牡蛎壳自动分离系统
文献发布时间:2024-01-17 01:15:20
技术领域
本发明涉及一种牡蛎壳自动分离系统,尤其涉及一种可以自动完成通过将没有脱肉的生牡蛎投入到定量供应器而使得一定量的生蚝被收纳到多个生蚝收纳笼中并将所述装有生蚝的生蚝收纳笼经过预热器投入到生蚝分离装置,从而借助于水压使得牡蛎肉的闭壳肌从牡蛎壳脱离,进而将装有脱肉牡蛎(牡蛎肉从牡蛎壳脱离的生牡蛎)的牡蛎收纳笼经过冷却器移动到振动筛选机中并在振动筛选机中筛选出牡蛎壳以及牡蛎肉并排出的全过程的牡蛎壳自动分离系统。
背景技术
本发明的申请人已经完成了专利注册第10-1939330号(发明的名称:牡蛎壳去壳装置:第一发明)以及专利注册第10-1945898号(发明的名称:牡蛎肉分离装置:第二发明)的专利注册,并通过专利公报公开了如上所述的现有发明。
所述第一发明采用在利用吊钩式升降气缸将装有牡蛎的牡蛎筐投入到腔室的筐投入空间之后对腔室的入口进行密封并通过施加水压而使得牡蛎肉从牡蛎壳分离,进而利用包括气缸的液压装置将牡蛎筐取出到外部的构成。
此外,第二发明是一种可以在将利用所述第一发明的牡蛎壳去壳装置撑开牡蛎壳且牡蛎肉的闭壳肌从牡蛎壳脱离的牡蛎(脱肉牡蛎)投入到水箱内侧的状态下从底部利用压缩空气生成气泡并借此使得牡蛎壳与其内侧的牡蛎肉借助于气泡压力分离,进而在水箱内侧的水(海水)溢出的过程中使得牡蛎肉与所溢出的水一起排出到外部,同时将分离牡蛎肉之后的牡蛎壳利用牡蛎壳排出装置排出到外部的装置。
在向所述第一发明投入牡蛎时,将牡蛎装入牡蛎筐的作业以及将装有牡蛎的牡蛎筐移送到第一发明的牡蛎壳去壳装置的作业依赖于手动作业,而且将在第一发明的牡蛎壳去壳装置中分离出的牡蛎移送投入到第二发明的作业同样依赖于手动作业,因此具有作业繁杂且无法提升生产性的问题。
发明内容
本发明旨在解决如上所述的现有问题,其技术课题在于自动完成通过将没有脱肉的生牡蛎投入到定量供应器而使得一定量的生蚝被收纳到多个生蚝收纳笼中并将所述装有生蚝的生蚝收纳笼经过预热器投入到生蚝分离装置,从而借助于水压使得牡蛎肉的闭壳肌从牡蛎壳脱离,进而将装有牡蛎肉从牡蛎壳脱离的脱肉牡蛎的牡蛎收纳笼经过冷却器移动到振动筛选机中并在振动筛选机中筛选出牡蛎壳以及牡蛎肉并排出的全过程。
为了达成如上所述的目的,本发明的特征在于:在利用水压从牡蛎壳分离牡蛎肉的牡蛎壳自动分离系统的构成中,所述牡蛎壳自动分离系统,包括:定量供应器,用于将装在一级料斗上的牡蛎定量投入到在外周缘的整个周围形成有多个通孔的桶状牡蛎收纳笼;笼装载台,用于在安置多个空牡蛎收纳笼的状态下将从定量供应器供应过来的牡蛎装入到其中的一个牡蛎收纳笼中待命;预热器,用于将装有牡蛎的牡蛎收纳笼浸泡到温水中而使牡蛎松弛;牡蛎分离装置,用于在将从预热器供应过来的多个牡蛎收纳笼投入到腔室之后封闭腔室的入口以及出口并向腔室内侧供应水压而使得牡蛎肉从牡蛎壳的内侧面脱离;冷却器,用于将从腔室移出的牡蛎收纳笼浸泡到冷水中而使松弛的牡蛎活化;翻转器,用于将从冷却器供应过来的牡蛎收纳笼翻转180°而将装在牡蛎收纳笼中的脱肉牡蛎向下倾倒;振动筛选机,用于将从翻转器倾倒出来的脱肉牡蛎筛选成牡蛎壳以及牡蛎肉之后分离排出;以及,笼移动装置,用于利用沿着机器人移动导轨移动的笼移动机器人将在笼装载台上待命的牡蛎收纳笼投入到预热器,并将装在冷却器中的牡蛎收纳笼移动供应到翻转器,进而将在翻转器中清空的牡蛎收纳笼装载到笼装载台上。
