机在对接穿越施工时的主辅钻机配合施工需求特点,实现了主油路不变的情况下,现有技术中需主辅钻机两名司钻实时相互配合导致的施工效率及安全性低的问题。同时由于对接穿越模式下,动力头马达自动处于“0排量”状态,大大减小了辅助阀组的通过流量,也减小了动力头运行阻力。
附图说明
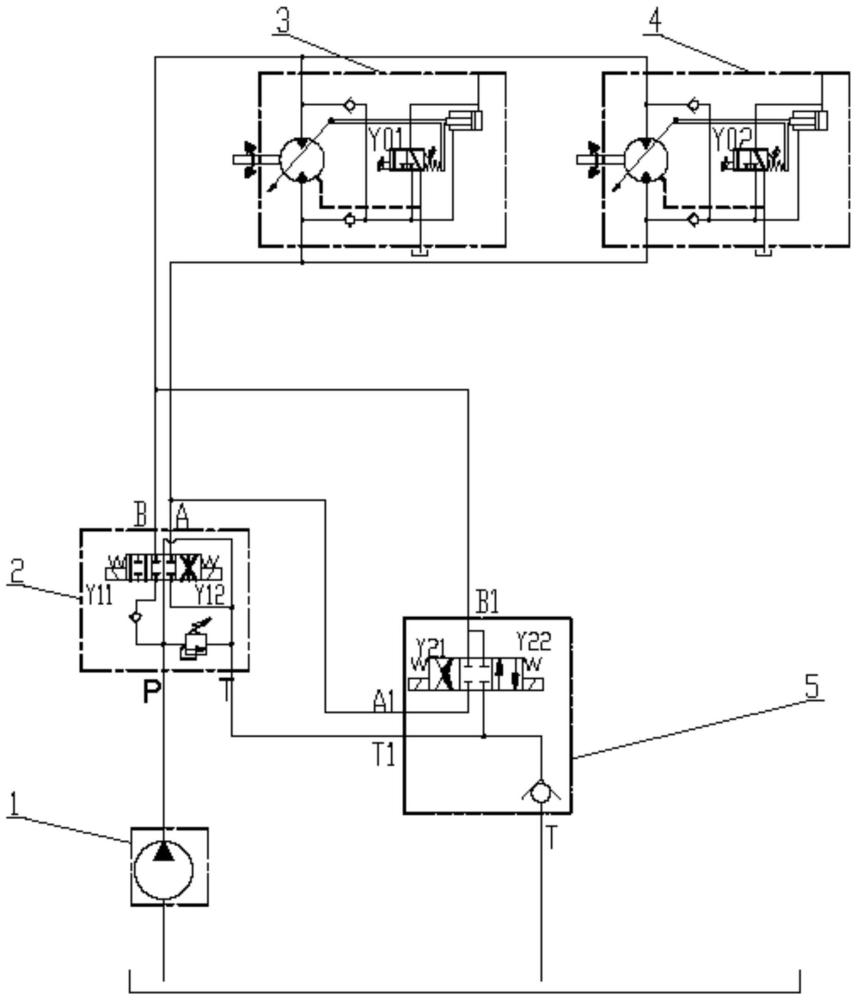
图1是本发明的液压原理图;
图2是本发明的辅助阀组原理图;
图3是本发明的控制方法的流程图;
图4是本发明的逻辑控制框图;
图5是动力头马达排量随电流变化曲线。
图中:1、主泵;2、主阀组;3、动力头马达一;4、动力头马达二;5、辅助阀组;6、电磁换向阀;7、单向阀。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本发明。
如图1至图5所示,一种用于对接穿越的液压装置,安装在水平定向钻机上,用于驱动钻头工作,其包括主泵1、主阀组2、动力头马达一3、动力头马达二4、辅助阀组5,所述主泵1进油口与液压油箱连通,其出油口与主阀组2油口P连通,所述动力头马达一3、动力头马达二4以并联方式与主阀组2油口A、B连通。所述辅助阀组5包含四个油口,其中油口A1、B1分别与主阀组2油口A、B连通,辅助阀组5回油口T1与主阀组2回油口T连通,辅助阀组5的回油口T与液压油箱连通。所述的辅助阀组5包括电磁换向阀6、单向阀7,所述的电磁换向阀6油口A、B通过阀块内部沟通,电磁换向阀6油口T口与单向阀7油口a通过阀块内部沟通,同时与辅助阀组5回油口T1相连。单向阀7出口b与液压油箱相连。所述主阀组2、辅助阀组5、动力头马达一3、动力头马达二4通过线束与控制器相连,每个主、辅助阀组5电磁线圈和动力头马达对应控制器不同端口,可单独控制输出。
动力头马达一3、动力头马达二4为控制动力头旋转动作的旋转马达或控制动力头推拉动作的推拉马达,相应地,主泵1为控制动力头旋转动作的旋转泵或控制动力头推拉动作的推拉泵,主阀组2为控制动力头旋转动作的旋转阀或控制动力头推拉动作的推拉阀。动力头马达为电比例变量马达,通过电流大小的变化,调节排量的变化,电流越大对应马达排量越小,电流越小对应马达排量越大。
所述电磁换向阀6、单向阀7均为标准件,且安装于集成块上,成本更低,更易实现通用化。单向阀7为系统提供背压,开启压力通常为2-5bar,避免动力头马达吸空。
本发明所述液压装置既可用于开式液压系统,也可用于闭式液压系统,既可用于动力头旋转液压系统,也可用于动力头推拉液压系统。控制方法类似,本发明以开式液压系统为实施例。
本发明所述液压装置的控制方法分为两种控制模式:正常工作模式、对接穿越模式。采用对接穿越工法时,主钻机和辅钻机分别置于入土点和出土点,相向进行导向施工,两台钻机独立操作,其并无关联,可用正常工作模式施工,此时,辅助阀组5中电磁线圈不得电,即辅助阀组5油路处于断开状态,主阀组2对油路独立控制,Y11与Y12正常控制动力头动作,与辅助阀组5无关,两台钻机互不影响,每台钻机均可正常操作,与正常钻机无异。