穿刺器、手术机器人及其执行手术的方法
文献发布时间:2023-06-19 19:37:02
技术领域
本申请涉及医疗器械领域,特别是涉及一种穿刺器、手术机器人和其执行手术的方法。
背景技术
微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。
随着科技的进步,微创手术机器人技术逐渐成熟,并被广泛应用。微创手术机器人通常包括主操作台及从操作设备,主操作台用于根据医生的操作向从操作设备发送控制命令,以控制从操作设备,从操作设备用于响应主操作台发送的控制命令,并进行相应的手术操作。手术器械与从操作设备的驱动装置,如机械臂连接,用于执行外科手术,手术器械可以包括用于执行手术操作的末端执行器,以及预先用于穿刺身体手术位置的穿刺器。
由于人体皮肤是柔性的,穿刺器插入人体后会自然下垂,形成一个倾斜角度。现有穿刺器与机器人机械臂上的末端执行器插入身体腔道的准备阶段需要经过多次调整,最终对齐后才能将末端执行器经穿刺器插入身体,造成手术效率低,病人等待时间长,加重了医生和患者的负担。
发明内容
基于此,为解决上述问题,本申请提供一种穿刺器、手术机器人和其执行手术的方法。
本申请实施例的第一方面提供一种穿刺器,用于穿刺身体手术位置,所述穿刺器连接有位置传感器,所述位置传感器用于感应并输出所述穿刺器的位置信息。
在一个具体的实施例中,所述位置传感器为陀螺仪。陀螺仪为一种有源传感器,在其它实施例中,陀螺仪也可以替换为磁性传感器。
在另一个具体的实施例中,所述位置传感器为摩擦纳米发电机。摩擦纳米发电机为一种无源传感器,也就是不需要外加电源,是自供电传感装置的一种。
本申请实施例的第二方面也提供一种穿刺器,用于穿刺身体手术位置,所述穿刺器设置有位置传感器,所述位置传感器用于感应并输出所述穿刺器的位置信息,所述位置传感器包括设置在所述穿刺器的第一位置的第一摩擦纳米发电机,设置在所述穿刺器的第二位置的第二摩擦纳米发电机,以及可以在所述第一位置和第二位置之间滚动触发所述第一和第二摩擦纳米发电机分别发电的球体,所述第一和第二摩擦纳米发电机产生电能时刻的时间差标定出所述穿刺器的倾斜位置信息。
在一个具体的实施例中,所述第一摩擦纳米发电机和第二摩擦纳米发电机之间设有球体坠落轨道,所述球体坠落时推动所述第一摩擦纳米发电机和第二摩擦纳米发电机分别发电。
在一个优选的实施例中,所述穿刺器主体的外壁对应所述第一位置设置有一个释放器,所述释放器环绕所述穿刺器主体,所述释放器间隔设置多个所述第一摩擦纳米发电机,所述穿刺器主体的外壁对应所述第二位置设置多个所述第二摩擦纳米发电机,所述球体和球体坠落轨道分别包括多个,其中一个所述球体、一个坠落轨道、一个第一摩擦纳米发电机和一个第二摩擦纳米发电机形成一个工作组。
优选地,所述释放器(第一摩擦纳米发电机)设置在所述穿刺器主体的上方位置,所述第二摩擦纳米发电机设置在所述穿刺器主体的下方位置,它们间隔的距离,也就是所述球体坠落轨道的轨道长度可以是10-30mm之间。
在一个具体的实施例中,每个所述第一和第二摩擦纳米发电机分别由一第一摩擦副和一第二摩擦副组成,所述球体沿所述球体坠落轨道坠落时每个所述第一摩擦副和第二摩擦副摩擦产生电能。