如上所述的本发明的牡蛎壳自动分离系统,可以自动完成通过将没有脱肉的生牡蛎投入到定量供应器而使得一定量的生蚝被收纳到多个生蚝收纳笼中并将所述装有生蚝的生蚝收纳笼经过预热器投入到生蚝分离装置,从而借助于水压使得牡蛎肉的闭壳肌从牡蛎壳脱离,进而将装有牡蛎肉从牡蛎壳脱离的脱肉牡蛎的牡蛎收纳笼经过冷却器移动到振动筛选机中并在振动筛选机中筛选出牡蛎壳以及牡蛎肉并排出的全过程,从而提升生产性。
附图说明
图1是对本发明的作业工程进行图示的工程图。
图2是对本发明中所包含的牡蛎收纳笼进行图示的斜视图。
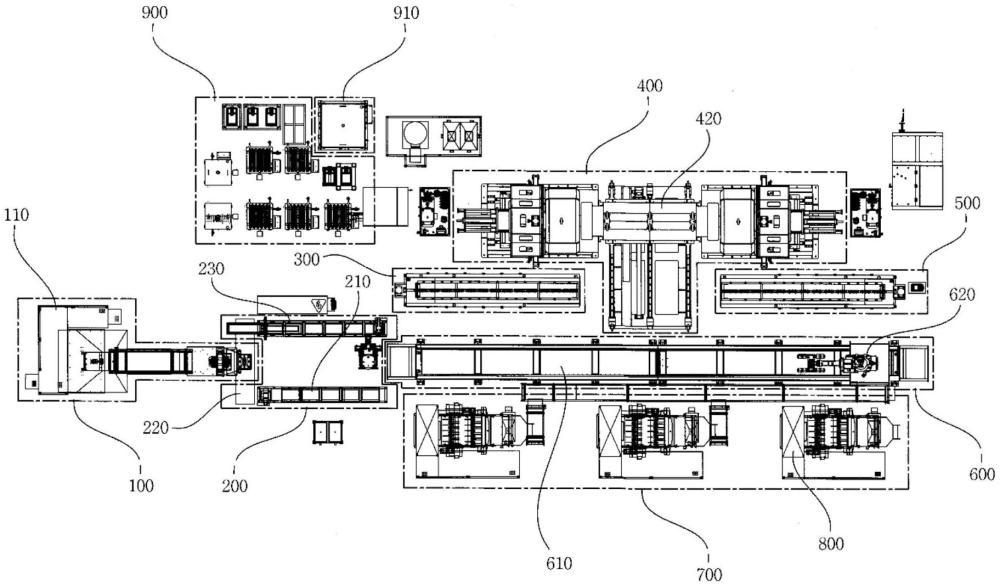
图3是对本发明的牡蛎壳自动分离系统进行图示的平面配置图。
图4是对本发明中所包含的定量供应器进行图示的侧向截面图。
图5是对本发明中所包含的笼装载台进行图示的平面图。
图6是对本发明中所包含的排出传送带进行图示的侧面图。
图7是对本发明中所包含的预热器和牡蛎分离装置以及冷却器的配置状态进行图示的平面图。
图8是对本发明中所包含的预热器进行图示的侧向截面图。
图9是对本发明中所包含的冷却器进行图示的侧向截面图。
图10是对本发明中所包含的振动筛选机进行图示的侧向截面图。
图11是对本发明中所包含的翻转器进行图示的侧向截面图。
具体实施方式
接下来,将参阅图1至图11对适用本发明的牡蛎壳自动分离系统进行详细的说明如下。
适用本发明的牡蛎壳自动分离系统,涉及一种利用水压将牡蛎肉从牡蛎壳分离的牡蛎壳自动分离系统。
所述牡蛎壳自动分离系统,包括:定量供应器100,用于将装在一级料斗110上的未脱肉牡蛎(牡蛎肉附着在牡蛎壳的内侧面上的活牡蛎)定量投入到在外周缘的整个周围形成有多个通孔的桶状牡蛎收纳笼10;笼装载台200,用于在安置多个空牡蛎收纳笼10的状态下将从定量供应器100供应过来的牡蛎装入到其中的一个牡蛎收纳笼10中待命;预热器300,用于将在笼装载台200上待命的牡蛎收纳笼10移动到温水中浸泡而使牡蛎松弛;牡蛎分离装置400,用于在将从预热器300供应过来的多个牡蛎收纳笼10投入到腔室420之后封闭腔室420的入口以及出口并向腔室420内侧供应水压而使得牡蛎肉从牡蛎壳的内侧面脱离;冷却器500,用于将从腔室420移出的牡蛎收纳笼10浸泡到冷水中而使松弛的牡蛎活化;翻转器800,用于接收从笼移动装置600供应过来的装载在冷却器500上的牡蛎收纳笼10并翻转180°而将装在牡蛎收纳笼10中的脱肉牡蛎向下倾倒;振动筛选机700,用于将从翻转器800倾倒出来的脱肉牡蛎筛选成牡蛎壳以及牡蛎肉之后分别分离排出;以及,笼移动装置600,用于利用沿着机器人移动导轨610移动的笼移动机器人620将在笼装载台200上待命的牡蛎收纳笼10投入到预热器300,并将装在冷却器500中的牡蛎收纳笼10移动供应到翻转器800,进而将在翻转器800中清空的牡蛎收纳笼10装载到笼装载台200上。
所述定量供应器100如图3以及图4所示,包括:一级料斗110,用于盛放没有脱肉的生牡蛎;倾斜传送带120,用于将从一级料斗110的下侧排出口跌落的牡蛎向上侧倾斜移动;以及,定量供应部130,用于将从倾斜传送带120供应过来的牡蛎定量投入到牡蛎收纳笼10。
在所述定量供应部130的箱体式框架131的上侧,配备有用于盛放从倾斜传送带120的上侧跌落的牡蛎的二级料斗132,而在二级料斗132的下部,以可借助于料桶气缸134进行升降的方式安装有底面向前方下向倾斜并以与牡蛎收纳笼10相同的容积形成的料桶133。
此外,在框架131的前方,下向倾斜安装有用于排出装在料桶133上的牡蛎的排出管135,在排出管135的入口处,以可借助于开闭气缸136进行升降的方式安装有用于对排出管135的入口处进行开闭的排出管开闭口137,而在排出管135的入口部的指定位置,安装有通过对装在料桶133上的牡蛎的量进行检测而停止倾斜传送带120的传感器138。
