一种扶手把微耕机支撑装置及微耕机
文献发布时间:2023-06-19 19:35:22
【技术领域】
本发明涉及微耕机技术领域,具体说是一种扶手把微耕机支撑装置及微耕机。
【背景技术】
已知的,无线电遥控装置是利用无线电信号对远方的机械设备进行控制的遥控设备。无线电遥控装置包括发射和接收两个部分。所述发射部分包括:操作装置、发送装置。所述接收部分包括:接收装置、执行机构。当无线电遥控装置应用在微耕机上,形成发射部分的发射信号被远方的接收设备接收后,可以按照指令驱动微耕机上、对应的机械部件或者电子设备,去完成微耕机各种不同功能的操作。如:直线行走、旋耕作业、转弯、倒退。这种遥控微耕机大大减轻了操作人员的劳动强度,且安全性好。但是,其体形较大,不能在小地块作业使用。
所述扶手把微耕机是带有扶手把的微耕机。所述扶手把是操作人员直接操控微耕机所触及的部件。所述扶手把微耕机是以小型柴油机或汽油发动机或电动机为主动力,所述主动力是指能够带动机具转动的动力。其还包括:机架、变速箱、行走箱及动力输出轴、机具(包括:除草刀、旋耕刀、行走轮)、扶手把组件、防护组件,及可选装的拖挂板、阻力杆。其具有重量轻,体积小的特点,是结构简单的农用机械。扶手把微耕机广泛适用于小块旱地、水田、果园。所述扶手把微耕机需要操作人员直接操纵扶手把,来控制扶手把微耕机作业。其优点:整机小巧、方便。其缺点是:操作人员的劳动强度大,作业时劳累、且操作人员具有安全风险。
所述微耕机包括:扶手把微耕机、遥控微耕机。如何使扶手把微耕机能够改进成为遥控微耕机,从而解脱操作人员的劳苦。这是广大用户希望解决的问题。
【发明内容】
本发明的目的是提供一种扶手把微耕机支撑装置及微耕机。通过在扶手把微耕机上增加支撑装置和其它部件,使扶手把微耕机改进成为遥控微耕机。
所述扶手把微耕机支撑装置,又简称支撑装置,其包括:活动部件、轮轴、支撑轮。其中,所述轮轴大多是两端带有螺纹的园轴,简称螺纹轴。
所述改进成的遥控微耕机包括:延伸机架、支撑装置、遥控装置、电源、扶手把微耕机及刀具组合装配而成。
所述扶手把微耕机改进成为遥控微耕机要解决两个技术问题。问题一:在没有人员扶持下,如何使扶手把微耕机不倾倒。解决这个问题的方法是:在扶手把微耕机周围安装固定支撑轮。经试验结果来看:在扶手把微耕机的前部左右两侧和后部左右两侧分别固定四个支撑轮,且四个支撑轮之间的间距要在1米以上时,支撑扶手把微耕机不倒的效果好。问题二:在没有人员操纵时,如何使扶手把微耕机左、右转向。解决这个问题的方法是:在扶手把微耕机周围固定的四个支撑轮上安装驱动电机。当左、右两侧的驱动电机,为一侧正向转动,另一侧反向转动时,会使改进成的遥控微耕机作业时转向。
为解决上述背景中的技术问题,本发明提供的技术方案是:
一种扶手把微耕机支撑装置,所述支撑装置包括:活动部件、轮轴、电机、支撑轮,所述活动部件上设有活动接触口、活动定位口,所述轮轴设置在活动部件上,所述支撑轮安装在轮轴上,所述电机设置在活动部件上,所述电机带动支撑轮转动。
作为进一步的设置,一种扶手把微耕机支撑装置,所述支撑装置为两套,且两套支撑装置为左右设置,所述两套支撑装置的支撑轮之间的间距大于500毫米。
作为进一步的设置,一种扶手把微耕机支撑装置,所述活动部件为支撑架。
作为进一步的设置,一种扶手把微耕机支撑装置,所述活动定位口为销钉孔。
