一种数字液压系统
文献发布时间:2024-01-17 01:24:51
技术领域
本发明涉及液压系统技术领域,更具体而言,涉及一种数字液压系统。
背景技术
工程机械装备一般具有多个液压缸,诸如挖掘机、装载机等,在工作过程中液压缸的负载压力和流量需求是实时变化的,单个液压泵供应两个以上的液压缸时,高负载的执行机构导致液压泵输出压力升高,并且低负载执行机构的控制阀节流压力损失很大;另一方面,上述液压设备中的变量柱塞泵的排量调节速度低于控制阀的阀口面积调节速度,因此液压系统会出现阀控与泵控不匹配导致的能量损失。
随着微计算机和传感器技术的发展,采用数字控制的液压元件和液压系统越来越多。Volvo公司发明了一种NorrDigi液压缸及相应的高压共轨液压系统,成功应用于挖掘机。该数字缸包含四个工作腔,每个工作腔由两个二位二通电磁阀控制,分别与高压共轨系统中的高、低压油路连通,四个工作腔的面积比为8:4:2:1,通过8个二位二通阀进行开关控制,具有16种不同的面积组合。挖掘机在工作过程中,根据三个数字缸的负载压力,实时调节数字缸的工作面积,减小不同数字缸的高、低压差导致的节流压力损失,提高了能量利用率,另一方面也获得更快的工作速度,提高工作效率;然而,为了更好地匹配数字缸的负载变化,高、低压油路的压力需要进行调节,由于存在较大的蓄能器,高、低压油路的压力调节速度会滞后于负载变化;另一方面,四腔式液压缸的制造难度大,维修难度大,工程机械恶劣的工作环境会降低其可靠性和工作寿命。
目前,诸如挖掘机和装载机等工程机械上应用最广泛的液压泵是变排量柱塞泵,其排量调节速度远低于上述数字缸的工作面积调节速度。
因此,有必要对现有技术进行改进。
发明内容
本发明旨在解决现有技术中存在的技术问题之一,为此,本发明的一个方面的目的在于,提供一种压力调节速度与负载变化速度相近的一种数字液压系统,包括数字泵、低压油源、原动机和至少两个数字缸,所述数字泵通过主供油管路与数字缸连接,数字缸通过主回油管路与低压油源连通,原动机与数字泵连接;
所述数字泵包括至少三个定排量吸排油单元,任一所述定排量吸排油单元连接有二位二通阀,所述二位二通阀的P口与定排量吸排油单元的排油口连通,二位二通阀的T口与低压油源连通;
所述定排量吸排油单元与主供油管路之间设置有单向阀。
优选的,所述数字泵的高压口连接有流量调节单元,通过流量调节单元对液压系统的流量进行调节,所述流量调节单元包括可调节流阀,可调节流阀的其中一个接口与数字泵的高压口连通,另一接口与低压油源连通。
优选的,任一所述数字缸的主进油口与主供油管路之间、主回油口与主回油管路之间均设置有流量控制阀,实现对流量的精准调节。
优选的,所述流量控制阀为可调节流阀或由一个可调节流阀和至少一个二位二通阀组成的组合件。
为了减小不同数字缸的高、低压差导致的节流压力损失,,所述数字缸包括至少两个相互独立的工作容腔,任一工作容腔均连接有单组二通阀,单组二通阀包括两个B口相互连通的二通阀,所述工作容腔与二通阀的B口连通,单组二通阀的其中一个A口与数字缸的主进油口连通,另一个A口与主回油口连通,主回油口通过主回油管路与低压油源连通,主回油管路与低压油源之间设置有背压阀。
