一种解决铝冷轧机起车纹的自动起车控制系统及应用方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及铝冷轧机技术领域,特别是一种解决铝冷轧机起车纹的自动起车控制系统及应用方法。
背景技术
铝冷轧机在起车轧制时,当带材与轧辊接触时,如果轧辊处于静止状态,带材与轧辊接触瞬间,容易在轧辊上产生接触辊印,轧制过程中辊印会周期性印在带材表面产生起车纹,对于轧制要求表面质量高的产品将无法满足交货要求,因此对于起车控制方法要求很高,这对于操作手的操作水平要求很高,但因为部分操作手经验不够丰富,且每个操作手的操作水平不一,仍时不时产生起车纹缺陷导致产品不合格,这一方面影响产品质量稳定性,另一方面产生起车纹后的轧辊不能使用需要重新磨削,带材也无法满足交货要求,造成成本增加及降低生产效率。
发明内容
有鉴于此,本发明的目的在于提供一种解决铝冷轧机起车纹的自动起车控制系统及应用方法,避免了起车纹的产生,并将各步骤在程序中预制固化,操作手只需按下自动起车按钮,铝冷轧机便会按照预制步骤自动起车生产,避免人为操作不当造成的质量问题。
为实现上述目的,本发明采用如下技术方案:一种解决铝冷轧机起车纹的自动起车控制系统,包括开卷机、偏导辊、板形辊、卷取机、出口光栅、入口光栅、上轧辊以及下轧辊;所述上轧辊的两侧分别设置有第一轴承,所述下轧辊的两侧分别设置有第二轴承;所述第二轴承的下方设置有用于驱动下轧辊沿垂直方向运动的液压缸;所述液压缸的内部设置有位移传感器,通过位移传感器测量出液压缸行程进而计算出上轧辊与下轧辊之间的距离即辊缝值h;还包括液压系统,所述液压系统驱动液压缸移动,所述液压系统包括第一压力传感器以及第二压力传感器;所述第一压力传感器设置于液压系统的操作侧,所述第二压力传感器设置于所述液压系统的传动侧;
还包括轧制的带材以及主机;所述主机连接减速箱,所述减速箱输出的两根轴分别与上轧辊的万向联轴器和下轧辊的万向联轴器连接;通过主机转动同时驱动上轧辊和下轧辊转动;主机带有编码器,通过编码器测量电机转速进而换算出上轧辊和下轧辊的线速度V;上轧辊和下轧辊的入口侧安装有喷杆梁,通过喷杆梁喷射轧制油对带材和轧辊进行润滑。
在一较佳的实施例中,还包括PLC程序控制器、喷嘴控制、第一伺服阀控制器以及第二伺服阀控制器,所述第一伺服阀控制器和第二伺服阀控制器分别控制液压系统的操作侧和传动侧;所述偏导辊、板形辊、开卷机、主机以及卷取机分别连接有一编码器;所述偏导辊、板形辊、PLC程序控制器、开卷机、主机以及卷取机之间依次连接,并通过DP通讯传输信号;所述第一压力传感器、第二压力传感器、喷嘴控制、入口光栅、出口光栅、第一伺服阀控制器、第二伺服阀控制器均连接所述PLC程序控制器。
在一较佳的实施例中,还包括设置在液压系统的操作侧的第一位移传感器以及设置在液压系统的传动侧的第二位移传感器;所述第一位移传感器通过第一MD20B模块连接所述PLC程序控制器,所述第二位移传感器通过第二MD20B模块连接所述PLC程序控制器。
本发明还提供了一种解决铝冷轧机起车纹的自动起车控制系统的应用方法,采用了上述的一种解决铝冷轧机起车纹的自动起车控制系统,包括以下步骤:
步骤S1:铝冷轧机起车条件满足,操作手按下“自动起车”按钮;
步骤S2:给定目标辊缝值h1,h1=入口带材厚度H+5mm;