作为进一步的设置,一种扶手把微耕机支撑装置,所述电机为轮毂电机。
作为进一步的设置,一种扶手把微耕机支撑装置,所述活动接触口为圆轴表面。
所述一种微耕机,包括扶手把微耕机,还包括权利要求1至6任一项所述的扶手把微耕机支撑装置、定位件,所述机架上设有固定接触口、固定定位口,所述活动接触口设置在固定接触口上,所述定位件设置在固定定位口与活动定位口之间,所述活动部件通过定位件固定在机架上。
作为更进一步的设置,一种微耕机,所述固定定位口为销钉孔。
作为更进一步的设置,一种微耕机,所述固定接触口为圆孔。
作为更进一步的设置,一种微耕机,所述定位件为轴销。
所述固定定位口:是指机架上,用于安装定位件的部位。其包括:销钉孔、管套孔、圆孔、台阶。
所述活动定位口:是指活动部件上,用于安装定位件的部位。其包括:销钉孔、管套孔、圆孔、台阶。
所述固定接触口:是指机架上,与活动部件接触的部位。其包括:螺栓螺母、管套孔、圆轴表面、齿盘的凸齿、钢管孔。
所述活动接触口:是指活动部件上,与机架接触的部位。其包括:管套孔、圆轴表面、齿盘的凸齿、圆盘的通孔。
所述活动部件:是指设置在机架上,通过定位件能够拆装或变动设置位置的部件。其包括:支撑架、连接体。
所述机架:是指扶手把微耕机的机架(有说明的除外)。是扶手把微耕机的基体。是支承、安装其它部件,使其它部件保持相对正确的位置,并承受扶手把微耕机其它载荷的基础构件。其包括两部分:主机架部分、延伸机架部分。
所述主机架部分:是指安装主动力的机架。主机架部分简称主机架。
所述延伸机架部分:是固定连接在主机架上,用于安装其它部件的机架。其包括:直杆连接架、曲杆连接架、框架、连接板。所述延伸机架部分简称延伸机架。
所述框架是具有约束性、支撑性,用钢管焊接成的框架。其包括:四边形框架、圆形框架。
所述支撑架:是一种活动部件。是用于安装支撑轮的支架式部件。
所述定位件:是固定机架与活动部件位置的部件。其包括紧固件、电动推杆。
所述电动推杆:是一种将电机的旋转运动转变为推杆的直线往复运动的电力驱动装置。所述电动推杆的定位方式:是指当电机不旋转运动时,推杆处于静止状态。所述静止的推杆,能够阻止推杆两端的活动部件与固定部件的位置发生变化。
所述紧固件:是紧固两个或两个以上零件(或构件)紧固连接成为一件整体时所采用的一类机械零件的总称。紧固件包括:轴销、螺栓、螺母、垫圈、铆钉。
所述扶手把微耕机刀具:是指扶手把微耕机作业时,配备的刀具。其包括:除草刀、旋耕刀、开沟刀。
所述轮子:是用不同材料制成的圆形滚动物体。所述常用的轮子包括:轮毂、辐条、轮辋、橡胶轮。通常情况下,轮子通过轮毂两端的轴承固定安装在轮轴上使用。所述轮轴是用于安装支撑轮的部件。通常轮轴是两端带有螺纹的园轴,简称螺纹轴。
所述支撑轮是用于支撑扶手把微耕机不倾倒的、可前后滚动的轮子。所述支撑轮包括:无动力式支撑轮、电机驱动的支撑轮。所述支撑轮又分为:铁轮、橡胶轮、其它材料的支撑轮。
所述电机:是指依据电磁感应定律实现电能转换或传递的一种电磁装置。
所述电机驱动的支撑轮是指由电机来驱动的支撑轮。所述电机包括:轮毂电机、外置电机。
所述轮毂电机:也被称为支撑轮内装电机,它的最大特点就是将动力装置、传动装置和制动装置都整合一起到轮毂内,得以将支撑装置的机械部分大为简化。
所述外置电机:是指安装在支撑轮的外部,再通过传动部件带动支撑轮转动的电机。