在一个具体的实施例中,进一步包括球体坠落平面,所述释放器可转动,所述释放器形成球体释放平面,所述球体坠落轨道连接所述球体释放平面和球体坠落平面,所述释放器转动时所述球体推动所述第一摩擦纳米发电机的第一摩擦副相对第二摩擦副摩擦,所述球体坠落到所述球体坠落平面时,所述球体坠落平面通过连杆推动所述第二摩擦纳米发电机的第一摩擦副相对第二摩擦副摩擦。
在一个优选的实施例中,所述球体坠落轨道呈自所述球体释放平面到所述球体坠落平面的向外辐射的形状,且向外辐射的角度为锐角,优选地在3-10度之间。
在一个具体的实施例中,所述球体坠落平面通过弹簧连接到所述穿刺器主体的外壁。
在一个具体的实施例中,每个所述第一摩擦副和第二摩擦副分别由一聚合物薄膜和一导电金属层组成,每个所述第一摩擦副和对应的第二摩擦副摩擦时所述第一摩擦副的聚合物薄膜与对应的第二摩擦副的聚合物薄膜滑动摩擦。所述聚合物薄膜的材料包括得失电子能力差异较大的聚合物材料,所述导电金属层的材料选自金属材料。聚合物材料例如选自聚酰亚胺、聚四氟乙烯、聚对苯二甲酸乙二酯和聚二甲基硅氧烷的一种或几种组合,所述导电金属例如选自铜或铝中的一种或其合金。
本申请第二方面提供一种手术机器人,所述手术机器人包括一机械臂,由所述机械臂驱动的手术器械,以及用于穿刺身体手术位置的穿刺器,所述手术器械具有末端执行器,所述穿刺器连接有位置传感器,所述位置传感器用于感应所述穿刺器的位置,并将获取的穿刺器位置信息反馈给一处理器,所述处理器根据所述位置信息输出相应的电信号反馈给所述机械臂,所述机械臂根据该反馈的电信号移动至与所述穿刺器耦接的位置以使所述手术器械的末端执行器在与所述穿刺器呈同一水平线的位置而穿过所述穿刺器进入身体进行手术。
本申请第三方面提供一种手术机器人执行手术的方法,其包括:
使用一连接有位置传感器的穿刺器穿刺身体手术位置,所述位置传感器用于感应并输出所述穿刺器的位置信息;
使用一处理器接收所述位置传感器输出的所述穿刺器的位置信息,并输出相应的电信号;
使用机械臂驱动手术器械的末端执行器执行手术的方式,所述机械臂接收所述处理器输出的电信号并根据该电信号移动至与所述穿刺器耦接的位置,以使所述手术器械的末端执行器在与所述穿刺器呈同一水平线的位置而穿过所述穿刺器进入身体进行手术。
本申请的穿刺器、手术机器人和其执行手术的方法至少具有以下有益效果:穿刺器带有位置传感器,因此穿刺器穿刺人体皮肤后自然下垂的位置可以被获得,因此手术机器人便可驱动机械臂移动至与所述穿刺器耦接的位置,如此使手术机器人机械臂和穿刺器在手术器械插入人体腔道前容易处于同一水平线,然后医生再将手术器械穿过穿刺器,机械臂便可驱动手术器械执行手术,本申请的穿刺器就是将医生插入器械的调整周期缩短,减少了医生和患者在前期准备的耗时,提升了手术体验。
附图说明
图1为本申请的实施例提供的手术机器人示意图。
图2为本申请提供的第一实施方式的穿刺器的结构示意图;
图3为本申请提供的第二实施方式的穿刺器的结构示意图;
图4为图3的一内部俯视示意图;
图5为图4的一个展开结构示意图;
图6为图5中的一个摩擦纳米发电机的发电原理示意图;
图7是图4的穿刺器在竖直状态时球体、球体释放平面、球体坠落轨道示意图和球体坠落平面之间位置关系的原理示意图;
图8是图4的穿刺器在一倾斜状态时球体、球体释放平面、球体坠落轨道示意图和球体坠落平面之间位置关系的原理示意图。