针对控制精度要求较低的工况,可采用流量传感器对活塞杆位移进行检测,具体的,所述数字缸的其中一个工作容腔与单组二通阀之间设置有单向阀组和一个流量传感器;
所述单向阀组包括单向阀Ⅰ、单向阀Ⅱ、单向阀Ⅲ和单向阀Ⅳ,单向阀Ⅰ进油口与单向阀Ⅱ出油口连通,单向阀Ⅲ出油口与单向阀Ⅳ进油口连通,单向阀Ⅰ、单向阀Ⅳ的出油口连通,单向阀Ⅱ、单向阀Ⅲ的进油口连通,单向阀Ⅰ或单向阀Ⅳ的出油口与单向阀Ⅱ或单向阀Ⅲ的进油口连通,单向阀Ⅰ或单向阀Ⅳ的出油口与单向阀Ⅱ或单向阀Ⅲ的进油口之间设置有流量传感器;
单向阀Ⅲ的出油口或单向阀Ⅳ的进油口与单组二通阀连通,单向阀Ⅰ的进油口或单向阀Ⅱ的出油口与工作容腔连通。
所述数字缸的活塞端设置有位移传感器。
针对控制精度要求较高的工况,可采用位移传感器进行监测,具体的,所述数字缸的活塞端设置有位移传感器。
优选的,所述数字缸的主进油口、主回油口均设置有压力传感器Ⅰ。
为了实现更多的面积组合但不增加数字缸的复杂度,所述数字缸包括并联设置的液压缸Ⅰ、液压缸Ⅱ和液压缸Ⅲ,所述液压缸Ⅰ、液压缸Ⅱ和液压缸Ⅲ的缸体底部固连,液压缸Ⅰ、液压缸Ⅱ和液压缸Ⅲ的活塞杆顶部固连,液压缸Ⅰ的有杆腔与液压缸Ⅲ的有杆腔连通,液压缸Ⅰ的无杆腔与液压缸Ⅲ的无杆腔连通。
为了适用于带有回转器件的系统,还包括至少一个液压马达,所述液压马达的A口、B口分别连接有三位四通阀的A、B口,三位四通阀的P口和T口分别与主供油管路、低压油源连通,T口与低压油源之间设置有背压阀。
进一步的,还包括至少一个闭式泵,所述闭式泵与原动机连接,闭式泵的进、出油口分别连接有回转马达的进、出油口。
为了使液压系统可应用于装载机,所述数字泵设置有第一高压口和第二高压口,所述单向阀连接有三通阀Ⅰ,三通阀Ⅰ的两个出油口分别与第一高压口、第二高压口连接,所述流量调节单元与第二高压口连通,所述第一高压口、第二高压口均连接有压力传感器Ⅱ。
进一步的,还包括转向缸和转向控制阀组,所述转向控制阀组的A口、B口分别与转向缸的A口、B口连通,转向控制阀组的P口与第二高压口连通,所述转向控制阀组的EF口通过单向阀与第一高压口连通,转向控制阀的T口通过背压阀与低压油源连通。
本发明与现有技术相比所具有的有益效果为:
1、本发明的数字泵与数字缸实际均由控制阀进行控制,因此数字泵和数字缸的响应速度均比较快且接近,使该数字液压系统具有更高的响应速度,能够适应负载多变的工作场合,也避免了传统液压系统中泵控与阀控不匹配导致的压力冲击和流量损失,提高了液压系统工作效率。
2、本发明采用三个普通液压缸组成四个独立工作腔的数字缸,无需复杂结构,即可实现16种工作面积的组合。
3、本发明的数字液压系统可用与挖掘机和装载机等工程机械,通过闭式泵驱动回转马达,通过由多个定量泵组成的数字泵驱动三个数字缸,避免回转马达与其数字缸的负载差别过大导致的节流损失;通过流量调节单元与流量控制阀来快速调节数字泵输出的流量,避免流量突变导致压力冲击。
附图说明
下面将通过附图对本发明的具体实施方式做进一步的详细说明。
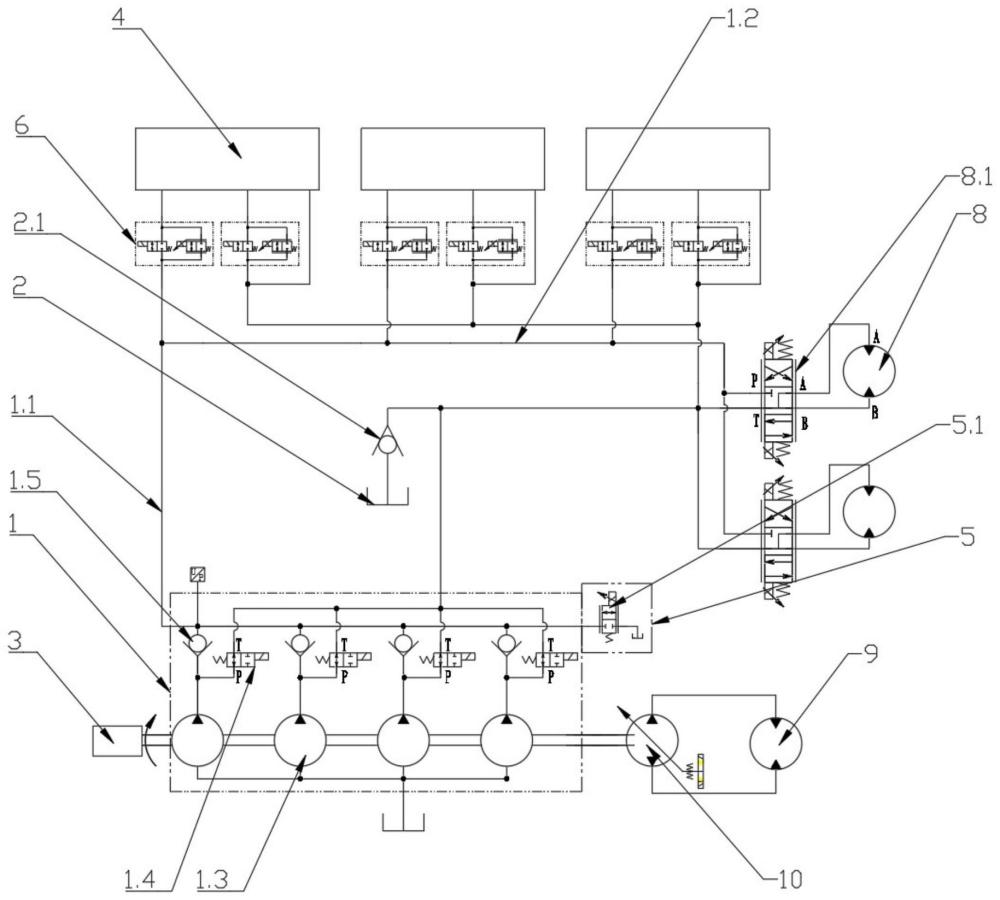
