一种多节可自由构型水面垃圾聚拢装置
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及生态环境保护及治理技术领域,尤其涉及一种多节可自由构型水面垃圾聚拢装置。
背景技术
近年来,随着社会经济发展水平的提高,对水域环境造成了严重污染,因此水域环保问题也越来越受到重视。由于水面为露天公共环境,垃圾丢弃成为了水面环保主要面临的问题,江河、湖泊、港口甚至近海的水面漂浮垃圾的污染日益严重。目前针对于水面漂浮垃圾的清理,通常采用的方法是工作人员沿岸人工打捞,对于漂浮于水面中心的垃圾,则需要工作人员乘船打捞,这导致了水面垃圾清理效率过低的现状。
发明内容
本发明目的在于针对现有技术的缺陷,提供一种用于水面垃圾聚拢装置,该装置水面漂浮垃圾聚拢,并运送至水边指定位置。该装置为多节重复结构,可根据垃圾聚拢要求自由构型。
为解决上述技术问题,本发明提供技术方案如下:
一种多节可自由构型水面垃圾聚拢装置,其特征在于:包括水面漂浮可移动单节、上位机,所述水面漂浮可移动单节之间首尾依次活动连接,所述上位机能够与水面漂浮可移动单节无线通讯并控制水面漂浮可移动单节在水面的位置和姿态。
进一步的,所述水面漂浮可移动单节包括密封外壳、齿轮泵、控制器,所述齿轮泵和控制器设置在所述密封外壳内,所述控制器与齿轮泵电连接,所述上位机与控制器之间无线通讯连接,控制器能够将水面漂浮可移动单节的位置和姿态反馈给上位机,上位机能够通过控制器控制齿轮泵调节水面漂浮可移动单节的位置和姿态。
进一步的,所述齿轮泵包括前齿轮泵、中齿轮泵和后齿轮泵,所述齿轮泵上均连接有两个进出水口,所述进出水口从所述密封外壳的底部延伸出来。
进一步的,所述前齿轮泵上的进出水口包括前左进出水口和前右进出水口,所述中齿轮泵上的进出水口包括中前进出水口和中后进出水口,所述后齿轮泵上的进出水口包括后左进出水口和后右进出水口,所述前左进出水口和前右进出水口呈左右对称布置,所述中前进出水口和中后进出水口呈前后对称布置,所述后左进出水口和后右进出水口呈左右对称布置。
进一步的,所述进出水口和密封外壳之间采用焊接或静密封。
进一步的,所述密封外壳的前后两端分别设置有连接轴和万向节,相邻的水面漂浮可移动单节之间通过所述连接轴和万向节活动连接。
进一步的,所述控制器和上位机之间通过无线通讯模块相互通讯。
进一步的,所述水面漂浮可移动单节首尾相连形成一U型结构。
与现有技术相比,本发明的有益效果是:1)本发明所提出的装置为单节的重复,制作所需的零部件少;2)本发明所提出的装置的长度可以任意改变,以适应水面大小的要求;3)本发明所提出的装置的构型可以任意设定,以适应垃圾聚拢的需求。
附图说明
图1为本发明实施例整体结构示意图;
图2为本发明实施例的水面漂浮可移动单节结构示意图;
图3为本发明实施例的水面漂浮可移动单节内部结构示意图;
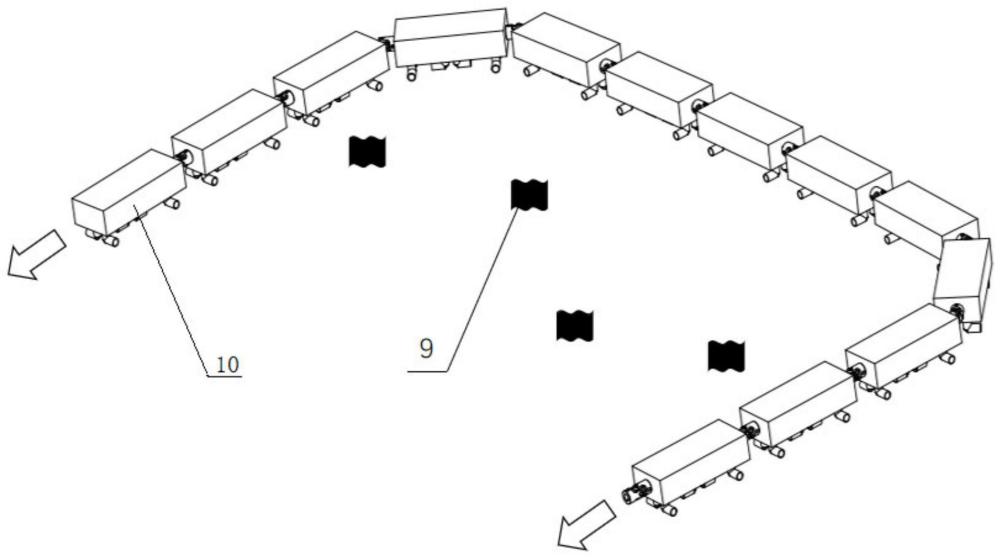
图4为本发明实施例垃圾聚拢过程示意图。
其中:1—密封外壳,2—万向节,3—连接轴,4—前齿轮泵,41—前右进出水口,42—前左进出水口,5—中齿轮泵,51—中前进出水口,52—中后进出水口,6—后齿轮泵,61—后右进出水口,62—后左进出水口,7—控制器,8—上位机,9—垃圾,10—水面漂浮可移动单节。
具体实施方式
为了加深本发明的理解,下面我们将结合附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