图中各元件标号如下:
从操作设备10、机械臂11、器械12、穿刺器13、位置传感器14、处理器15、电信号接收装置16、穿刺器主体131、释放器132、手柄133、导线罩134、滚落窗口140、第一摩擦纳米发电机141、第二摩擦纳米发电机142、球体143、球体坠落轨道144、第一摩擦副145、第二摩擦副146、球体坠落平面147、球体释放平面149、连杆148、弹簧150、聚合物薄膜151、导电金属层152。
具体实施方式
为了便于理解本申请,下面将参照相关附图对本申请进行更全面的描述。附图中给出了本申请的较佳实施方式。但是,本申请可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本申请的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。当一个元件被认为是“耦合”另一个元件,它可以是直接耦合到另一个元件或者可能同时存在居中元件,本文所谓的“接合”是指两个元件具有动力传输的联接。本文所使用的术语“垂直的”、“水平的”、“左”、“右”、“上方”、“下方”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式,应理解的是,这些与空间相关的术语旨在除了附图中描绘的取向之外还涵盖设备在使用中或在操作中的不同取向,例如,如果设备在附图中被翻转,则描述为在其他元件或特征“下方”或“之下”的元件或特征将被取向为在其他元件或特征“上方”。因此,示例术语“下方”可以包括上方和下方两种取向。
本文所使用的术语“远端”、“近端”作为方位词,该方位词为介入医疗器械领域惯用术语,其中“远端”表示手术过程中远离操作者的一端,“近端”表示手术过程中靠近操作者的一端。本文所使用的“耦合”可以被广义地理解为其中两个或更多物体以一种方式被连接到任何事件,改方式允许绝对耦合的物体彼此在一起进行操作,使得物体之间至少在一个方向上没有相对移动,例如突出物和凹槽的耦合,两者可以在径向相对移动但不能在轴向相对移动。
术语“器械”在文中被用来描述医疗设备,该医疗设备用于插入患者身体并用于执行外科手术或诊断程序,该器械包括末端执行器,末端执行器可以是用于执行外科手术相关的外科手术工具,例如电烧灼器、钳夹器、吻合器、剪割器、成像设备(例如内窥镜或超声探头)以及类似物。末端执行器还可以提供铰接部件(例如关节组件),使得末端执行器的位置和取向能够以相对于器械轴一个或多个机械自由度被操控而运动。进一步地,末端执行器包括还包括功能性机械自由度,例如打开和闭合的钳夹。器械还可以包括可以被外科手术系统更新的存储信息,借此该存储系统可以提供器械与一个或多个系统元件之间的单向或双向通信。本申请的手术器械进一步使用一穿刺器,用于穿刺身体,如人体的手术位置。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本申请。本文所使用的术语“及/或”和“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本申请一个实施例的手术机器人如图1所示,手术机器人包括从操作设备10及主操作设备(图未示),从操作设备10位于患者一侧用于执行外科手术,其中从操作设备10包括多个机械臂11和安装在机械臂11上的手术器械12。机械臂11被配置成通过多个大臂被支柱所述支撑,在其他的一些实施例中,从操作设备10的机械臂11也可以被安装在墙上或天花板上。手术器械12包括末端执行器,末端执行器可以是用于执行手术操作的电烧灼器、钳夹器、吻合器、剪割器等,也可以是获取影像的相机或者其他外科器械,。