当两台钻机对接完成需要联动时,可将两台钻机中任意一台切换至对接穿越模式,辅助阀组5电磁线圈Y21或Y22得电,即辅助阀组5油口A1、B1、T1均处于导通状态,动力头马达一3、动力头马达二4得电,使动力头马达均处于“0排量”状态,同时,主阀组2电磁线圈Y11、Y12均不得电,主泵1通过主阀组2中位卸荷,而动力头马达处于泵工况,对动力头起制动作用,所起的制动扭矩M=排量V×压差△P/62.8,此时马达排量V接近于0,压差△P由于辅助阀组5沟通也接近0,如此可实现制动扭矩M≈0,而此模式适用于钻机被动工作状态,即随动状态,被钻杆推拉动作。此时主钻机、辅钻机中一台处于正常工作模式,另一台处于对接穿越模式,处于对接穿越模式的钻机无需任何操作,而处于正常穿越模式的钻机操作时与钻机独立时一样,可前推、后拉,实现两台钻机自动协同作业。
例如,主钻机处于正常穿越模式,辅钻机处于对接穿越模式,则辅钻机可随动施工。主钻机操作前进动作时,辅钻机自动跟随后退。
如此,通过控制器分配控制液压装置的不同控制模式,可以解决现有技术中需主辅钻机两名司钻实时相互配合导致的施工效率低及安全性差的问题。
对接穿越模式的启动流程为:
步骤一、用户在主、辅钻机任一台上通过显示器或实体按钮开启对接穿越模式,该钻机的控制器自动检测主阀组2电磁线圈电流是否为0,即操作手柄是否在中位。如果主阀组2电磁线圈电流不为0,则通过显示器和/或语音提醒用户手柄回中,控制器重复检测主阀组2电磁线圈电流。
步骤二、当主阀组2电磁线圈电流为0,控制器自动检测推位力是否在安全范围,如果推位力不处于安全范围,则通过显示器和/或语音提醒用户释放推拉力,控制器重复检测推位力。
步骤三、当推位力处于安全范围,控制器控制动力头马达一3、动力头马达二4的Y01、Y02得电至最大电流,即动力头马达处于“0排量”,同时辅助阀组5电磁线圈Y22得电,开关量控制。
本发明的液压装置通过PLC控制器进行控制,PLC控制器接收模式选择信号和液压油路的压力传感器信号,并对主、辅助阀组5的电磁线圈电流和动力头马达电流进行控制,进而控制主、辅助阀组5和动力头马达。
控制器可根据旋扭或显示器输入,自动进行当前条件判断并通过显示器提醒用户,进而控制主、辅助阀组5和动力头马达动作,为一种交互式自动控制。
至此,已经详细描述了本公开的各实施例。为了避免遮蔽本公开的构思,没有描述本领域所公知的一些细节。本领域技术人员根据上面的描述,完全可以明白如何实施这里公开的技术方案。
虽然已经通过示例对本公开的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本公开的范围。本领域的技术人员应该理解,可在不脱离本公开的范围和精神的情况下,对以上实施例进行修改或者对部分技术特征进行等同替换。本公开的范围由所附权利要求来限定。
- 一种水平定向钻机液压控制系统
- 一种小型化水平定向钻机液压控制系统
- 一种用于无人船穿越水面绳索的装置及其使用方法
- 一种液压蓄能控制方法及其液压蓄能装置
- 一种用于水平定向钻机夹持翻转的液压系统及水平定向钻机
- 一种液压控制水下管道水平对接锁紧装置及对接锁紧方法