在所述倾斜传送带120的皮带部122的外部面,相距一定的间隔安装有多个隔断121,从而防止放置在以倾斜状态移动的皮带部122上的牡蛎向下侧发生滑动,而在料桶133的后方一侧的框架131的指定位置上,以可借助于气缸进行往返移动的方式安装有通过向上侧推动装在料桶133上的牡蛎而使得山形隆起的牡蛎堆的上侧变得平坦的刮板139。
此时,所述料桶133以较宽的桶形形态形成,当外部形状不规则的多个牡蛎被装在料桶133上时,装在料桶133上的牡蛎将堆积形成中央上部隆起的山形形态,而且会在与其周边即料桶133的内壁面相邻的部分形成直角倒三角形态的空白空间,因此通过将所述山形隆起的上部推入到直角倒三角形态的空白空间使其变得平坦,可以在从料桶133排出到排出管135时防止牡蛎的上侧部分被排出管开闭口137阻挡。
如图3、图5以及图6所示,所述笼装载台200,包括:引入传送带210,用于逐个接收从笼移动机器人620供应过来的已经在翻转器800中清空的多个牡蛎收纳笼10并对其进行安置,进而将所安置的牡蛎收纳笼10逐个移动到安装在穿梭器移送传送带220的上侧的穿梭器221一侧;穿梭器移送传送带220,在皮带部122的上侧安装有用于将安置在上侧的牡蛎收纳笼10旋转90°的穿梭器221,并将安置在穿梭器221上的牡蛎收纳笼10从引入传送带210的末端部一侧移动到排出传送带230的前端部一侧;以及,排出传送带230,用于通过借助于拉动气缸232工作的拉动器件231将安置在穿梭器221上的装有牡蛎的牡蛎收纳笼10拉动并装载到排出传送带230的皮带部233上。
在所述引入传送带210、穿梭器移送传送带220以及排出传送带230中,皮带部被电机驱动,且穿梭器移送传送带220的皮带部222以可往返移动的方式构成,在引入传送带210以及排出传送带230的两侧安装有用于对圆桶形牡蛎收纳笼10进行导向的侧面导向器211、234,在皮带部的中央分别安装有用于对在牡蛎收纳笼10的下部以隧道槽的形态形成的导向部16进行导向的下部导向器212、235。
此外,在所述穿梭器221中,在安装于皮带部222上的安装台223中安装有电机,而且在其上侧安装有可供牡蛎收纳笼10安置的安置台,从而当所述穿梭器221在定量供应器100的排出管135下侧暂时停止时,使得从排出管135跌落的牡蛎被装入到牡蛎收纳笼10的内侧。
所述预热器300如图3以及图8所示,在装有温水的水槽310的内侧安装有用于将装有牡蛎的多个牡蛎收纳笼10沿着长度方向进行安置的笼装载架320,笼装载架320以可借助于沉浮组件在水槽内的水中沉浮的方式安装,在所述水槽310的内侧安装有用于对装在水槽310中的水进行加热的加热器340。
此时,所述加热器340将装在水槽310中的水的温度加热至25~40℃,当装在水槽310中的水的温度达到25~40℃时,生牡蛎将变得松弛,从而在后续的牡蛎分离装置400中使得牡蛎肉从牡蛎壳分离时,可以减小闭壳肌附着到牡蛎壳上的附着力并借此使得牡蛎肉从牡蛎壳分离。
所述冷却器500如图3以及图9所示,在装有冷水的水槽510的内侧安装有用于将装有牡蛎的多个牡蛎收纳笼10沿着长度方向进行安置的笼装载架520,笼装载架520以可借助于沉浮组件在水槽内的水中沉浮的方式安装。
此时,利用单独的冷却器将装在所述水槽510中的水的温度冷却至4~6℃,当装在水槽510中的水的温度达到4~6℃时,处于松弛状态的牡蛎将重新被活化,从而向消费者供应新鲜的牡蛎。
