具有湿度识别的用于清洁设备的附件以及湿度识别方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及一种清洁设备、尤其洗地机(Saugwischer),其具有带有至少一个用于容纳清洁剂的清洁介质的壳体、用于容纳清洁介质的清洁介质载体、用于驱动清洁介质载体的驱动器以及控制器。本发明还涉及一种用于运行清洁设备的方法。
背景技术
由现有技术已知用于不同应用领域的清洁设备,其例如可设计为能由用户操作的具有附件的清洁设备或者设计为清洁机器人,其中清洁设备或附件用于不同的清洁任务,例如用于擦拭、用于吸尘或者用于这些任务的结合。因此,例如已知实施为用于擦拭清洁器的擦拭头的附件,其中浸有清洁剂的清洁介质用于清洁地面,实施为用于吸尘器的吸嘴的附件,其中为了清洁地面使用吸气流,以及实施为用于洗地机中的组合头的附件。
在本申请的意义上,清洁设备还理解为具有附件的清洁设备、用于与清洁设备一起使用的附件、以及清洁机器人。
在擦拭清洁器或洗地机中,清洁效率或清洁结果与清洁介质的湿度相关,其最优的数值又由待清洁的地面的表面特性决定。因此,例如具有粗糙表面或严重污染的表面的待清洁的地面与具有光滑表面的或仅轻微污染的待清洁的地面需要不同的湿度。就此而言,湿度理解为在清洁介质中液态清洁剂、尤其水和表面活性剂的混合物的含量。
为了辅助或改善清洁结果,清洁介质载体以及因此清洁介质可以通过驱动器置于振荡运动,其中术语“振荡运动”理解为基本上平行于或近平行(quasi-parallele)于壳体底侧的振荡运动。驱动器具有用于产生清洁介质载体的振荡运动所需的所有构件。因此,驱动器可以例如具有电动马达、偏心传动器、凸轮盘等合适的构件。
除了影响清洁结果之外,清洁介质的湿度也限制对使用清洁设备的用户的使用舒适性,因为清洁介质的湿度显著地影响清洁设备的由用户感知的振动,其中高振动、即高振动强度通常被感受为不舒适的。该振动也可称为感知的振动。
为了确定清洁介质的湿度,在现有技术的清洁设备中使用不同传感器,例如红外(IR)或电容传感器,其布置在清洁介质载体和/或清洁设备壳体的朝向清洁介质载体的底侧上。安装在清洁设备壳体内的控制器可以通知用户得出的清洁介质的湿度,用户据此可以进行湿度的手动修改,尤其后续润湿清洁介质。
然而现有技术中已知的清洁设备的缺点在于,用于确定湿度的传感器布置在污染区域内。在此,污染区域理解为清洁设备的以下区域,其与待清洁的地面、与清洁介质、与清洁介质载体和/或清洁介质在清洁设备的使用期间接触。
此外,已知的清洁设备中,不进行清洁介质的湿度与待清洁地面的表面特性的匹配,或者表面特性由用户、例如通过使用所谓的地面地图单独地确定,从而可能不能实现待清洁地面的最优清洁或仅能以用户方的高投入实现。
通过振荡运动产生的振动在清洁设备由用户使用时可能传递至用户,这在高振动的情况下一般感受为不舒适的,并且在经常使用清洁设备的情况下可能导致慢性超负荷炎症。振动也可能导致提高的磨损并因此导致清洁设备内部过早的构件失效。