所述轮毂电机驱动的支撑轮组件包括:轮毂、辐条、轮辋、橡胶轮、轮轴、轮毂电机。在轮轴上安装轮毂电机的定子,所述轮毂电机的转子安装固定在轮毂内,所述轮毂通过两端通过轴承安装固定在轮轴上,辐条连接在轮毂与轮辋之间,所述轮辋外侧安装橡胶轮。
所述电机的定子安装在轮轴上,而轮轴设置在活动部件上,此为电机的定子间接设置在活动部件上。
所述一,所述支撑轮组件包括:轮毂、辐条、轮辋、橡胶轮、轮轴、动力组件。所述二,所述支撑装置包括:活动部件、轮轴、动力组件、支撑轮。所述三,所述支撑组合件包括:机架、定位件、活动部件、轮轴、支撑轮。所述一、或二、或三,所包括的范围不同。
所述遥控装置是指通过电磁信号对远距离被控对象进行控制的装置。其包括:操作装置、发送装置、接收装置、执行机构。
所述遥控部件是指遥控装置所包括的零件、部件。
所述连接:是利用不同方式把机械部件连成一体的技术。其包括:直接连接、间接连接、固定连接、活动连接。
所述固定:是指将零件或部件连接后,没有任何相对运动。所述固定连接包括:卡绊连接、螺纹连接、铆接、焊接。
所述活动连接:是指相互连接的相关部件之间能够滑动或转动。所述活动连接包括:铰接、滑动连接。
所述套接:是指管状套(包裹)在轴上的连接方式。
所述间距:是指两者之间的距离。
所述间接:是指经过中间物体发生关系。
所述状态:是指事物表现出来的形态。
所述安装:是指把零件或部件固定在微耕机一定的位置上。
所述电源:是将其它形式的能转换成电能的装置。其包括:发电机、电池。
所述部件,又称机械部件。是指由若干零件装配在一起的组合体。所述零件是指用来装配成微耕机的单个制件。
所述位置:是指物体某一时刻在空间的所在处。
所述设置:是指设立、布置。其包括:直接设置、间接设置。所述设置的方式:包括各种连接。
所述装置:是指微耕机上结构复杂并具有独立功用的电器或机械部件。
所述本发明一种扶手把微耕机支撑装置及微耕机的有益效果是:
所述通过增加延伸机架、电池、遥控装置、支撑装置后,使扶手把微耕机改进成遥控微耕机。此遥控微耕机结构简单,性能稳定。且此遥控微耕机移除上述部件后,又恢复为扶手把微耕机。此两款机型可相互转换,且转换方式简单。此兼顾了使用小巧与操作省力的特点,进而扩大了微耕机的使用范围。所述此遥控微耕机还有以下特点:
1,所述支撑装置能够通过人为下调定位件所在的位置,使支撑杆支撑起遥控微耕机的刀具脱离地面,进而使遥控微耕机在公路上,可通过遥控装置使驱动式支撑轮自行向前行走。实现不启动主动力,也能转换作业场地。
2,所述通过把支撑装置的支撑轮的高低位置调整固定在中部,使其具有平衡支撑作用,能够有效防止遥控微耕机作业时侧翻。且其故障率低,并维修方便。
【附图说明】
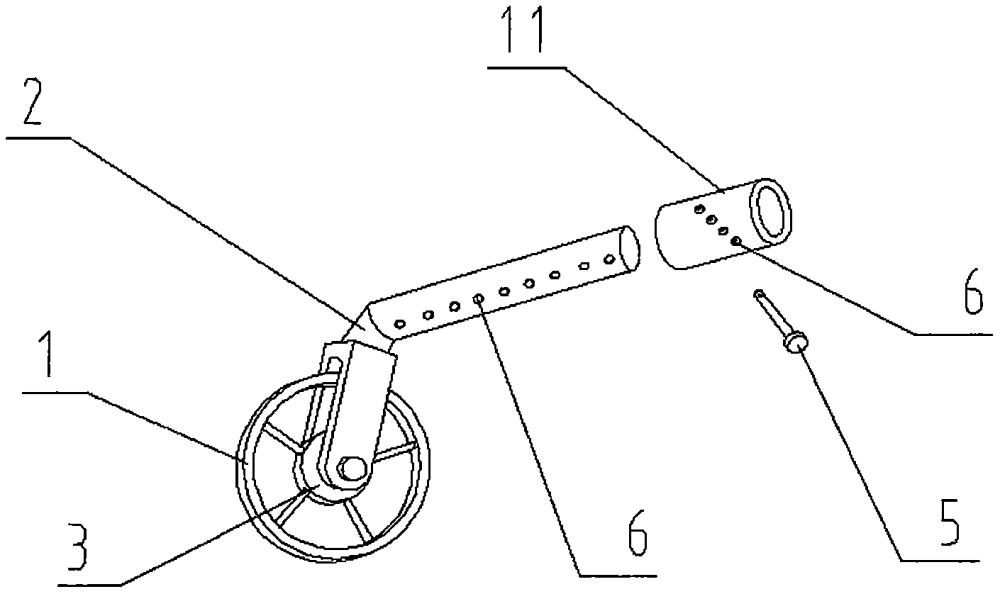
图1是本发明实施例1一套圆管支撑装置结构示意图。
图2是本发明实施例1四套圆管支撑装置排列分布示意图。
图3是本发明实施例1扶手把微耕机结构示意图。
图4是本发明实施例1一种遥控微耕机结构示意图。
图5是本发明实施例2一种支撑架、支撑轮的结构示意图。
图6是本发明实施例2安装在框架上的四套支撑装置排列分布示意图。
图7是本发明实施例2扶手把微耕机结构示意图。
图8是本发明实施例2一种遥控微耕机结构示意图。
图9是本发明实施例3一套齿盘支撑装置结构示意图。