步骤S3:液压缸开始驱动下轧辊往上运动,喷杆梁同时启动喷油润滑;
步骤S4:当位移传感器检测值h=h1时,液压缸停止往上运动,主机给定目标线速度3m/min开始驱动上轧辊以及下轧辊转动;
步骤S5:当轧辊线速度V=3m/min时,液压缸继续往上移动,直到第一压力传感器以及第二压力传感器检测到压力大于250吨,此时代表轧辊已经压靠到带材;
步骤S6:开卷机和卷取机自动建立张力,主机给定目标线速度15m/min;
步骤S7:当轧辊线速度V=15m/min时,完成自动起车控制,开始轧制带材。
与现有技术相比,本发明具有以下有益效果:本发明通过对铝冷轧机起车的各步骤进行合适控制,并将各步骤在程序中预制固化,操作手只需按下“自动起车”按钮就可完成一键式起车,避免人为操作不当造成的质量问题。经过实践证明,采用该控制方法能够很好解决起车纹产生,在现场得到良好应用。
附图说明
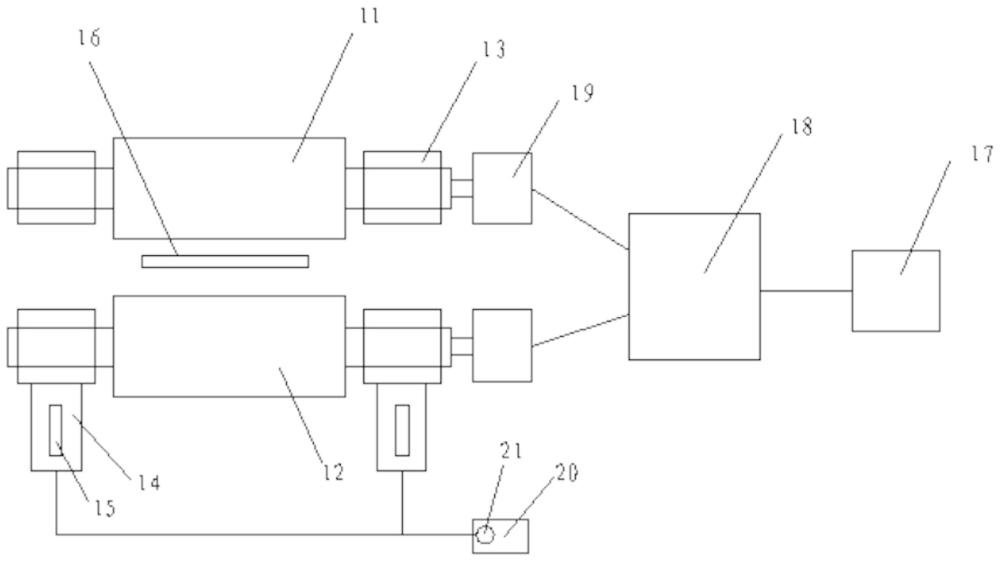
图1为本发明优选实施例的起车控制示意图;
图2为本发明优选实施例的电气信号原理图;
图3为本发明优选实施例的控制程序步序图。
具体实施方式
下面结合附图及实施例对本发明做进一步说明。
应该指出,以下详细说明都是例示性的,旨在对本申请提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式;如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
一种解决铝冷轧机起车纹的自动起车控制系统的应用方法,采用一种解决铝冷轧机起车纹的自动起车控制系统,如图1所示,包括开卷机、偏导辊、板形辊、卷取机、出口光栅、入口光栅、上轧辊11以及下轧辊12;所述上轧辊的两侧分别设置有第一轴承13,所述下轧辊12的两侧分别设置有第二轴承;所述第二轴承的下方设置有用于驱动下轧辊沿垂直方向运动的液压缸14;所述液压缸的内部设置有位移传感器15,通过位移传感器15测量出液压缸14行程进而计算出上轧辊11与下轧辊12之间的距离即辊缝值h;还包括液压系统20,所述液压系统20驱动液压缸14移动,所述液压系统20包括第一压力传感器21以及第二压力传感器;所述第一压力传感器21设置于液压系统20的操作侧,所述第二压力传感器设置于所述液压系统20的传动侧;可通过第一压力传感器21和第二压力传感器检测到液压缸14的压力进而判断出轧辊是否压靠到带材16,根据现场使用当轧辊压靠到带材16时第一压力传感器21和第二压力传感器压力和将会大于250吨。
还包括轧制的带材16以及主机17;所述主机17连接减速箱18,所述减速箱18输出的两根轴分别与上轧辊11的第一万向联轴器19和下轧辊12的第二万向联轴器连接,上轧辊11和下轧辊12的辊径接近,因此上轧辊11和下轧辊12的线速度可认为是一致的;通过主机17转动同时驱动上轧辊11和下轧辊12转动;主机17带有编码器,通过编码器测量电机转速进而换算出上轧辊11和下轧辊12的线速度V;上轧辊11和下轧辊12的入口侧安装有喷杆梁,通过喷杆梁喷射轧制油对带材和轧辊进行润滑。