发明内容
由此,本发明的目的在于,提供开头所述类型的清洁设备并提出一种用于运行清洁设备的方法,其克服前述问题中的至少一个。
根据本发明,该目的通过具有权利要求1所述特征的清洁设备实现。根据本发明的清洁设备的优选和有利的设计方案在从属权利要求中给出。该目的也通过用于运行清洁设备的方法实现。
根据本发明的清洁设备的特征在于,在壳体中布置至少一个用于检测振动的强度的振动传感器,并且控制器设置用于得出清洁介质的湿度,其中控制器分析振动强度的改变。
根据本发明已经认识到,清洁介质的湿度可通过由系统清洁介质-清洁介质载体的振荡运动诱导的振动的强度确定,因为清洁介质的湿度改变系统的振荡的总质量。因此,例如较高的湿度导致振荡的总质量增加,由此在清洁设备的壳体处能够确定振动的强度,该强度不同于在干燥清洁介质或具有更低湿度的清洁介质的情况下由振荡的总质量产生的振动的强度。因此,由振动传感器检测的振动的强度的变化是用于清洁介质湿度的量度,其中在最优湿度的情况下,振动强度可最小,由此能够改善清洁设备对用户的使用舒适性以及清洁设备的寿命。最优湿度也改善了对当前待清洁的地面的清洁结果。
优选检测沿垂直于清洁介质所处的(水平方向)平面的方向(检测方向)的振动或振动的强度。该平面平行于壳体底侧延伸并且在使用清洁设备时平行于或基本上平行于待清洁的地面延伸。沿下文中称作垂直方向的该方向的振动或振动的强度最大程度地与待清洁的地面的表面特性相关。
振动的强度在此上下文中优选理解为由振动引起的加速度。然而也可以基于振动的振幅/偏移或频率确定得出。
振动的强度由振动传感器检测,并且例如呈电和/或数字信号形式的数据被传送至控制器。控制器分析由振动传感器传送的数据并从该数据得出清洁介质的湿度。得出的湿度可以向使用清洁设备的用户、例如经由集成在清洁设备内的显示装置显示,从而如果清洁介质的湿度不适合于待清洁的地面或者振动的强度偏离对当前使用条件最优的数值,用户则可改变清洁介质的潮湿。为此,用户可例如向清洁介质供应清洁剂。相应地,用户可以以优化的湿度处理待清洁的地面,由此改善清洁结果和/或使振动或振动强度最小化。最优数值能够以清洁设备用户手册内的表格或类似形式提供给用户。
在本发明的范围内,振动传感器可例如设计为加速度传感器或陀螺仪,其中也可以使用或布置多个振动传感器以空间分辨地检测振动或者说用于沿多个空间方向检测,以例如彼此分开地检测沿水平和竖直方向的振动或为了得出振动强度而构成矢量和。
优选控制器具有通信接口,借助通信接口,控制器可以与一个或多个外部设备通信。因此可以想到,控制器与智能设备、尤其智能家居系统或智能电话通信,以为用户提供清洁设备不同的数据或接收用户的输入数据。