手术机器人通常还包括使操作者能够从患者身体外部观察手术部位的影像系统部分(未示出)。该影像系统不同通常包括具有视频图像采集功能(例如具有图像获取功能的手术器械12和用于显示被采集图像的一个或多个视频显示设备。一般地,具有图像获取能的手术器械12包括将获取患者身体内图像的一个或多个成像传感器(例如CCD或CMOS传感器)的光学器件。该一个或多个成像传感器可以被放置在的具有图像获取能的手术器械12远端处,并且该一个或多个传感器产生的信号可以沿电缆或通过无线传输以在视频显示设备上处理和显示。
主操作设备(图未示)位于医生操作者一侧,主操作设备用于根据操作者的操作向从操作设备10发送控制命令和显示从操作设备10获取的影像,操作者通过主从操作设备20可以观察到影像系统提供的患者体内的三维立体成像,操作者通过观察患者体内三维的影像,能以沉浸式的感觉通过操作主操作设备控制从操作设备10执行相关操作(例如执行手术或获取患者体内影像)。
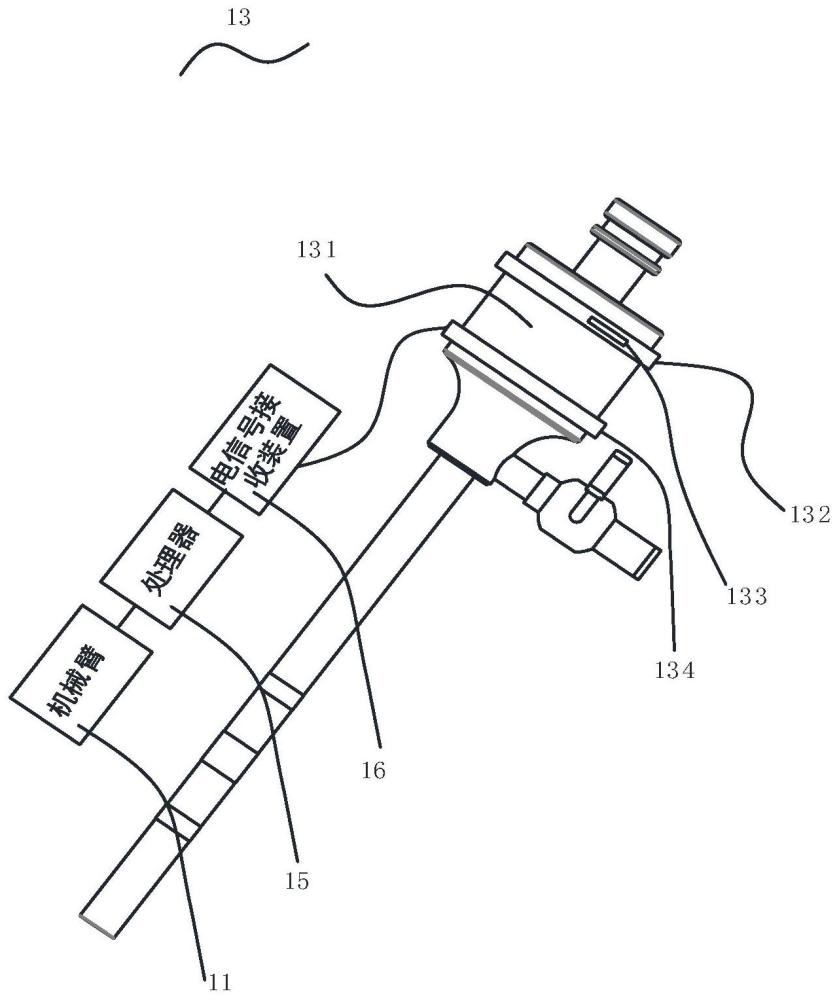
本申请的手术机器人的实施例进一步使用一穿刺器13,用于预先穿刺身体,如人体的手术位置,手术器械12的末端执行器穿过穿刺器13而执行手术。特别地,本申请的实施例提供的穿刺器13连接有一位置传感器14(见图2-3),所述位置传感器14用于感应并输出所述穿刺器13的位置信息。
请结合参阅图2,在本申请的第一实施方式中,所述位置传感器14固定连接在所述穿刺器13的外壁,其为一陀螺仪。所述陀螺仪为一种有源的运动传感器,其可以由一外部电源供电。由于人体皮肤是柔性的,穿刺器13插入人体后会自然下垂,形成一个倾斜角度。当穿刺器13插入人体后自然下垂到某位置时,陀螺仪会通过自我调节,使陀螺仪中的转子保持原有平衡,其自身的角运动信息可以反应穿刺器13的倾斜状况,当穿刺器13与水平面呈一定角度时,陀螺仪会感应到穿刺器13的倾斜情况,并将获取的倾斜位置信息输出,如此即可知所述穿刺器13下垂后的位置信息。所述位置传感器14输出的所述穿刺器13的位置信息的电信号可以由一个处理器15接收,或者先经过一个电信号接收装置16,再传递到处理器15,然后处理器15处理后传递给机器人的机械臂11,所述机械臂11接收所述处理器15输出的电信号并根据该电信号移动至与所述穿刺器13耦接的位置,以使所述手术器械12的末端执行器在与所述穿刺器13呈同一水平线的位置而穿过所述穿刺器13进入身体进行手术。