图1-3示出了一种多节可自由构型水面垃圾聚拢装置的具体实施例,包括水面漂浮可移动单节10和上位机8。其中,图2给出了水面漂浮可移动单节10的外形图,每个水面漂浮可移动单节10有一个密封外壳1,用于将水面漂浮可移动单节10内部结构和水体隔开,密封外壳外侧前后两端分别固定连接有一个连接轴3和一个万向节2。如图1所示,相邻的水面漂浮可移动单节10之间通过万向节2和连接轴3依次首尾连接起来,并保证相邻水面漂浮可移动单节10之间可以自由转动,以变化形成设定的构型。
图3示出了水面漂浮可移动单节10密封外壳内部的结构。密封外壳内部内设置有3个齿轮泵,分别为安装在水面漂浮可移动单节10前部的前齿轮泵4、安装在水面漂浮可移动单节10中部的中齿轮泵5和安装在水面漂浮可移动单节10后部的后齿轮泵6。每个齿轮泵均连通有2个进出水口,进出水口穿过密封外壳1后浸没在水体中,进出水口和密封外壳1之间采用焊接或静密封。前齿轮泵4的进出水口在密封外壳1外呈左右对称布置,分别为水平向右的前右进出水口41和水平向左的前左进出水口42。中齿轮泵5的进出水口在密封外壳1外呈前后对称布置,分别为水平向前的中前进出水口51和水平向后的中后进出水口52。后齿轮泵6的进出水口在密封外壳1外呈左右对称布置,分别为水平向右的后右进出水口61和水平向左的后左进出水口62。
前齿轮泵4正转时,从前右进出水口41吸水,从前左进出水口42排水,从而产生一个作用在水面漂浮可移动单节10前部水平往右的力。前齿轮泵4反转时,从前左进出水口42吸水,从前右进出水口41排水,从而产生一个作用在水面漂浮可移动单节10前部水平往左的力。中齿轮泵5正转时,从中前进出水口51吸水,从中后进出水口52排水,从而产生一个作用在水面漂浮可移动单节10上沿轴线往前的力。中齿轮泵5正转时,从中后进出水口52吸水,从中前进出水口51排水,从而产生一个作用在水面漂浮可移动单节10上沿轴线往后的力。后齿轮泵6正转时,从后右进出水口61吸水,从后左进出水口62排水,从而产生一个作用在水面漂浮可移动单节10后部水平往右的力。后齿轮泵6反转时,从后左进出水口62吸水,从后右进出水口61排水,从而产生一个作用在水面漂浮可移动单节10后部水平往左的力。通过协调水面漂浮可移动单节10的中前齿轮泵4和后齿轮泵6的正反转,可以实现水面漂浮可移动单节10绕垂直轴的旋转,或者左右平移。通过控制水面漂浮可移动单节10的中齿轮泵5的正反转,可以实现水面漂浮可移动单节10前后平移。
密封外壳内设有控制器7。控制器7具有位置和姿态传感器,以感知水面漂浮可移动单节10的位置和姿态。控制器7具有无线通讯模块,用于和上位机8进行无线通讯。上位机8根据垃圾聚拢要求计算出每个水面漂浮可移动单节10的位置和姿态,并将位置和姿态数据发送给对应水面漂浮可移动单节10的控制器7。控制器7控制前齿轮泵4、中齿轮泵5、后齿轮泵6的正负转,将水面漂浮可移动单节10的位置和姿态调整到目标值。
图4为垃圾聚拢过程示意图。依据上位机8的要求,各个水面漂浮可移动单节10由控制器7控制运动到指定的位置,整体形成U型,将水面漂浮的垃圾9包围起来。然后各水面漂浮可移动单节10之间协调运动,保持U型构型,整体运动到水边指定位置,从而将水面漂浮的垃圾9聚拢并运送到水边指定位置。
上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所作的任何等效变化或修饰,均应落入本发明的保护范围之内。
- 一种环保用水面垃圾收集粉碎装置
- 一种水面垃圾清理装置以及智能洁水系统
- 一种水产养殖用水面垃圾收集装置
- 一种方便对水面垃圾进行收集的清理装置
- 一种可聚拢水面垃圾的打捞无人船及其使用方法
- 一种可聚拢水面垃圾的打捞无人船及其使用方法