大负负载机构液压伺服调节装置及其控制方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及风洞液压控制技术领域,具体讲是一种大负负载机构液压伺服调节装置及其控制方法。
背景技术
风洞液压控制技术领域常用到液压系统驱动负载机构,当油缸杆伸出提供推力时称为正值负载,当油缸杆伸出提供拉力时称为负值负载(简称负负载)。大负负载机构是指几十吨甚至几百吨负载的驱动机构在上下运动时,在重力作用下,油缸杆始终提供拉力,该工况下的大负载机构称为大负负载机构。
在现有的技术中,大负负载机构液压伺服系统通常采用伺服比例阀直接控制油缸两腔或者仅仅控制油缸下腔的方式实现油缸位移或速度控制。采用伺服比例阀直接控制油缸两腔方式,因伺服比例阀开口与油缸面积比不匹配,常存在油缸上腔吸空或油缸下腔超压问题;采用伺服比例阀直接控制油缸下腔,会造成系统响应降低,调节速度变慢。
发明内容
因此,为了解决上述不足,本发明在此提供一种大负负载机构液压伺服调节装置及其控制方法;本发明是通过在油缸上腔增加减压补油回路和超压溢流回路稳定油缸上腔压力,实现伺服比例阀控制油缸液压伺服系统的平稳运行、快速调节。
具体的,一种大负负载机构液压伺服调节装置,所述大负负载机构包括油缸,所述油缸连接有减压补油回路和超压溢流回路;
所述油缸还连接有伺服比例阀,该油缸的上腔和下腔分别通过上腔支路和下腔支路与伺服比例阀连接,该伺服比例阀与供油支路和回油支路连接;其中所述油缸的上腔安装有上腔压力传感器,所述油缸的下腔安装有下腔压力传感器;
所述减压补油回路一端与所述上腔支路连通,另一端与所述供油支路连通;
所述超压溢流回路一端与所述上腔支路连通,另一端与所述回油支路连通。
可选的,所述减压补油回路包括第一节流阀和减压阀,所述减压阀靠近油缸上腔,并与所述第一节流阀串联,同时所述减压阀还与所述超压溢流回路连接。
可选的,所述超压溢流回路包括第二节流阀和溢流阀,所述溢流阀靠近油缸的上腔并与所述溢流阀串联。
通过上述技术特征是在油缸上腔增加减压补油回路和超压溢流回路稳定油缸上腔压力,实现伺服比例阀控制油缸液压伺服系统的平稳运行、快速调节。
另一方面,本发明还提供了一种大负负载机构液压伺服调节装置的控制方法,包括:
S01、关闭减压补油回路和超压溢流回路;
S02、控制驱动油缸的伸缩杆向下运动,监测油缸的上腔压力传感器和下腔压力传感器数值,若油缸的上腔压力传感器数值小于第一阈值,进入步骤S03;若油缸的下腔压力传感器数值大于油缸额定工作压力,进入步骤S04,可选的,所述第一阈值为1.0MPa。
S03、打开减压补油回路,调高上腔压力至阈值范围,并调节下腔压力,使下腔压力比油缸额定工作压力低2.0MPa~5.0MPa,优选为2.0MPa。优选的,所述阈值范围为1.0MPa~5.0MPa。
S04、打开超压溢流回路,调低上腔压力至阈值范围,并调节下腔压力低于气缸额定工作压力,使下腔压力比油缸额定工作压力低2.0MPa~5.0MPa,优选为2.0MPa。
S05、驱动油缸的伸缩杆向上运动,若上腔压力值小于第一阈值,进入步骤S03;若油缸下腔压力值大于油缸额定工作压力,进入步骤S04;