请参阅图3,在本申请的第二实施方式中,所述位置传感器14为自供电传感装置,即不由外部电源供电,其为摩擦纳米发电机。具体地,所述穿刺器13包括穿刺器主体131和设置在所述穿刺器主体131的外壁内第一位置的释放器132。所述位置传感器14包括第一摩擦纳米发电机141和第二摩擦纳米发电机142。第一摩擦纳米发电机141设置在所述释放器132内,第二摩擦纳米发电机142设置在所述穿刺器主体131的外壁内第二位置。所述释放器132的位置,也就是所述第一摩擦纳米发电机141与所述第二摩擦纳米发电机142的位置之间有一定距离,所述第一和第二摩擦纳米发电机141,142产生电能时刻的时间差可以标定出穿刺器13的倾斜位置信息。
请一并参阅图4和图5,具体地,位置传感器14进一步包括球体143,所述第一摩擦纳米发电机141和第二摩擦纳米发电机142之间设有球体坠落轨道144,所述球体143坠落时推动所述第一摩擦纳米发电机141和第二摩擦纳米发电机142分别发电。本实施例中,所述球体143为铁球。
在一个优选的实施方式中,所述释放器132可以环绕所述穿刺器主体131的上方位置,所述释放器132间隔设置多个所述第一摩擦纳米发电机141,所述穿刺器主体131的下方位置间隔设置多个所述第二摩擦纳米发电机142,所述球体143和球体坠落轨道144分别包括多个,其中一个所述球体143、一个坠落轨道144、一个第一摩擦纳米发电机141和一个第二摩擦纳米发电机142形成一个工作组。
具体地,每个所述第一和第二摩擦纳米发电机141,142分别由一第一摩擦副145和一第二摩擦副146组成,所述球体143沿所述球体坠落轨道144坠落时每个所述第一摩擦副145和第二摩擦副146摩擦产生电能。
本实施例中,所述释放器132相对所述穿刺器主体131可转动,且所述释放器132形成一个球体释放平面149,所述位置传感器14进一步包括球体坠落平面147,所述球体坠落轨道144连接所述球体释放平面149和球体坠落平面147。所述释放器132转动时所述球体143推动所述第一摩擦纳米发电机141的第一摩擦副145相对第二摩擦副146摩擦,所述球体143坠落到所述球体坠落平面147时,所述球体坠落平面147通过连杆148推动所述第二摩擦纳米发电机142的第一摩擦副145相对第二摩擦副146摩擦。
具体地,所述释放器132可以设置一个手柄133来方便医生手持手柄133转动所述释放器132。所述释放器132转动之前,所述球体143处于球体释放平面149的初始位置,在该初始位置,所述球体143位于相邻两个第一摩擦纳米发电机141之间,更加具体地,所述球体143位于一个第一摩擦纳米发电机141的第二摩擦副146与相邻的一个第一摩擦纳米发电机141的第一摩擦副145之间。
所述手柄133带动所述释放器132转动时,所述球体143推动所述第一摩擦纳米发电机141的第一摩擦副145向第二摩擦副146方向移动而形成摩擦而发电产生电能。所述第一摩擦纳米发电机141的第一摩擦副145向第二摩擦副146方向移动时,相邻两个所述第一摩擦纳米发电机141之间形成球体143滚落窗口140,所述球体143沿球体坠落轨道144滚落到球体坠落平面147,球体坠落平面147受到重力下压,从而推动连杆148,连杆148连接所述第二摩擦纳米发电机142的第一摩擦副145,从而所述第二摩擦纳米发电机142的第一摩擦副145向第二摩擦副146方向移动形成摩擦而发电产生电能。由于球体143从穿刺器13的上方位置沿球体坠落轨道144滚落到下方位置,下落过程机械能转化为电能,所述第一和第二摩擦纳米发电机141,142产生电能时刻的时间不同,该时间差可以标定出穿刺器13的倾斜角度信息。所述球体坠落轨道的轨道长度可以是10-30mm,例如15mm。