在清洁设备的另一设计方案中,控制器用于确定待清洁地面的表面特性,其中用于确定表面特性的控制器分析驱动器的功率数据。为此,控制器在信号技术上与驱动器相连。通过该连接将关于驱动器、尤其电动马达的功率数据的信息传送给控制器,控制器之后从该传送的数据确定待清洁地面的表面特性、尤其摩擦系数。功率数据尤其是由驱动器的电动马达接收的或借助感应生成的电能,其也可称为功率消耗或功率输出。为了确定,在清洁设备打开、但清洁介质不执行振荡的第一运行模式中,清洁设备可以由用户在待清洁地面上推动,其中通过清洁介质与待清洁地面的表面之间的摩擦,清洁介质或清洁介质载体从初始位置偏离并且电动马达暂时作为发电机运行。关于测得的感应的电能的信息是对待清洁地面的表面特性、尤其对摩擦系数的量度,因为电动马达的功率消耗在此情况下为负的。例如在粗糙地面的情况下,清洁介质载体在清洁设备运动时快速推到另一位置,由此出现高的感应。相反,在光滑地面的情况下,清洁介质载体仅承受微弱的位置改变,由此仅能够确定少量的感应。
替代地或补充地,在清洁介质执行振荡的另一运行模式中,可以通过电动马达的功率消耗确定待清洁地面的表面特性,功率消耗在粗糙表面(高摩擦系数)的情况下大于在光滑表面(低摩擦系数)的情况,其中电动马达的功率消耗在两种情况下均为正的。
在清洁设备的一种优选设计方案中,振动传感器具有至少一个用于检测壳体运动的加速度传感器。通过在清洁设备的壳体内布置加速度传感器,改善了对清洁介质的湿度的确定。为此,可以借助加速度传感器检测通过清洁设备的运动、例如通过由用户的来回推拉或者通过与障碍物的碰撞引起的清洁设备的加速度或由此导致的振动,从而用于分析数据并信号技术地与加速度传感器相连的控制器能够将由振荡的质量产生的振动或振动强度与上述由清洁设备的运动引起的振动相区分(diskriminieren)。
优选控制器具有存储单元并且控制器用于将检测到的振动强度与至少一个定义的或能定义的振动强度相比较。在此,定义的或能定义的振动强度可以是保存在存储单元内的振动强度,其为预定义的应用情况表征最优的湿度,或者是多个振动强度,其在清洁设备的至少一次先前的使用中测得并保存在控制器的存储单元内。控制器在比较之后可以例如在确定强度之间的过大偏差时通知用户,以确保改善的清洁结果或者提高的用户舒适性。
控制器也可优选用于将确定的表面特性与至少一个定义的或能定义的表面特性相比较。在此,定义的或能定义的表面特性可以是存储单元内的表面特性,或者是在至少一次先前使用清洁设备时确定并保存在控制器的存储单元内的多个表面特性。控制器可以在比较之后例如在确定了表面特性之间过大的偏差时通知用户,以确保改善的清洁结果。
根据清洁设备的另一设计方案,在壳体内布置有清洁剂计量单元,其中清洁剂计量单元具有箱、能电操纵的泵和数据和信号接口,并且其中控制器用于分析清洁剂计量单元的数据。