图10是本发明实施例3四套齿盘支撑装置排列分布示意图。
图11是本发明实施例3扶手把微耕机结构示意图。
图12是本发明实施例3一种遥控微耕机结构示意图。
图13是本发明实施例4一套圆盘支撑装置结构示意图。
图14是本发明实施例4四套圆盘支撑装置排列分布示意图。
图15是本发明实施例4扶手把微耕机结构示意图。
图16是本发明实施例4一种遥控微耕机结构示意图。
图中:1,支撑轮;2,支撑架;3,轮毂电机;4,框架;5,轴销;6,销钉孔;7,扶手把;8,电池;9,遥控装置;10,圆挡板;11,圆管;12,内孔;13,活动齿盘;14,固定齿盘;15,螺母;16,活动圆盘;17,固定圆盘
【具体实施方式】
所述本发明通过在扶手把微耕机上增加安装框架,及在框架上安装四套支撑组合件、遥控装置、电源,将其改进成遥控微耕机。
所述安装在框架上的四个支撑轮,对扶手把微耕机的作业刀具有二个状态:
所述一状态:当四个支撑轮通过人为调节到刀具的下侧时,支撑轮触及地面,会支撑起框架。由于扶手把微耕机安装固定在框架内侧,被支撑起的框架带动扶手把微耕机及刀具脱离地面。在此状态下,操作人员可以通过遥控装置操作支撑轮(带轮毂电机)向前行走或向后倒退。进而,通过遥控装置操作此遥控微耕机向前行走或向后倒退运行。
所述二状态:当前侧或后侧支撑轮通过人为调节到刀具上侧时,一侧支撑轮脱离地面,扶手把微耕机刀具会触及地面。此时,扶手把微耕机的刀具及前或后的两个支撑轮接触地面。在此状态下,人们可以通过遥控装置操作刀具进行作业。
在实际应用中,有些扶手把微耕机自带发电机而不需电池供电。因为发电机安装在扶手把微耕机上,而扶手把微耕机安装在框架上,所以发电机是间接安装在框架上。同理,安装在扶手把微耕机上的遥控装置,也是间接安装在框架上。
所述遥控微耕机的转向,是通过操纵两侧的轮毂电机不同向转动,其中的一侧正向转动,另一侧反向转动,来完成遥控微耕机的左转或右转。
所述遥控微耕机的前行或后退,是通过两侧的轮毂电机同时正向转动,来完成遥控微耕机的前行。或通过两侧的轮毂电机同时反向转动,来完成遥控微耕机的后退。
结合附图具体说明本发明的实施方式。
实施例1:
图1是本实施例:一套圆管支撑装置结构示意图。同时,结合图2、图3、图4,具体说明。所述扶手把微耕机的内部结构、传动方式均为现有技术,不在重述。
图4是本实施例一种遥控微耕机结构示意图。其包括:四套支撑组合件、遥控装置9、电源、扶手把微耕机。
所述四套支撑组合件安装在机架的左右两侧的前后位置上,所述支撑组合件是四套结构相同的装置,其均包括:一、圆管11,二、实心圆轴,三、轴销5组合,四、支撑架2,五、支撑轮组件。所述一,所述圆管11是钢管,在圆管11的壁上钻有径向夹角的四个销钉孔6,所述圆管11焊接固定在扶手把微耕机的机架上。所述四个圆管11分别焊接在机架的前部左右两侧和后部左右两侧。所述二,所述实心圆轴是表面光滑的钢质圆轴,其贯穿圆管11的内侧壁,且实心圆轴表面可在圆管11的内侧壁上滑动,所述实心圆轴上均钻有呈轴向排列的九个销钉孔6,所述实心圆轴一端焊接在支撑架2首端。所述通过轴销5贯穿圆管11上与实心圆轴上不同的销钉孔6,来达到调整并固定支撑轮1位置的效果。所述三,轴销5组合包括:轴销5、卡簧垫片。所述轴销5贯穿实心圆轴销钉孔6与圆管销钉孔6,并在轴销5端部安装卡簧垫片防脱落,来达到将实心圆轴固定到圆管11上的目的。