如图8以及图9所示,安装在预热器300以及安装在冷却器500中的所述笼装载架320、520以及沉浮组件以相同的结构构成,笼装载架320、520在利用可供装在各个水槽310、510中的水通过的结构体形成的下部框架321、521的两侧和底部分别沿着长度方向安装有用于对圆桶形牡蛎收纳笼10的两侧以及下部进行支撑的侧面支撑台322、522以及下部导向滚柱323、523。
此外,在所述沉浮组件中,笼装载架320、520的一侧端下部以铰链式安装在水槽310、510的一侧上部,而在笼装载架320、520的另一端部安装有升降组件,从而使得笼装载架320、520借助于升降组件330、530在水槽内的水中以铰链式沉浮。
此外,在所述升降组件330、530中,在水槽310、510的另一端外侧安装有高度高于水槽310、510的气缸安装架331、531,在所述气缸安装架331、531的上下部分别安装有上部滚柱332、532以及下部滚柱333、533,在各个气缸安装架331、531的上部分别安装有气缸334、534,在各个气缸杆的端部与笼装载架320、520的另一侧端部之间安装有钢丝335、535,所述钢丝335、535以缠绕下部滚柱333、533以及上部滚柱332、532的方式安装,从而可以借助于气缸气缸334、534的动作使得笼装载架320、520在装在水槽310、510内的水中沉浮。
如图7所示,所述预热器300以及冷却器500沿着一直线以相距可供牡蛎分离装置400的腔室420进出的间隔的状态安装。
所述牡蛎分离装置400,可以包括:中央导向导轨410,在预热器300与冷却器500之间的底面沿着与预热器300以及冷却器500垂直相交的方向安装;腔室420,以内侧空间与预热器300以及冷却器500在相同直线上贯通的圆桶管形态形成,以可向前后方往返移动的方式安装在中央导向导轨410上;侧方导向导轨430,安装在预热器300以及冷却器500前方的中央导向导轨410的两侧底面;以及,封闭器440,以可滑动式往返移动的方式分别安装在两侧的侧方导向导轨430上,在沿着侧方导向导轨430移动的同时分别对腔室420的两侧开口部进行封闭,在中央部安装有用于向腔室420的内部供应水压的水压供应部441。
所述牡蛎收纳笼10如图2所示,为圆桶被横放的形态并以其上部圆周面开放形成,在所述牡蛎收纳笼10的上下部分别形成通过被导向组件导向而使其以上侧出入部朝向上侧的状态移动的导向部15、16,在安装在牡蛎收纳笼10的前后侧面上的圆盘形前后侧面板12、13上形成有可供用于在翻转器800中将牡蛎收纳笼10翻转180°的旋转体820插入并对其进行夹持的夹持槽14。
此外,所述翻转器800如图10以及图11所示,在框架810的上部安装有用于对牡蛎收纳笼10的前后侧面进行夹持并将其翻转180°的旋转体820,在所述旋转体820中,一对往返移送台821以彼此相向的状态以及可借助于气缸822往返移动的方式安装在框架810的上部两侧,在两侧往返移送台821的内侧分别安装有用于对牡蛎收纳笼10的前后侧面进行夹持并旋转的嵌入部823,一侧的旋转体820以可借助于电机824每次旋转180°的方式安装。
此外,所述振动筛选机700如图10所示,安装在旋转体820的下侧,在安装有振动器711并振动的振动框架710的下部,安装有在中间沿着垂直方向安装有弹簧712的多个支撑腿713,而在振动框架710的上部,以指定角度倾斜安装有通过多个供水部725进行供水的筛选托盘720。
此时,在所述筛选托盘720的内侧,从倾斜的底面向上侧上升一定高度的位置上以倾斜且可拆装的方式安装有形成多个牡蛎肉通孔722的穿孔板721,在筛选托盘720的较低一侧的底面下向安装有牡蛎肉排出口723,而在筛选托盘720的较低一侧的与穿孔板721相同的高度线上外向安装有牡蛎壳排出口724。