能电操纵的泵实现了清洁剂向清洁介质的自动供应。清洁剂的供应在此可以在时间上受控,通过用户动作或根据由控制器得出的湿度进行。为了供应,能电操纵的泵将清洁剂从与泵流体技术相连的箱输送至清洁介质。例如,可以在定义的时长之后(例如每60秒)、在用户操纵与清洁剂计量单元信号技术相连的开关之后、或者在控制器确定湿度过低之后供应预定义的量的清洁剂。通过数据和信号接口,清洁剂计量单元既可以从控制器接收激活信号,尤其在确定了过低的湿度之后,然后供应清洁剂,又可以将由能电操纵的泵输送的清洁剂的量通知给控制器。通过清洁剂的自动供应,可以进一步改善待清洁地面的清洁。此外,由清洁剂计量单元通知控制器输送的清洁剂的量能够实现进一步改善对清洁介质湿度的确定精度,因为同样构成用于清洁介质湿度的量度的由泵输送的清洁剂的量用作初始值,该初始值在通过控制器得出清洁介质的湿度时作为基础使用。
根据清洁设备的一种有利地设计方案,控制器用于在低于和/或高于振动强度的至少一个阈值、优选上阈值和下阈值时告知用户。因此控制器可以例如在高于上阈值时通知用户,在此情况下恐怕会损伤清洁设备、尤其驱动器或清洁介质载体。在此,控制器尤其考虑低于或高于阈值的时长,以在仅短时长地低于或高于阈值时不进行对用户的告知。所需的阈值可以保存在控制器的存储单元内。借助振动强度的阈值可以更加有利地检测清洁介质的状态、尤其清洁介质的磨损。因此,可以例如借助阈值识别清洁介质要进行的更换,其在清洁介质过高的污染或过高磨损的情况下是需要的。为此,所需的、部分针对清洁介质特定的阈值被保存在控制器的存储单元内。
优选控制器可以用于确定不允许的清洁介质湿度并用于在存在不允许的清洁介质湿度的情况下告知用户。在此上下文中,不允许的湿度是在使用结束后确定的湿度。这例如是以下情况,清洁设备在使用之后以仍旧潮湿的清洁介质搁置。为了确定不允许的湿度,控制器可以提取最后测得的振动传感器的数据并与开始使用时干燥的清洁介质的振动数据相比较。也可以检测最后由泵向清洁介质输送的清洁剂的量。为了为控制器和可能的告知装置(例如显示装置、通信接口)供应电压,可以使用布置在壳体内的蓄电池或者与清洁设备相连的电压源。
上述技术问题也通过一种用于运行清洁设备、优选根据本发明的清洁设备的方法解决,其中通过分析由振动传感器检测的振动的强度的变化得出清洁介质的湿度。针对该方法,设置至少一个振动传感器,但其中也可使用多个振动传感器。
在此,振动传感器检测由振荡的清洁介质引起的振动,其可以是用于清洁介质湿度的量度,并将其传导至清洁设备的控制器,控制器分析传送的数据。相应地,该方法实现了清洁介质湿度的得出。由该方法得出的湿度可以传送至使用清洁设备的用户,从而用户可以调节清洁介质的湿度,以因此改善清洁结果或使用舒适性。
在该方法的一种优选设计方案中,借助与清洁介质载体相连的驱动器的功率消耗确定待清洁地面的表面特性。为了确定待清洁地面的表面特性、尤其摩擦系数,可以使用清洁设备的驱动器的数据,其在清洁设备的控制器内被分析。数据涉及集成在驱动器内的电动马达的功率消耗。确定的表面特性可用于改善清洁结果,方式是以针对待清洁地面的表面特性最优的清洁介质的湿度清洁待清洁的地面。