所述四,支撑架2由三根方钢管焊接在一起成为Y形叉架。所述Y形叉架的一根方钢管称为首端,所述Y形叉架的另两根方钢管称为尾端。所述Y形叉架的尾端分别钻有通孔。所述Y形叉架首端焊接在实心圆轴一端。所述五,支撑轮组件包括:轮毂、辐条、轮辋、橡胶轮、螺纹轴、轮毂电机3。所述螺纹轴贯穿Y形叉架尾端的两个通孔与两个通孔之间的支撑轮轮毂,所述在轮毂与螺纹轴之间安装轮毂电机3。所述螺纹轴上安装轮毂电机定子,所述轮毂电机转子安装固定在轮毂内,所述轮毂通过两端轴承安装固定在螺纹轴上,辐条连接在轮毂与轮辋之间,所述轮辋外侧安装橡胶轮。且在螺纹轴两端安装垫片螺母紧固。所述通过轮毂电机3正或反转带动支撑轮1前行或后退。
所述当遥控装置来指令操纵轮毂电机3正转时,带动支撑轮1向前行进。所述当遥控装置来指令操纵轮毂电机3反转时,带动支撑轮1向后倒退。所述当遥控装置来指令操纵右侧轮毂电机3正转,左侧轮毂电机3反转时,带动遥控微耕机向左转向。所述当遥控装置来指令操纵右侧轮毂电机反转,左侧轮毂电机正转时,带动遥控微耕机向右转向。通过对支撑轮的轮毂电机3正或反转的遥控操纵,达到遥控微耕机前行或后退及左转向或右转向的效果。
所述遥控装置9包括:遥控器、接收器。所述遥控器由操作人员持有,用于发射指令。所述接收器固定在遥控装置箱体内,所述箱体通过螺栓螺母固定在扶手把微耕机机架上。所述遥控装置9在实际操作中,要完成下列操作:微耕机左转向操作、微耕机右转向操作、微耕机前行操作、微耕机后退操作。
所述轮毂电机3遥控操作,所述四个支撑轮1上均安装有轮毂电机3。当接收器接收到遥控器发出的进退指令时,接收器把指令信号传递给相关电器元件,由电器元件控制两侧的轮毂电机3同时正转,或两侧同时反转,或左侧正转、右侧反转,或左侧反转、右侧正转,通过操纵轮毂电机3的正转或反转来带动遥控微耕机的前行或后退或左、右转向。
所述电池8采用36伏锂电池。所述锂电池固定在锂电池箱体内,所述箱体通过螺栓螺母固定在扶手把微耕机机架上。
所述将扶手把微耕机、遥控装置9、锂电池、轮毂电机3、轴销5、支撑架2、支撑轮1安装固定。并由电池组通过导线给遥控装置9供电,同时,由电池组通过导线及导线连接插口给四个轮毂电机3提供电源。进而形成一种结构简单、体积小的遥控微耕机。作业时,选配好相应的刀具(旋耕刀或除草刀),将扶手把微耕机启动,并调整好支撑轮的高低位置后,即可通过遥控操作来进行旋耕或除草工作。
本实施例的固定接触口为圆管11的内侧壁。固定定位口为圆管11的销钉孔6。活动部件为Y形叉架。活动接触口为实心圆轴表面。活动定位口为实心圆轴的销钉孔6。定位件为轴销5。支撑轮1为轮毂电机3驱动的支撑轮。
实施例2:
图5是本实施例:一种支撑架、支撑轮的结构示意图。同时,结合图6、图7、图8,具体说明。所述扶手把微耕机的内部结构、传动方式均为现有技术,不在重述。
本实施例一种遥控微耕机的框架、四套支撑组合件与实施例1的四套支撑组合件结构不同。其它部分与实施例1结构、作用相同,相同部分不再重述。
所述框架4是由圆钢管焊接而成的圆形环架,且圆形环架下部焊接有内侧板,所述在内侧板中部开有大圆孔,且在大圆孔周围钻有螺栓孔。所述扶手把微耕机的机架下部贯穿大圆孔,且机架通过螺栓紧固在内侧板的螺栓孔上。所述在圆形环架上焊接有四组圆挡板10,所述两个圆挡板10为一组,两个圆挡板10之间焊接有实心圆轴,所述在同组的两个圆挡板10周边均钻有销钉孔。所述四组圆挡板10分别安装在框架4的前部左右两侧和后部左右两侧。