请再次参阅图4,具体实施过程中,可根据穿刺器13的外径大小选择配置的第一及第二摩擦纳米发电机141,142的机组数量,第一及第二摩擦纳米发电机141,142的机组数量越多,获得的测量结果越精确,第一及第二摩擦纳米发电机141,142的机组越少,单块机组可以获得更大的面积,产生的电荷量更大,更有利于电信号的接收。由于穿刺器13中的空间恒定,第一及第二摩擦纳米发电机141,142的机组数量需要在监测结果的精准度与接收信号间取平衡点,以直径26mm的穿刺器为例,可以圆周方向上方位置均匀排布12组第一摩擦纳米发电机141,圆周方向下方位置均匀排布12组第二摩擦纳米发电机142。既可以保证定位的相对准确,也可以保证电信号的接收强度。
请一并参阅图7和图8,优选地,所述球体坠落轨道144呈自所述球体释放平面149到所述球体坠落平面147的向外辐射的形状,且向外辐射的角度θ(即球体坠落轨道144与垂直线之间的夹角θ)为锐角,优选地在3-10度之间。由于角度θ不同,球体143坠落(参见图7和图8中的箭头)到球体坠落平面147的时间会有区别,可以通过不同第二摩擦纳米发电机142的摩擦副的电信号反馈的先后顺序,判断出球体143与不同球体坠落平面147接触的时间,穿刺器13插入身体手术位置后相对竖直状态或相对身体手术位置的倾斜角度可以通过坠落时间与释放时间计算的差值标定。具体实施时,可以所有球体143质量完全一样,球体坠落轨道144角度越垂直于手术身体肚皮,垂直方向上的重力势能越大,下落的速度也会越快。具体地,若一对第一及第二摩擦纳米发电机141,142的信号间隔越短,说明球体143对应的球体坠落轨道144相对地面(肚皮)越垂直(如图7的竖直状态),则那一组第二摩擦纳米发电机142处在更低的位置;若一对第一及第二摩擦纳米发电机141,142信号间隔越长,球体143对应的球体坠落轨道144越倾向于平行地面(如图8的倾斜状态);若那一组摩擦纳米发电机不产生信号,则说明穿刺器13已与地面平行,或者倒置,如此生成一个代表穿刺器13的姿态的位置信息的信号。
举例来说,操作人员在a时刻转动释放环132,电信号接收装置16记录该时刻的时间,球体132从第一摩擦纳米发电机141下落,b1时刻到达相对地面最接近90度(即球体坠落轨道144与垂直线之间的夹角θ为最接近0度)的球体坠落平面147触发第一摩擦纳米发电机142发电,b2时刻到达相对地面最第二接近90度的球体坠落平面147,依次类推。使用b1减去a,得到球体坠落总耗时H1,由于各球体坠落轨道工况相同,球体质量也相同,仅相对地面(肚皮)角度不同,可以通过前期数据,将H1与轨道角度进行标定,可得出该轨道相对于地面的角度。b2减去a获得H2,以及H3等轨道的时间及对应角度计算方法与以上方法相同。计算出各轨道角度后,计算机拟合可得到穿刺器的整体角度。也就是在实际的机器人应用程序中,处理器15可以设定一个判读表格,该表格的数据通过前期各角度的坠落测试可以统计出来,例如间隔多长时间代表一个具体的倾斜角度数值。