在该方法的另一种设计方案中,清洁介质的湿度根据由振动传感器检测的振动强度通过由清洁剂计量单元向清洁介质供应清洁剂而变化。通过使清洁介质湿度根据检测的振动强度变化,一方面可以为待清洁地面设置最优的湿度,从而改善清洁结果。另一方面可以借助湿度的变化设置绝对的或局部的振动最小值,由此能够为使用借助该方法运行的清洁设备的用户改善使用舒适性。
优选在该方法中清洁介质的湿度根据借助驱动器的功率消耗确定的或者定义的或能定义的待清洁地面的表面特性通过由清洁剂计量单元向清洁介质供应清洁剂而变化。对最优清洁结果或者说由振荡的总质量产生的振动的绝对的或局部的最小值所需的清洁介质的湿度可以与待清洁地面的表面特性相关,从而在不同的待清洁地面的情况下可能需要不同的湿度。因此,针对改善清洁结果或使用舒适性需要相应地调节湿度,为此该方法将确定的待清洁地面的表面特性与存储的数值相比较并设置针对该应用情况最优的湿度。
在该方法的另一优选设计方案中,通过清洁设备的运动引起其的清洁设备的加速度由振动传感器的加速度传感器检测,并且其中由振动传感器检测的振动的强度与检测的加速度相区分。借助加速度传感器可以确定清洁设备是静止还是运动。借助该信息可以改善湿度的得出,其中湿度的得出仅基于由系统清洁介质-清洁介质载体的振荡运动引起的信号部分。
优选在该方法中,清洁剂供应模式根据振动强度、表面特性和/或清洁设备的加速度选择。通过选择清洁剂供应模式可以进一步改善清洁结果和/或使用舒适性。
在该上下文中,清洁剂供应模式理解为清洁剂供应的方式,其手动地、自动地在定义的时长(例如60秒)之后和/或自动地根据得出的湿度进行。因此,例如可考虑该方法首先确定待清洁地面的表面特性。为了改善精度,可以在后置的方法步骤中确定在确定表面特性的时间点清洁设备是静止还是运动。如果以足够的精度确定了表面特性,则可以分析检测的振动,以检测清洁介质的当前湿度。接着,可以开始自动的清洁剂供应,直至达到最优湿度(最大清洁结果和/或最小振动)并可以开始清洁过程。替代地,尤其当表面特性和/或加速度未足够精确地确定时,可以向清洁介质供应标准计量量,例如60ml,其针对大量待清洁地面在相应的最优湿度方面构成至少一个折中。
附图说明
下文中根据参照附图的实施例阐述本发明。在附图中示出了
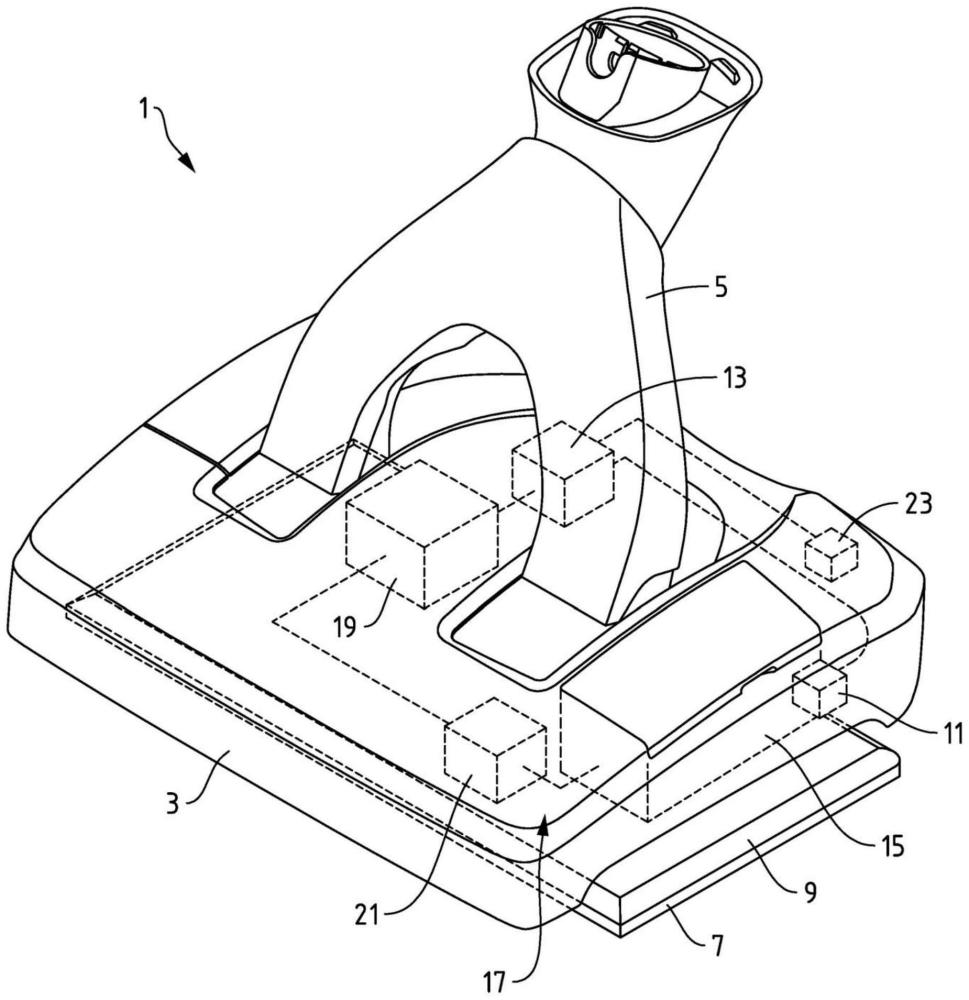
图1示出了设计为附件的清洁设备的透视图,
图2示出了与洗地机相连的附件的透视图,并且
图3示出了振动强度以及由用户感知的振动随着清洁介质的湿度的示例性变化。
具体实施方式
图1所示的清洁设备1配备有壳体3、连接件5、用于容纳清洁剂的至少一个清洁介质7以及用于容纳清洁介质7的清洁介质载体9。设置振动传感器11用于检测振动或振动的强度,设置控制器13用于分析至少一个振动传感器11的数据。在所示示例中,振动传感器11、控制器13、具有箱15的清洁剂计量单元17、以及驱动器19被布置在壳体3中,并且连接件5能枢转地支承在壳体3中。清洁介质7位于清洁介质载体9的背离壳体3底侧的底侧上,该清洁介质载体经由与清洁剂计量单元17的箱15的适用于液体传输的连接而用于为清洁介质7供给清洁剂,其中所需的流动功由同样布置在壳体3中的能电操纵的泵21提供。信号和数据接口实现了控制器13与清洁剂计量单元17之间的通信。