之所以将所述穿孔板721以倾斜且可拆装的方式进行安装,是为了更换使用不同大小的牡蛎肉通孔722,从而在牡蛎的大小较大的情况下安装牡蛎肉通孔722的内径较大的穿孔板721,而在牡蛎的大小较小的情况下安装牡蛎肉通孔722的内径较小的穿孔板721,并借此筛选出均匀大小的牡蛎肉。
此外,在所述筛选托盘720的上部以可借助于电机自由旋转的方式安装有用于将堆积在穿孔板721上的牡蛎堆平坦铺开的旋转翼726。
在附图编号中,未说明的编号“900”代表用于保管本发明工作时所需要的水的水箱,而“910”代表用于对本发明进行控制的控制装置部。
接下来,将参阅图1至图11对如上所述构成的本发明的作用关系进行详细的说明如下。
在拟利用本发明对生牡蛎进行脱肉的情况下,如图1、图3以及图4所示,将大量没有脱肉的生牡蛎投入到定量供应器100的一级料斗110中。此时,倾斜传送带120的下侧部分将位于在一级料斗110的下侧开放形成的排出口的下侧。
当在如上所述的状态下驱动倾斜传送带120时,向一级料斗110的排出口下侧排出的牡蛎将被堆积在倾斜传送带120上,此时因为在倾斜传送带120的皮带部122上相距一定的间隔安装有多个隔断121,因此牡蛎将被装入到隔断121之间的空间上,而被装入到隔断121之间的空间上的牡蛎将借助于倾斜传送带120的驱动向倾斜传送带120的上侧移动。
当如上所述的被装入到倾斜传送带120上并向上侧移动的牡蛎上升到倾斜传送带120的最高点之后向下侧移动时,被装入到隔断121之间的空间上的牡蛎将向下侧跌落,此时定量供应部130中的二级料斗132将位于其下侧,从而使得从上侧跌落的牡蛎被装入到二级料斗132上。
因为所述二级料斗132的底部是向前方一侧下向倾斜形成,因此牡蛎将借助于自重向下侧移动,此时上部开放的料桶133将位于所述二级料斗132的下部,从而使得沿着二级料斗132的倾斜面下落的牡蛎被装入到料桶133中。
此时,因为在与料桶133的上部相邻的排出管135的入口部的指定位置安装有用于对装入到料桶133中的牡蛎的量进行检测的传感器138,因此在牡蛎被装入至料桶133的上部时,可以利用传感器138对所述牡蛎的装入量进行检测并停止倾斜传送带120的运行。
如上所述的装入到料桶133中的牡蛎的量与图2中所图示的牡蛎收纳笼10的溶剂类似,但是因为牡蛎的外部形状不规则且其大小参差不齐,因此在将牡蛎装入到料桶133中时会在所装入的牡蛎之间形成不规则的空间并在料桶133中以山形堆积,从而在料桶133的内侧中央部向上侧隆起凸出,而在其周边即与料桶133的内壁面相邻的部分形成直角倒三角形态的空白空间。
如果如上所述的装入到料桶133中的牡蛎堆的中央部分向料桶133的上侧隆起而以山形堆积,在后续过程中将装入到料桶133中的牡蛎排出到排出管135的入口部时,隆起堆积的牡蛎将被排出管135的入口部上侧阻挡,因此通过借助于气缸将安装在料桶133的后方上侧的刮板139水平移动,向上侧隆起堆积的牡蛎将被刮板139推动而向与料桶133的内壁面相邻的倒三角形态的空白空间移动,从而使得牡蛎的上侧平坦化。
接下来,通过上升对排出管135的入口部进行封闭的开闭气缸136而使得排出管开闭口137开放排出管135的入口部,进而在上升料桶气缸134时料桶133将上升且料桶133的倾斜底面与排出管135的下部内侧倾斜面将对齐,从而使得装载料桶133上的牡蛎通过排出管135向下侧移动。