图1为本发明应用于挖掘机时的液压系统图;
图2为本发明应用于装载机时的液压系统图;
图3为本发明的一种三腔数字缸结构示意图;
图4为本发明的一种四腔数字缸结构示意图;
图5为实施例3系统控制图;
图6为实施例4系统控制图。
图中:1-数字泵,1.1-主供油管路,1.2-主回油管路,1.3-定排量吸排油单元,1.4-二位二通阀,1.5-单向阀,1.6-第一高压口,1.7-第二高压口,1.8-三通阀Ⅰ,2-低压油源,3-原动机,4-数字缸,4.1-单组二通阀,4.2-位移传感器,4.3-压力传感器Ⅰ,4.4-液压缸Ⅰ,4.5-液压缸Ⅱ,4.6-液压缸Ⅲ,5-流量调节单元,6-流量控制阀,6.1-可调节流阀,7-单向阀组,7.1-单向阀Ⅰ,7.2-单向阀Ⅱ,7.3-单向阀Ⅲ,7.4-单向阀Ⅳ,7.5-流量传感器,8-液压马达,8.1-三位四通阀,9-闭式泵,10-回转马达,11-压力传感器Ⅱ,12-转向缸,13-转向控制阀组。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
如图1、图2所示,一种数字液压系统,包括数字泵1、低压油源2、原动机3和至少两个数字缸4,数字泵1的高压口通过主供油管路1.1与数字缸4的主进油口连接,数字缸4的主回油口通过主回油管路1.2与低压油源2连通,原动机3与数字泵1连接,通过原动机3提供动力。
数字泵1包括至少三个定排量吸排油单元1.3,本实施例采用四个,定排量吸排油单元1.3为齿轮泵、叶片泵、柱塞泵的一种或多种的组合,四个定排量吸排油单元1.3的动力轴连接有同一个原动机1,任一定排量吸排油单元1.3均连接有二位二通阀1.4,二位二通阀1.4的P口与定排量吸排油单元1.3的排油口连通,二位二通阀1.4的T口与低压油源2连通,通过二位二通阀1.4的启闭控制该定排量吸排油单元1.3是否参与供油。
为了对数字泵1的流量进行调节,减小由于数字泵1流量不连续变化导致的压力冲击,数字泵1的高压口连接有流量调节单元5,流量调节单元5可采用可调节流阀或高速开关阀或现有流量调节元件。
定排量吸排油单元1.3与主供油管路1.1之间设置有单向阀1.5。
任一数字缸4的主进油口与主供油管路1.1之间、主回油口与主回油管路1.2之间均设置有流量控制阀6,通过流量控制阀6对数字缸4的流量进行控制。
流量控制阀6可以采用可调节流阀6.1,也可以采用由一个可调节流阀6.1和至少一个二位二通阀组成的组合件,本实施例采用后者。
数字缸4应包括至少两个相互独立的工作容腔,任一工作容腔均连接有单组二通阀4.1,通过单组二通阀4.1控制液压油流向,进而控制对应工作容腔的工作压力。单组二通阀4.1包括两个B口相互连通的二通阀,工作容腔与二通阀的B口连通,单组二通阀4.1的其中一个A口与数字缸4的主进油口连通,另一个A口与主回油口连通,主回油口通过主回油管路1.2与低压油源2连通,主回油管路1.2与低压油源2之间设置有背压阀2.1。