S06、按照上述步骤S02至步骤S05,完成油缸上腔和下腔的压力调节。
S07、完成步骤S06后,伺服比例阀和油缸组成的液压回路投入闭环控制,完成液压伺服控制参数调节。
通过上述方法能够解决大负负载机构液压伺服控制系统中油缸上腔吸空和油缸下腔超压两类问题。
本发明具有如下优点:
本发明通过在大负负载机构液压伺服控制系统中设置减压阀和溢流阀控制油缸上腔压力,解决大负负载机构液压系统中因伺服比例阀开口与油缸面积比不匹配时造成油缸上腔吸空或者油缸下腔超过工作压力等问题,实现油缸驱动大负负载机构稳定运行。
同时本发明可操作性好:控制目的、控制对象、控制方法或判断依据明确,易于执行。
并且本发明适用范围广:能够同时解决大负负载机构液压伺服控制系统中油缸上腔吸空和油缸下腔超压两类问题。
附图说明
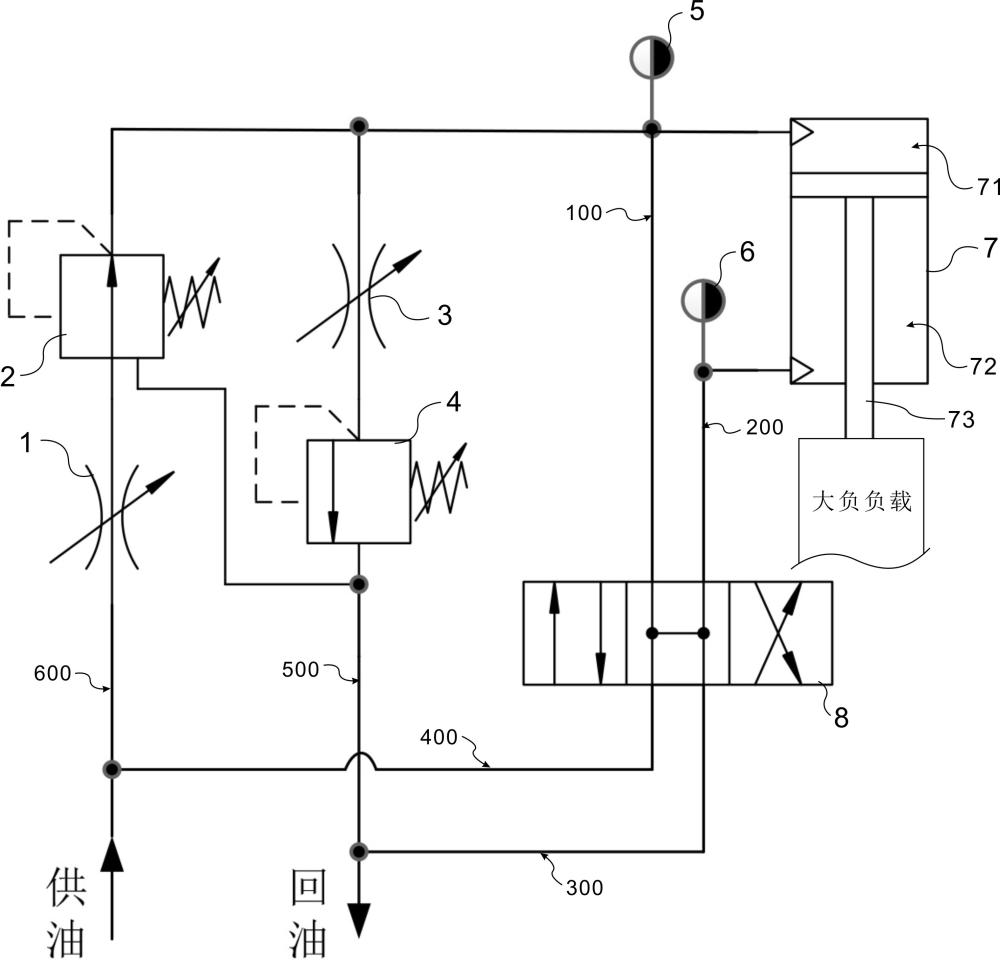
图1是本发明所述大负负载机构液压伺服调节装置的系统结构示意图。
图中:1、第一节流阀;2、减压阀;3、第二节流阀;4、溢流阀;5、上腔压力传感器;6、下腔压力传感器;7、油缸;71、上腔;72、下腔;73、伸缩杆;8、伺服比例阀;100、上腔支路;200、下腔支路;300、回油支路;400、供油支路;500、超压溢流回路;600、减压补油回路。
具体实施方式
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。
在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
如上述背景所述,在现有的技术中,大负负载机构液压伺服系统通常采用伺服比例阀直接控制油缸两腔或者仅仅控制油缸下腔的方式实现油缸位移或速度控制。采用伺服比例阀直接控制油缸两腔方式,因伺服比例阀开口与油缸面积比不匹配,常存在油缸上腔吸空或油缸下腔超压问题;采用伺服比例阀直接控制油缸下腔,会造成系统响应降低,调节速度变慢。
基于上述问题,本发明提供了一种大负负载机构液压伺服调节装置及其控制方法;本发明是通过在油缸上腔增加减压补油回路和超压溢流回路稳定油缸上腔压力,实现伺服比例阀控制油缸液压伺服系统的平稳运行、快速调节。
在一实施例中,本发明提供了一种大负负载机构液压伺服调节装置,如图1所示,所述大负负载机构包括油缸7,所述油缸连接有减压补油回路600和超压溢流回路500;
所述油缸7还连接有伺服比例阀8,该油缸7的上腔71和下腔72分别通过上腔支路100和下腔支路200与伺服比例阀8连接,该伺服比例阀8与供油支路400和回油支路300连接;其中所述油缸7的上腔71安装有上腔压力传感器5,所述油缸7的下腔72安装有下腔压力传感器6;
所述减压补油回路600一端与所述上腔支路100连通,另一端与所述供油支路400连通;
所述超压溢流回路500一端与所述上腔支路100连通,另一端与所述回油支路300连通。
进一步的,所述减压补油回路600包括第一节流阀1和减压阀2,所述减压阀2靠近油缸上腔71侧,并与所述第一节流阀1与串联,同时所述减压阀2还与所述超压溢流回路500连接。
进一步的,所述超压溢流回路500包括第二节流阀3和溢流阀4,所述溢流阀4靠近油缸的上腔71侧,并与所述溢流阀4串联。