所述四套支撑组合件分别安装在框架4的圆挡板10之间的实心圆轴上,所述支撑组合件是四套结构相同的装置,其均包括:一、实心圆轴,二、轴销5组合,三、支撑架2,四、支撑轮组件。所述一,所述实心圆轴是表面光滑的钢质圆轴,其焊接在同组的两个圆挡板10之间。所述二,轴销5组合包括:轴销、卡簧垫片。所述轴销5贯穿两个圆挡板10的销钉孔6与支撑架2首端的销钉孔6,并在端部安装卡簧垫片防脱落,来达到将支撑架2固定到框架4上的目的。所述三,支撑架2由三根方钢管焊接在一起成为Y形叉架。所述Y形叉架的一根方钢管称为首端,所述Y形叉架的另两根方钢管称为尾端。所述Y形叉架的尾端分别钻有通孔。所述Y形叉架首端的方钢管上钻有内孔12,所述内孔12是通孔,所述Y形叉架首端被安装在两个圆挡板10之间,所述内孔12套接在实心圆轴表面,且能够在实心圆轴上转动。且在Y形叉架首端的方钢管上钻有销钉孔6,所述通过轴销5贯穿支撑架2的销钉孔6与两个圆挡板10上的销钉孔6,来达到固定支撑架2的位置的作用。所述四,支撑轮组件包括:轮毂、辐条、轮辋、橡胶轮、螺纹轴、轮毂电机3。所述螺纹轴贯穿Y形叉架尾端的两个通孔与两个通孔之间的支撑轮轮毂,所述在轮毂与螺纹轴之间安装轮毂电机3。所述螺纹轴上安装轮毂电机定子,所述轮毂电机转子安装固定在轮毂内,所述轮毂通过两端轴承安装固定在螺纹轴上,辐条连接在轮毂与轮辋之间,所述轮辋外侧安装橡胶轮。且在螺纹轴两端安装垫片螺母紧固。所述通过轮毂电机3正或反转带动支撑轮前行或后退。
本实施例的固定接触口为实心圆轴表面。固定定位口为圆挡板10的销钉孔6。活动部件为Y形叉架。活动接触口为Y形叉架首端的内孔12。活动定位口为支撑架2的销钉孔6。定位件为轴销5。支撑轮1为轮毂电机3驱动的支撑轮。
实施例3:
图9是本实施例:一套齿盘支撑装置结构示意图。同时,结合图10、图11、图12,具体说明。所述扶手把微耕机的内部结构、传动方式均为现有技术,不在重述。
本实施例一种遥控微耕机的四套支撑组合件与实施例1的四套支撑组合件结构不同。其它部分与实施例1结构、作用相同,相同部分不再重述。
所述四套支撑组合件焊接固定在机架的左右两侧的前后位置上,所述支撑组合件是四套结构相同的装置,其均包括:一、活动齿盘13,二、固定齿盘14,三、螺栓螺母,四、支撑架2,五、支撑轮组件。所述一,所述活动齿盘13是一侧带有凸齿的钢盘,在钢盘的中心部位钻有一个的通孔,所述钢盘边缘焊接固定在支撑架2首端。所述二,固定齿盘14是一侧带有凸齿的钢盘,在钢盘的中心部位钻有一个的通孔,所述钢盘焊接固定在扶手把微耕机机架上。所述四个固定齿盘14分别焊接在机架的前部左右两侧和后部左右两侧。所述三,螺栓螺母包括:螺栓、螺母15、垫片。所述活动齿盘13的凸齿面与固定齿盘14的凸齿面相结合,且在活动齿盘13与固定齿盘14的中心通孔内贯穿螺栓,安装垫片、螺母15固定。来达到调整并固定活动齿盘13与固定齿盘14位置的效果。所述四,支撑架2由三根方钢管焊接在一起成为Y形叉架。所述Y形叉架的一根方钢管称为首端,所述Y形叉架的另两根方钢管称为尾端。所述Y形叉架的尾端分别钻有通孔。所述Y形叉架首端焊接在活动齿盘13上。所述五,支撑轮组件包括:轮毂、辐条、轮辋、橡胶轮、螺纹轴、轮毂电机3。所述螺纹轴贯穿Y形叉架尾端的两个通孔与两个通孔之间的支撑轮轮毂,所述在轮毂与螺纹轴之间安装轮毂电机3。所述螺纹轴上安装轮毂电机定子,所述轮毂电机转子安装固定在轮毂内,所述轮毂通过两端轴承安装固定在螺纹轴上,辐条连接在轮毂与轮辋之间,所述轮辋外侧安装橡胶轮。且在螺纹轴两端安装垫片螺母紧固。所述通过轮毂电机3正或反转带动支撑轮前行或后退。