当精度要求较低时,可采用监控流量的方式对液压缸状态进行检测,具体的,数字缸4的其中一个工作容腔与单组二通阀4.1之间设置有单向阀组7和一个流量传感器7.5;单向阀组7包括单向阀Ⅰ7.1、单向阀Ⅱ7.2、单向阀Ⅲ7.3和单向阀Ⅳ7.4,单向阀Ⅰ7.1进油口与单向阀Ⅱ7.2出油口连通,单向阀Ⅲ7.3出油口与单向阀Ⅳ7.4进油口连通,单向阀Ⅰ7.1、单向阀Ⅳ7.4的出油口连通,单向阀Ⅱ7.2、单向阀Ⅲ7.3的进油口连通,单向阀Ⅰ7.1或单向阀Ⅳ7.4的出油口与单向阀Ⅱ7.2或单向阀Ⅲ7.3的进油口连通,单向阀Ⅰ7.1或单向阀Ⅳ7.4的出油口与单向阀Ⅱ7.2或单向阀Ⅲ7.3的进油口之间设置有流量传感器7.5;
单向阀Ⅲ7.3的出油口或单向阀Ⅳ7.4的进油口与单组二通阀4.1连通,单向阀Ⅰ7.1的进油口或单向阀Ⅱ7.2的出油口与工作容腔连通。使得经该单组二通阀4.1进入工作容腔的液体均经过流量传感器7.5,实现对实时流量的监测。
当控制精度要求较高时,数字缸4的活塞端应设置位移传感器4.2,通过位移传感器4.2对活塞杆状态进行监测。数字缸4的主进油口、主回油口均设置有压力传感器Ⅰ4.3。
任一工作腔与一个包含补油单向阀的溢流阀连通,包含补油单向阀的溢流阀通过背压阀7与低压油源连通。
数字缸4可采用现有技术,也可以采用本实施所公开的数字缸。本实施例以三腔数字缸为例,如图3所示,三个相互独立的工作容腔分别为A、B、C,工作容腔A、B、C的工作面积可选为6A0、4A0、2A0,工作面积比为6:4:2,A0设定为工作腔C的工作面积的一半;
按照以下表格中对三个独立工作A、B、C进行控制,获得的7种容腔组合,表中的“-4A0、-2A0”为数字缸的活塞杆收回时的工作面积,“2A0、4A0、6A0、8A0”为活塞杆伸出时的工作面积;
当单个数字缸4工作时,根据数字缸工作腔的压力,控制二通阀的启闭,获得合理的工作面积,从而使工作腔内的压力维持在一个较高且稳定的数值;
当多个数字缸4同时工作且负载实时变化时,那么多个数字缸的工作腔内的压力差值比传统两腔液压缸的压力差值要小,因此由高低负载差导致的节流损失会更小,多个数字缸会获得稳定的速度。
实施例2:
在实施例1的基础上,为了获得更多的工作面积组合,提供另一种数字缸结构,如图4所示,本实施例还公开一种四腔数字缸,具体的,数字缸4包括并联设置的液压缸Ⅰ4.4、液压缸Ⅱ4.5和液压缸Ⅲ4.6,液压缸Ⅰ4.4、液压缸Ⅱ4.5和液压缸Ⅲ4.6的缸体底部固连,液压缸Ⅰ4.4、液压缸Ⅱ4.5和液压缸Ⅲ4.6的活塞杆顶部固连,液压缸Ⅰ4.4的有杆腔与液压缸Ⅲ4.6的有杆腔连通,液压缸Ⅰ4.4的无杆腔与液压缸Ⅲ4.6的无杆腔连通,使得液压缸Ⅰ4.4、液压缸Ⅱ4.5和液压缸Ⅲ4.6一共具有四个独立腔室,分别为A、B、C、D,液压缸体1和3的缸径和杆径尺寸一致。
独立工作腔A、B、C、D的工作面积可选为8A0、4A0、2A0、1A0,工作面积比为8:4:2:1,A0为工作腔D的工作面积。
按照以下表格中对三个独立工作A、B、C、D进行控制,获得的16种容腔组合,表中的“-5A0、-4A0、-3A0、-2A0、-1A0”为数字缸的活塞杆收回时的工作面积,“1A0、2A0、3A0、4A0、5A0、6A0、7A0、8A0、9A0、10A0”为活塞杆伸出时的工作面积;