还包括PLC程序控制器、喷嘴控制、第一伺服阀控制器以及第二伺服阀控制器,所述第一伺服阀控制器和第二伺服阀控制器分别控制液压系统20的操作侧和传动侧;为了使液压缸14移动更为精确,驱动液压缸14升降的阀为伺服阀,传动侧和操作侧各1个。所述偏导辊、板形辊、开卷机、主机以及卷取机分别连接有一编码器;所述偏导辊、板形辊、PLC程序控制器、开卷机、主机以及卷取机之间依次连接,并通过DP通讯传输信号;所述第一压力传感器21、第二压力传感器、喷嘴控制、入口光栅、出口光栅、第一伺服阀控制器、第二伺服阀控制器均连接所述PLC程序控制器。
还包括设置在液压系统20的操作侧的第一位移传感器以及设置在液压系统的传动侧的第二位移传感器;所述第一位移传感器通过第一MD20B模块连接所述PLC程序控制器,所述第二位移传感器通过第二MD20B模块连接所述PLC程序控制器。
本实施例的电气信号原理图如图2所示,用于编程的PLC控制器选用西门子S7-400型控制器,各编码器信号连接到各自传动控制单元,再由传动单元通过DP通讯将信号传输到PLC程序控制器,压力传感器、喷嘴控制、入口光栅、出口光栅、伺服阀控制器信号直接接到PLC程序控制器,传动侧位移传感器与操作侧位移传感器信号先接到MD20B模块,再由模块通过光纤通讯传输到PLC控制器,缩短信号传输时间。
本发明还提供了一种解决铝冷轧机起车纹的自动起车控制系统的应用方法,采用了上述的一种解决铝冷轧机起车纹的自动起车控制系统,参考图3,包括以下步骤:
步骤S1:铝冷轧机起车条件满足,操作手按下“自动起车”按钮;
步骤S2:给定目标辊缝值h1,h1=入口带材厚度H+5mm;
步骤S3:液压缸开始驱动下轧辊往上运动,喷杆梁同时启动喷油润滑;
步骤S4:当第一位移传感器以及第二位移传感器检测值h=h1时,液压缸停止往上运动,主机给定目标线速度3m/min开始驱动上轧辊以及下轧辊转动;
步骤S5:当轧辊线速度V=3m/min时,液压缸继续往上移动,直到第一压力传感器以及第二压力传感器检测到压力大于250吨,此时代表轧辊已经压靠到带材;
步骤S6:开卷机和卷取机自动建立张力,主机给定目标线速度15m/min;
步骤S7:当轧辊线速度V=15m/min时,完成自动起车控制,开始轧制带材。
为了避免操作人员人工操作不流畅并且增加工作量,本实施例通过编程实现自动控制并且在程序中进行固化,操作人员只需按下“自动起车”按钮,铝冷轧机便会按照以上步骤自动起车,无需人工干预,降低人员工作量并节省时间。为防止操作手误按该按钮,本实施例需在自动起车条件满足情况下,才能启动自动起车。其包含以下条件:
主机运行条件满足且处于停止状态;
开卷机和卷取机运行条件满足且处于停止状态;
板形辊和偏导辊运行条件满足且处于停止状态;
液压系统运行正常;
喷嘴系统无故障;
位移传感器和压力传感器无故障;
出入口光栅均有检测到带材;
本发明通过对铝冷轧机起车的各步骤进行合适控制,并将各步骤在程序中预制固化,操作手只需按下“自动起车”按钮就可完成一键式起车,避免人为操作不当造成的质量问题。经过实践证明,采用该控制方法能够很好解决起车纹产生,在现场得到良好应用。
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
- 一种轮式柔性全向转运车控制系统及方法
- 一种城市公交车乘客门控制系统及方法
- 一种机动车与慢行交通冲突解决智能控制系统及方法
- 一种应用于推焦车/装煤车/拦焦车/熄焦车轨道的钢轨的铝热焊方法