上述技术方案核心为通过在油缸上腔增加减压补油回路和超压溢流回路稳定油缸上腔压力,实现伺服比例阀控制油缸液压伺服系统的平稳运行、快速调节。
在一实施例中,本发明提供一种大负负载机构液压伺服调节装置的控制方法,包括:
S01、关闭减压补油回路和超压溢流回路;
示例性的,关闭第一节流阀和第二节流阀。
S02、控制驱动油缸的伸缩杆73向下运动,监测油缸的上腔压力传感器和下腔压力传感器数值,若油缸的上腔压力传感器数值小于第一阈值,进入步骤S03;若油缸的下腔压力传感器数值大于油缸额定工作压力,进入步骤S04;
示例性的,打开伺服比例阀,驱动油缸的伸缩杆向下运动;监测油缸的上腔压力传感器和下腔压力传感器数值,若油缸的上腔压力传感器数值小于1.0MPa(即所述第一阈值),进入步骤S03;若油缸的下腔压力传感器数值大于油缸额定工作压力(一般是21MPa),进入步骤S04。
S03、打开减压补油回路,调高上腔压力至阈值范围,并调节下腔压力低于油缸额定工作压力,使下腔压力比油缸额定工作压力低2.0MPa~5.0MPa,优选2.0MPa。
示例性的,打开第一节流阀,缓慢调节减压阀使油缸的上腔压力传感器数值上升,同时观察油缸的下腔压力传感器数值上升情况,其中油缸的上腔压力调节范围(即所述阈值范围)为1.0MPa~5.0MPa。
S04、打开超压溢流回路,调低上腔压力至阈值范围,并调节下腔压力低于油缸额定工作压力,使下腔压力比油缸额定工作压力低2.0MPa~5.0MPa,优选2.0MPa;
示例性的,打开第二节流阀,缓慢调节减压阀使油缸上腔压力传感器数值降低,同时观察油缸下腔压力传感器数值降低情况,其中油缸的上腔压力调节范围(即所述阈值范围)为1.0MPa~5.0MPa。
S05、驱动油缸的伸缩杆向上运动,若上腔压力值小于第一阈值,进入步骤S03;若油缸下腔压力值大于油缸额定工作压力,进入步骤S04;
示例性的,打开伺服比例阀,驱动油缸的伸缩杆向上运动;监测油缸的上腔压力传感器和下腔压力传感器数值,若上腔压力传感器数值小于1.0MPa,进入步骤S03;若油缸下腔压力传感器数值大于油缸额定工作压力(一般是21MPa),进入步骤S04。
S06、按照上述步骤S02至步骤S05,完成油缸上腔和下腔的压力调节。
S07、完成步骤S06后伺服比例阀和油缸组成的液压回路投入闭环控制(例如PID控制),完成液压伺服控制参数调节。
本发明设置减压阀和溢流阀控制油缸上腔压力,解决因伺服比例阀开口与油缸面积比不匹配时造成油缸上腔吸空或者油缸下腔超过工作压力等问题,实现油缸驱动大负负载机构稳定运行,解决大负负载机构液压系统中因伺服比例阀开口与油缸面积比不匹配时造成油缸上腔吸空或者油缸下腔超过工作压力等问题,实现油缸驱动大负负载机构稳定运行。
同时本发明操作性好,控制目的、控制对象、控制方法或判断依据明确,易于执行;并且本发明适用范围广,能够同时解决大负负载机构液压伺服控制系统中油缸上腔吸空和油缸下腔超压两类问题。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 用于大负载悬臂伺服机构的多蓄能器平衡装置及设计方法
- 用于大负载悬臂伺服机构的多蓄能器平衡装置及设计方法