当单个数字缸工作时,根据数字缸工作腔的压力,控制二通阀,获得合理的工作面积,从而使工作腔内的压力维持在一个较高且稳定的数值;
当多个数字缸同时工作且负载实时变化时,通过二通阀的调节,多个数字缸的工作腔内的压力差值十分接近,那么由于高低负载差导致的节流损失会很小,数字缸会获得较稳定的速度。
实施例3:
如图1、图5所示,当数字液压系统应用于挖掘机时,为了同时驱动动臂、斗杆、铲斗以及行走马达,在实施例1或实施例2的基础上,还包括至少一个液压马达8,本实施例采用左行走马达和右行走马达,液压马达8的A口、B口分别连接有三位四通阀8.1的A、B口,三位四通阀8.1的P口和T口分别与主供油管路1.1、低压油源2连通,T口与低压油源2之间设置有背压阀。
为了驱动回转马达,还包括至少一个闭式泵9,闭式泵9与原动机3连接,闭式泵9的进、出油口分别连接有回转马达10的进、出油口。
数字液压系统的控制电路示意图如图5所示,其中:电手柄A的指令信号为动臂和铲斗数字缸的速度指令信号,电手柄B的指令信号为斗杆数字缸和回转马达的转速指令信号,脚踏板A的指令信号为左行走马达的速度指令信号,脚踏板B的指令信号为右行走马达的速度指令信号;
数字液压系统的工作过程为:
(1)当操作员控制电手柄A和B时,电手柄A和B向主控制器发送指令信号,同时,主控制器接收到3个数字缸内的6个压力传感器Ⅰ4.3的压力信号,并将6个压力传感器Ⅰ4.3信号进行比对,然后控制3个数字缸4内的多个二位二通电磁阀,调整3个数字缸4的面积组合,使3个数字缸4内的工作压力值尽可能接近;
(2)根据电手柄A和B的指令信号和3个数字缸的面积组合,计算得出3个数字缸4所需的总流量,通过控制数字泵1的多个二位二通电磁阀,使数字泵1的输出流量略大于三个数字缸所需的总流量,两者流量的差值通过流量调节单元5排至低压油源。
(3)根据电手柄A和B的指令信号、3个数字缸的面积组合和3个数字缸的压力传感器的压力信号,控制6个流量控制阀,对数字泵1输出的总流量进行分配,使3个数字缸4得到所需要的流量,实现操作者通过电手柄发出的速度指令;
(4)主控制器按步骤(1)~(3)执行的同时,会根据电手柄B的指令信号,控制闭式泵9的比例阀,调节泵斜盘倾角,输出回转马达10所需的流量,实现回转马达10的工作转速;
当数字泵1的输出功率和闭式泵9的输出功率之和小于原动机3额定功率的85%时,主控制器按步骤(1)~(3)执行;当数字泵1的输出功率和闭式泵9的输出功率之和超过原动机3的额定功率的85%时,主控制器将减小数字泵1的输出流量,防止原动机3转速突降或憋停;
(5)步骤3中,3个数字缸4的工作速度易受到外负载的影响,为了避免这种影响,主控制器将3个数字缸4的流量传感器7.5的流量信号与电手柄A和B的指令信号进行对比,实时调整6个流量控制阀,使3个数字缸4的工作速度与电手柄的指令信号一致;也可以通过在3个数字缸4内安装位移传感器4.2,根据位移传感器4.2的速度信号调节6个流量控制阀,避免3个数字缸的工作速度受外负载的干扰;