此时,牡蛎收纳笼10位于排出管135的下部,因此从排出管135下落的牡蛎将通过牡蛎收纳笼10的开放的上侧出入部装入到牡蛎收纳笼10的内部,而所述牡蛎收纳笼10如图3至图5所示,将被放置在安装于笼装载台200的穿梭器移送传送带220上的穿梭器221中,从而借助于穿梭器移送传送带220的移动使得放置在穿梭器221中的牡蛎收纳笼10移动到排出管135的下部。
关于如上所述的用于盛放牡蛎的牡蛎收纳笼10,在初期会有多个空的牡蛎收纳笼10被装载在笼装载台200的引入传送带210上,在初次启动本发明时需要手动地将多个空的牡蛎收纳笼10沿着长度方向安置在引入传送带210上,而在通过本发明执行牡蛎的脱肉作业的过程中,在翻转器800中清空的牡蛎收纳笼10将借助于笼移动装置600中的笼移动机器人620移动并装载到引入传送带210上。
如上所述的装载到引入传送带210上的牡蛎收纳笼10将以圆桶被横放的形态沿着长度方向装载多个,而在所述引入传送带210以及后续说明的排出传送带230中安装有用于在各自的皮带部的两侧对圆桶形牡蛎收纳笼10的两侧进行支撑和导向的侧面导向器211、234以及对在牡蛎收纳笼10的下部以隧道槽形态形成的导向部16进行支撑和导向的下部导向器212、235,从而如图2所示,可以使得以圆桶形形成的牡蛎收纳笼10不会向一侧倾倒并以上侧出入口朝向上侧的状态移动。
在如上所述的状态下,装载在引入传送带210上的多个空的牡蛎收纳笼10将随着被电机驱动的皮带部向与引入传送带210的末端部相邻的穿梭器移送传送带220的前端部一侧移动,此时穿梭器221会通过驱动皮带部222的电机而移动到引入传送带210的末端部一侧,从而使得随着引入传送带210移动的牡蛎收纳笼10被放置在穿梭器221的上部。
此时,各个传送带210、230以及穿梭器移送传送带220整体上以“匚”字形态配置,牡蛎收纳笼10在各个传送带210、230上将沿着与传送带的长度方向相同的方向移动,而在穿梭器移送传送带上220将沿着与装载到所述引入传送带210以及派出传送带230时垂直相交的方向装载。
这是为了在牡蛎收纳笼10被设计成在前后长度方向上的长圆桶形的状态下尽可能地缩短本发明的牡蛎壳自动分离系统1的成体长度变长并缩短定量供应部130以及穿梭器移送传送带220的宽度,从而将其设计成牡蛎收纳笼10在穿梭器移送传送带220上以旋转90°的状态通过上侧出入口接收从排出管135排出的牡蛎,但是也可以采用在传送器移送传送带220上不将牡蛎收纳笼10旋转90°而是沿着与装载到引入传送带210以及排出传送带230中的方向相同的方向装载到穿梭器221上的构成。
在如上所述的将从引入传送带210供应过来的空的牡蛎收纳笼10放置在穿梭器移送传送带220上侧的穿梭器221上之后,通过移动皮带部222而使得穿梭器221停在排出管135的正下方,并在所述位置上利用安装在穿梭器221的安装台223内侧的电机将牡蛎收纳笼10旋转90°的状态下将从排出管135排出的牡蛎装入牡蛎收纳笼10的内侧,然后将穿梭器221再次旋转90°并重新移动穿梭器移送传送带220,从而使得装有牡蛎的牡蛎收纳笼10移动到排出传送带230的前端部一侧并停止。
接下来,当在如图6所示的安装在排出传送带230的前端部一侧上部的拉动器件232位于放置在穿梭器221上的牡蛎收纳笼10的背面的状态下驱动拉动气缸231时,拉动器件232将拉动牡蛎收纳笼10而使其移动到排出传送带230的皮带部233上。
如图3以及图5所示,如上所述的被移动到排出传送带230的皮带部233上的牡蛎收纳笼10将借助于皮带部233的移动向预热器300一侧移动,从而使得装有牡蛎的多个牡蛎收纳笼10被装载在排出传送带230上待命。
在如上所述的状态下,将利用笼移动装置600的笼移动机器人620夹持装载在排出传送带230上的装有牡蛎的牡蛎收纳笼10并移动装载到预热器300中。