本实施例的固定接触口为固定齿盘14的盘面。固定定位口为固定齿盘14的中心通孔。活动部件为Y形叉架。活动接触口为活动齿盘13的盘面。活动定位口为活动齿盘13的中心通孔。定位件为螺栓螺母。支撑轮1为轮毂电机3驱动的支撑轮。
实施例4:
图13是本实施例:一套圆盘支撑装置结构示意图。同时,结合图14、图15、图16,具体说明。所述扶手把微耕机的内部结构、传动方式均为现有技术,不在重述。
本实施例一种遥控微耕机的四套支撑组合件与实施例1的四套支撑组合件结构不同。其它部分与实施例1结构、作用相同,相同部分不再重述。
所述四套支撑组合件焊接固定在机架的左右两侧的前后位置上,所述支撑组合件是四套结构相同的装置,其均包括:一、活动圆盘16,二、固定圆盘17,三、螺栓螺母15,四、支撑架2,五、支撑轮组件。所述一,所述活动圆盘16是钢盘,钢盘周边钻有柒个的通孔,所述钢盘边缘焊接固定在支撑架2首端。所述二,所述固定圆盘17是钢盘,钢盘周边钻有柒个的通孔,所述钢盘中部焊接固定在扶手把微耕机的机架上。所述四个固定圆盘17中部分别焊接在机架的前部左右两侧和后部左右两侧。所述三,螺栓螺母包括:三个螺栓、三个螺母15、三个垫片。所述活动圆盘16与固定圆盘17相结合,且在活动圆盘16与固定圆盘17的周边的不同的三个通孔内,分别贯穿螺栓,安装垫片、螺母15固定。来达到调整并固定活动圆盘16与固定圆盘17位置的效果。所述四,支撑架2由三根方钢管焊接在一起成为Y形叉架。所述Y形叉架的一根方钢管称为首端,所述Y形叉架的另两根方钢管称为尾端。所述Y形叉架的尾端分别钻有通孔。所述Y形叉架首端焊接在活动圆盘16上。所述五,支撑轮组件包括:轮毂、辐条、轮辋、橡胶轮、螺纹轴、轮毂电机3。所述螺纹轴贯穿Y形叉架尾端的两个通孔与两个通孔之间的支撑轮轮毂,所述在轮毂与螺纹轴之间安装轮毂电机3。所述螺纹轴上安装轮毂电机定子,所述轮毂电机转子安装固定在轮毂内,所述轮毂通过两端轴承安装固定在螺纹轴上,辐条连接在轮毂与轮辋之间,所述轮辋外侧安装橡胶轮。且在螺纹轴两端安装垫片螺母紧固。所述通过轮毂电机正或反转带动支撑轮前行或后退。
本实施例的固定接触口为固定圆盘17的盘面。固定定位口为固定圆盘17的通孔。活动部件为Y形叉架。活动接触口为活动圆盘16的盘面。活动定位口为活动圆盘16的通孔。定位件为螺栓螺母15。支撑轮1为轮毂电机3驱动的支撑轮。
所述上述实施例中的扶手把微耕机改装成的遥控微耕机在实际应用中,均能正常顺畅使用作业。同时,所述遥控微耕机还能在拆除四套支撑装置或将四套支撑装置转动、固定到机架上部后,可恢复为扶手把微耕机的人工操作,进行作业使用。通过扶手把微耕机与改装成的遥控微耕机的相互转换,增加了微耕机的适用性。且上述增加或拆除的工序简单,操作方便。
本发明未详述部分为重复叙述或者现有技术。
- 一种微耕机手把的旋转保护机构及微耕机
- 一种微耕机手把旋转限位结构及微耕机