(6)当操作员控制脚踏板A和B时,脚踏板A和B向主控制器发送指令信号,主控制器分别向左行走控制阀和右行走控制阀发送控制信号,数字泵的输出流量分别通过左行走控制阀和右行走控制阀对应进入左行走马达和右行走马达,实现左、右行走马达的工作转速。
实施例4:
如图2、图6所示,当数字液压系统应用于装载机时,在实施例1或实施例2的基础上,还包括转向缸和转向控制阀组,数字泵1设置有第一高压口1.6和第二高压口1.7,单向阀1.5连接有三通阀Ⅰ1.8,三通阀Ⅰ1.8的两个出油口分别与第一高压口1.6、第二高压口1.7连接,流量调节单元5与第二高压口1.7连通,第一高压口1.6、第二高压口1.7均连接有压力传感器Ⅱ11。
转向控制阀组13的A口、B口分别与转向缸12的A口、B口连通,转向控制阀组13的P口与第二高压口1.7连通,所述转向控制阀组13的EF口通过单向阀与第一高压口1.6连通,转向控制阀13的T口通过背压阀与低压油源2连通。
数字液压系统的控制电路示意图如图6所示,其中:电手柄的指令信号为动臂和转斗数字缸的速度指令信号,转向盘的指令信号为转向缸的速度指令信号;
数字液压系统的工作过程为:
(1)当操作员控制转向盘和电手柄时,转向盘和电手柄向主控制器发送指令信号,同时,主控制器接收到动臂和转斗数字缸内的压力传感器Ⅰ4.1内的工作压力信号,将动臂和转斗数字缸的压力信号进行比对,然后控制动臂和转斗数字缸内的多个二位二通电磁阀,调整动臂和转斗数字缸的面积组合,使动臂和转斗数字缸内的工作压力尽可能接近;
(2)根据电手柄的指令信号和动臂、转斗数字缸的面积组合,分别计算得出动臂和转斗数字缸所需的流量之和,通过控制数字泵1的多个二位二通电磁阀以及流量调节单元5,使数字泵1的输出流量略小于动臂和转斗数字缸所需的流量之和;同时,主控制器控制数字泵1内的多个电磁阀,使数字泵1向转向缸12输出的流量略大于转向缸12所需流量;且数字泵1总的输出流量接近三个数字缸4所需的总流量,两者流量的差值通过流量调节单元5排至低压油源;
(3)根据电手柄指令信号、动臂、转斗数字缸的面积组合和两缸内部压力信号,控制4个流量控制阀,对流量进行分配,使动臂和转斗数字缸得到所需要的流量;
(4)当数字泵1的输出功率之和小于原动机3额定功率的85%时,主控制器按步骤(1)~(3)执行;当数字泵1的输出功率之和超过原动机3的额定功率的85%时,主控制器将减小数字泵1的输出流量,防止原动机3转速突降或憋停;
(5)步骤(3)中,动臂和转斗数字缸的工作速度易受到外负载的影响,为了避免这种影响,主控制器将2个数字缸4的流量传感器7.5的流量信号与电手柄的指令信号进行对比,实时调整4个流量控制阀,使动臂和转斗数字缸的工作速度与电手柄的指令信号一致;也可以通过在2个数字缸4内安装位移传感器4.2,根据位移传感器4.2的速度信号调节4个流量控制阀,避免外负载对动臂和转斗数字缸的工作速度的干扰。
与高压共轨技术相比,采用多泵式数字泵为数字缸供液,数字缸速度更容易控制,装载机的动臂、转斗采用多腔式数字缸,有效减少高压差导致的节流损失。
上面仅对本发明的较佳实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化,各种变化均应包含在本发明的保护范围之内。