在一个可能变形的实施方式中,所述第一摩擦纳米发电机141的数量也可以仅为一个,因为在释放器132释放球体143时,多个所述第一摩擦纳米发电机141也是同时工作,因此所述第一摩擦纳米发电机141的数量也可以仅为一个,该一个第一摩擦纳米发电机141可以设置成环形,多个球体143触发该第一摩擦纳米发电机141发电,此种情况下,所述第二摩擦纳米发电机142可以保留多个。
在另一个可能变形的实施方式中,所述第一及第二摩擦纳米发电机141,142的数量也可以均设为一个,此种情况下,可以把所述球体坠落平面147设为一个环形可以供球体滚动的通道形式,球体143花费多少时间滚落到第二摩擦纳米发电机142可以从表格中对应到倾斜姿态或具体的角度信息。
上述第一和第二摩擦纳米发电机141、142的电信号传导到电信号接收装置16后,电信号接收装置16分别记录为起始时间和终止时间。电信号接收装置16再将接收信号的时间传递给处理器15,处理器15通过计算起始时间与终止时间的差值后,可以标定出穿刺器13的位置信息。由处理器15将位置信息反馈给机械臂11控制器后,机械臂11可带动手术器械12同步移动到与穿刺器13同轴的平面上,医生只需要前推手术器械12的末端执行器经所述穿刺器13插入人体。
请再次参阅图5和图6,所述球体坠落平面147可以通过弹簧150连接到所述穿刺器13的外壁,所述球体143滚落时下压所述球体坠落平面147,所述弹簧150可以帮助所述球体坠落平面147复位。手术完成后,穿刺器13撤出人体,与电信号接收装置16连接断开,晃动穿刺器13将球体143复位,回旋释放器132,弹簧150推动球体坠落平面147复位,即可供下一次手术重复使用。
每个所述第一摩擦纳米发电机141和第二摩擦纳米发电机142的第一摩擦副145由一聚合物薄膜151和一导电金属层152堆叠形成,每个所述第一摩擦纳米发电机141和第二摩擦纳米发电机142的第二摩擦副146由一聚合物薄膜153和一导电金属层154堆叠形成。所述第一摩擦副145和第二摩擦副146摩擦时所述第一摩擦副145的聚合物薄膜151与对应的第二摩擦副146的聚合物薄膜151之间形成滑动摩擦。在空间比较小的情况下,每个所述第一摩擦副145的聚合物薄膜151与对应的第二摩擦副146的聚合物薄膜151可以相邻设置,或者在释放器132转动前,每个所述第一摩擦副145的聚合物薄膜151与对应的第二摩擦副146的聚合物薄膜151可以接近但没有接触,或者只接触一点点,在摩擦时两个聚合物薄膜151完全接触形成滑动摩擦。
所述聚合物薄膜的材料包括得失电子能力差异较大的聚合物材料,以使摩擦后可以获得更大的电压,有助于电信号的获取。所述导电金属层的材料选自金属材料。所述聚合物材料优选地选自聚酰亚胺(KAPTON)、聚四氟乙烯(PTFE)、聚对苯二甲酸乙二酯(PET)和聚二甲基硅氧烷(PDMS)的一种或几种组合。所述导电金属的金属优选地选自铜或铝的一种或其合金,这些材料电荷转移速度较快,成本可控,也有助于电信号的获取。在其它实施例中,所述聚合物薄膜151也可以使用一些常用的绝缘材料:例如苯胺甲醛树酯、聚甲醛、乙基纤维素、聚酰胺尼龙11、聚酰胺尼龙66、羊毛及其织物、蚕丝及其织物、纸、聚乙二醇丁二酸酯。所述两个聚合物薄膜151,153可以采用上述相同的材料,也可以采用上述不同的材料。所述两个导电金属层152,154也可以采用上述相同的材料,也可以采用上述不同的材料。