振动传感器11检测由系统清洁介质7-清洁介质载体9的振动运动诱导的振动或该振动的强度,并将该信息传送至控制器13。为此,振动传感器11在信号技术上与控制器13相连。
控制器13分析由振动传感器11传送的数据并由该数据得出清洁介质7的湿度。用户可以通过布置在壳体3中的显示装置23得知该得出的湿度,其中显示装置23在信号技术上与控制器13相连。控制器13在分析的范围内将检测到的振动、即传送的数据与存储在控制器13的存储单元内的数值相比较。存储的数值也可以是阈值、尤其振动强度的阈值,在低于和/或高于这些阈值时,控制器13告知用户。根据分析的结果,清洁剂计量单元17的能电操纵的泵21将清洁剂从箱15输送至清洁介质7。控制器13也可以通过比较获得清洁介质7的状态并将其通知用户。
除了得出清洁介质7的湿度以外,控制器13还用于确定待清洁的地面的表面特性,为此控制器13在信号技术上与驱动器19相连。通过该连接,控制器13获得关于驱动器19的功率数据的信息,该信息是确定表面特性、尤其摩擦系数的基础。这样确定的表面特性同样可以与至少一个存储在控制器13的存储单元内的表面特性相比较。
集成在加速度传感器11内的加速度传感器检测在清洁设备运动时产生的加速度,并将该数据借助信号技术连接传递至控制器13,该控制器分析该数据,并在必要时将由振动传感器11获得的数据相对于该数据区分,以改善确定清洁介质7的湿度的精度。
图2示出了安装有清洁设备1的洗地机27。供应布置在清洁设备1的壳体3内的装置所需的能量经由集成在连接件5内的接触件由布置在洗地机27中的电压源29提供。洗地机27具有布置在操作手柄31内的开关33,用于打开和关闭洗地机29和清洁设备1。在其下方,设置另外的开关35,用于激活和去激活擦拭功能。在此,擦拭功能可以理解为对清洁介质7的清洁剂供应以及驱动器19的运行。此外,洗地机29具有控制器37,其控制洗地机27的功能并能够与清洁设备1的控制器13相互影响、配合和/或取代控制器13。
图3示出了振动(实线)以及由用户感知的振动(虚线)的强度的示例性变化与清洁介质7的湿度的关系,其在所示示例中表示为加速度。可清楚地看出,振动强度与清洁介质7的湿度之间的关系、感知的振动与清洁介质7的湿度之间的关系、大约在清洁介质7的中间湿度处的振动强度的最小值以及能够在清洁介质7的更小的湿度处确定的由用户感知的振动的最小值。
- 一种基于湿度补偿模型的物质识别方法、装置及存储介质
- 用于洗涤设备的待清洗物干湿度检测方法和洗涤设备
- 用于洗涤设备的待清洗物干湿度检测方法和洗涤设备
- 具有控制水分湿度的晶体保存设备
- 用于清洁设备的配件以及具有湿度识别装置的清洁设备
- 具有用于湿度检测的检测装置的清洁设备