所述预热器300如图8所示,可以通过在水槽310的内侧安装有用于沿着长度方向安置多个牡蛎收纳笼10的笼装载架320而沿着长度方向安置多个牡蛎收纳笼10,接下来可以通过驱动安装在铰链部311的相反一侧的升降组件330的气缸334而使得笼装载架320浸入到装在水槽310上的热水中,从而使得装载在笼装载架320上的多个牡蛎收纳笼10也被浸入到热水中。
所述热水利用加热器维持25~40℃的温度,当维持如上所述的状态5~10分钟时,可以借助于热水使得生牡蛎的牡蛎肉变得松弛、牡蛎壳展开且闭壳肌附着在牡蛎壳上的附着力变弱,从而在后续的牡蛎分离装置400中使得牡蛎肉更轻易地从牡蛎壳分离。
如上所述,在经过5~10分钟之后反方向驱动气缸334时,借助于被缠绕在气缸杆与笼装载架320之间的各个滚柱332、333上的钢丝335,笼装载架320将浮起到热水的水面上方。
接下来,如图3以及图7所示,将以可滑动的方式安装在牡蛎分离装置400的中央导向导轨410上的腔室420移动到预热器300与冷却器500之间的空白空间中,从而使得预热器300、腔室420以及冷却器500位于同一直线上。
在如上所述的状态下,利用笼移动装置600的笼移动机器人620将沿着长度方向装载在预热器300上的多个牡蛎收纳笼10推入到腔室420一侧,所述腔室420以入口以及出口开放的圆桶管形态形成,从而可以将装载在预热器300上的多个牡蛎收纳笼10推入到腔室420的内侧,在腔室420的内侧上下部沿着长度方向安装有用于对在牡蛎收纳笼10的上下部形成的导向部15、16进行导向的滚柱型导向导轨,从而可以使得圆桶形且上部开放的牡蛎收纳笼10不会向一侧倾倒并以上侧出入部朝向上侧的状态将多个牡蛎收纳笼10插入到腔室420的内侧。
在如上所述的将多个牡蛎收纳笼10插入到腔室420的内侧之后,将所述腔室420水平移动到两侧的封闭器440之间,腔室420可以被中央导向导轨410导向并顺利地移动,而在将腔室420移动到两侧的封闭器420之间时,两侧的封闭器440应借助于两侧的侧方导向导轨430处于向两侧撑开的状态。
当在腔室420移动到如上所述的向两侧撑开的封闭器420之间并停止移动之后将向两侧撑开的各个封闭器440沿着侧方导向导轨430向内侧移动时,两侧的封闭器440将对腔室440的两侧入口以及出口进行封闭,而在如上所述的对腔室420进行封闭之后,将通过安装在封闭器440的中央部的水压供应部441向腔室420的内侧供应水压。
当向如上所述的入口以及出口被封闭的腔室420的内侧供应水压时,水压将作用于被插入到腔室420的内部的多个牡蛎收纳笼10中,而如图2所示,因为在所述牡蛎收纳笼10的所有面上都形成有通孔11,因此水压还可以通过所述通孔11作用于牡蛎收纳笼10的内部。
在如上所述的腔室420内侧的水压上升的过程中,水压将作用于在预热器300中展开的牡蛎壳的缝隙中并使得牡蛎壳进一步展开,从而使得压力作用于附着在牡蛎壳的内部面上的闭壳肌的整个外周并借此挤压闭壳肌,而牡蛎肉在预热器300中得到松弛且附着到牡蛎壳的内侧面的附着力将减弱,从而使得变软的闭壳肌轻易地从坚硬的牡蛎壳脱落并最终使得牡蛎肉从牡蛎壳脱离。
如上所述,在水压持续作用所设定的时间(几分钟)而使得牡蛎肉从牡蛎壳分离,并通过排气阀排出水压之后开放两侧的封闭器440而使得两侧的封闭器440开放时,重新将所述腔室420移动到预热器300与冷却器500之间,从而使得预热器300、腔室420以及冷却器500位于同一直线上。