这种摩擦纳米发电机的聚合物薄膜的表面可以进行表面改性,例如加工纳米级别的金字塔结构,凹槽等等,用来增大发电量,可以理解的是,在本实施例的穿刺器13应用的摩擦纳米发电机只需保证电信号接收装置16,或者集成有电信号接收装置16的处理器15的灵敏度可以保证信号接收就行。
请再次参阅图3,所述穿刺器主体131对应第二摩擦纳米发电机142的位置可以设置一个导线罩134,用于收容电信号接收装置和/或处理器的电线。该导线罩134也可以起到标识第二摩擦纳米发电机142位置的作用,从而与释放器132有一个标识对应。第二摩擦纳米发电机142可以设置在穿刺器主体131的外壁和该导线罩134之间,或者穿刺器主体131的外壁开设一带封盖的圆形腔道,第二摩擦纳米发电机142装设入该圆形腔道后封盖盖上,再在这个封盖外围设该导线罩134。所述第一摩擦纳米发电机141、第二摩擦纳米发电机142与电信号接收装置和/或处理器的信号传输也可以是无线传输,从而不必有各条导线。
应用本申请两种实施方式的穿刺器13的手术机器人执行手术的方法,包括:
使用一连接有位置传感器14的穿刺器13穿刺身体手术位置,所述位置传感器14用于感应并输出所述穿刺器13的位置信息;
使用一处理器15接收所述位置传感器14输出的所述穿刺器13的位置信息,并输出相应的电信号;以及
使用机器人机械臂11驱动手术器械12的末端执行器执行手术的方式,所述机械臂11接收所述处理器15输出的电信号并根据该电信号移动至与所述穿刺器13耦接的位置,以使所述手术器械12的末端执行器在与所述穿刺器13呈同一水平线的位置而穿过所述穿刺器13进入身体进行手术。
本申请实施方式的穿刺器13带有位置传感器14,因此穿刺器13穿刺人体皮肤后自然下垂的位置可以被获得,因此手术机器人便可驱动机械臂11移动至与所述穿刺器13耦接的位置,如此使手术机器人机械臂11和穿刺器13在手术器械12插入人体腔道前容易处于同一水平线,然后医生再将手术器械12穿过穿刺器13,机械臂13便可驱动手术器械12执行手术,本申请的穿刺器13就是将医生插入手术器械12的调整周期缩短,减少了医生和患者在前期准备的耗时,提升了手术体验。
本申请涉及的手术机器人可以是单孔手术的单孔手术机器人,也可以是在身体开多个手术位置的多孔手术机器人,对本申请使用的穿刺器而言,单孔手术机器人和多孔手术机器人只是在与穿刺器耦接的方式有些不同,例如单孔手术机器人在机械臂根据本申请的穿刺器的位置反馈信号移动至与穿刺器预备耦接的位置后,通过机械臂的手术器械操纵器上的一个卡接结构卡入预先插入身体手术位置的穿刺器。再例如多孔手术机器人在机械臂根据本申请的穿刺器的位置反馈信号移动至与穿刺器预备耦接的位置后,通过机械臂的手术器械操纵器上的一个夹钳夹住预先插入身体手术位置的穿刺器,多孔手术机器人具有多个这样的机械臂和其上的手术器械操纵器,因此穿刺器就需要多个。最终,手术器械均穿过穿刺器而执行手术。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 适用激光手术操作器的手术机器人执行器及手术机器人系统
- 微创穿刺执行模组及多自由度微创穿刺手术机器人