接下来,当将装载在预热器300上的多个牡蛎收纳笼10推入到腔室420的内侧时,在装有脱肉牡蛎(牡蛎肉从牡蛎壳脱离的牡蛎)的多个牡蛎收纳笼10被插入到腔室420的内侧的状态下,通过从预热器300推入装有未脱肉牡蛎(牡蛎肉附着在牡蛎壳的牡蛎)的牡蛎收纳笼10,装有脱肉牡蛎的牡蛎收纳笼10将被推出并通过腔室420的相反一侧出口装载到冷却器500上。
在如上所述的从腔室420推出的多个牡蛎收纳笼10被装载到冷却器500的笼装载架520之后,当利用包括气缸534以及气缸安装架531的升降组件530以铰链式下降笼装载架520时,装有脱肉牡蛎的多个牡蛎收纳笼10将被浸入到水槽510内侧的冷水(4~6℃)中,从而利用冷水使得在预热器300中通过热水变得松弛的脱肉牡蛎被活化并重新变成新鲜的状态。
在如上所述的通过将笼装载架520浸泡在冷水中1~2分钟而使得牡蛎活化之后通过驱动升降组件530而将笼装载架520浮起到水面上方时,放置在笼装载架520上的装有脱肉牡蛎的牡蛎收纳笼10也将浮起到水面上方。
接下来,如图3、图10以及图11所示,利用笼移动装置600的笼移动机器人620将放置在冷却器500的笼装载架520上的牡蛎收纳笼10逐个移动到翻转器800中并安置在两侧的旋转体820之间。
所述两侧的旋转体820将在彼此相向的状态下借助于下侧的气缸822向内侧收缩并向外侧展开,从而借助于两侧的气缸822的作用使得两侧的旋转体820之间变窄。
此时,两侧的旋转体820如图2所示,形成有被插入到在牡蛎收纳笼10的前后侧面板12、13上形成的夹持槽14的嵌入部823,从而使得两侧的旋转体820稳定地对牡蛎收纳笼10的前后侧面进行夹持。
在如上所述的利用两侧的旋转体820稳定地对牡蛎收纳笼10的前后侧面进行夹持之后,通过驱动安装在一侧的旋转体820上的电机824而使得朝向上侧的牡蛎收纳笼10的出入口旋转180°朝向下侧时,装在牡蛎收纳笼10的内侧的脱肉牡蛎将向翻转器800的下侧倾倒。
如上所述的翻转器800如图10所示,被安装在振动筛选机700的上侧,因此从翻转器800向下侧倾倒的脱肉牡蛎将被堆积在振动筛选机700的穿孔板721的上侧面。
如上所述,通过重新驱动电机824而使得在翻转器800中排出脱肉牡蛎的空的牡蛎收纳笼10的出入口朝向上侧之后,在利用笼移动机器人620对空的牡蛎收纳笼10进行夹持的状态下展开两侧的旋转体,接下来将所述孔的牡蛎收纳笼10以如图3所示的方式重新装载到笼装载台200的引入传送带210上,以准备接下来的作业。
如上所述,在将脱肉牡蛎倾倒到振动筛选机700的穿孔板721的上侧面时,因为牡蛎壳被展开,牡蛎肉将从牡蛎壳分离并排出或有一部分牡蛎肉留在牡蛎壳内部,并在穿孔板721的上侧面成堆堆积。
在如上所述的状态下,通过振动筛选机700上侧的供水部725喷水并旋转安装在筛选托盘720上部的旋转翼726,与此同时驱动安装在筛选托盘720的下侧的振动器711工作,此时支撑腿713的弹簧712上侧的结构体将整体发生振动并借此使得成堆堆积在穿孔板721上的牡蛎堆变得平坦并向倾斜的下侧移动。
在如上所述的过程中,因为在穿孔板721上形成有非常多的牡蛎肉通孔722,因此牡蛎肉将穿过牡蛎肉通孔722并跌落到筛选托盘720的底面,并借助于所述振动器711的振动使得牡蛎肉通过倾斜的下侧的牡蛎肉排出口723排出,而牡蛎壳则向穿孔板721的倾斜的下侧移动并通过牡蛎壳排出口724排出,因此通过本发明可以自动地对牡蛎进行脱肉并将牡蛎壳以及牡蛎肉分离排出。
具体实施方式
本发明涉及一种利用水压从牡蛎壳分离牡蛎肉的牡蛎壳自动分离系统,是一种具有产业可用性的发明。
- 高效核桃破壳取仁壳仁分离自动化生产系统
- 高效核桃破壳取仁壳仁分离自动化生产系统