一种双数字泵的数字液压系统
文献发布时间:2024-01-17 01:24:51
技术领域
本发明涉及液压系统技术领域,更具体而言,涉及一种双数字泵的数字液压系统。
背景技术
挖掘机或装载机均为典型的具有多执行机构的液压传动机械设备,当多个执行机构发生复合动作时,执行机构的负载压力和流量需求实时变化,单个液压泵供应两个以上执行机构时,高负载的执行机构导致液压泵输出压力升高,低负载执行机构的控制阀存在很大的节流压力损失。
太原理工大学权龙教授发明了三腔液压缸,用于挖掘机动力势能回收,提高了能量利用率。Volvo公司发明了一种NorrDigi液压缸,该数字缸包含四个工作腔,四个工作腔的面积比按照等比数列设计,即8:4:2:1,通过8个二位二通阀对四个工作腔的进、回油进行独立控制,形成了16种不同的面积组合。挖掘机在工作过程中,根据数字缸的负载压力,实时调节三个数字缸的工作面积,减小了三个数字缸间的高、低压差导致的节流压力损失,提高了能量利用率。
但目前该技术存在三个主要问题:一、目前数字缸采用高压共轨技术,仅通过控制阀改变油缸有效工作面积来控制数字缸的工作速度,难度较大;二、如果采用装载机常用的负载敏感变排量柱塞泵对多腔数字缸进行供液,其流量调节速度远低于数字缸的控制阀频率要求,泵控滞后于阀控会导致能量损失;三、当执行机构间的工作压差较大时,四腔式数字缸的有杆腔的最小和最大工作面积为1:5,难以完全弥补该压差。
因此,有必要对现有技术进行改进。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一,为此,本发明的一个方面的目的在于,提供一种适用于更大工作压差的双数字泵的数字液压系统。
为了实现上述目的,本发明一个方面的实施例提供一种双数字泵的数字液压系统,包括第一数字泵、第二数字泵和至少两个数字液压缸Ⅰ;所述数字液压缸Ⅰ的进油口分别与第一数字泵、第二数字泵的高压口连通,数字液压缸Ⅰ的回油口与低压油源连通;所述第一数字泵、第二数字泵均连接有原动机;
所述第一数字泵包括至少三个定排量泵Ⅰ,任一定排量泵Ⅰ的排油口并联连接有单向阀和二通阀Ⅰ,单向阀的出油口与第一数字泵的高压口连通,二通阀Ⅰ的B口与定排量泵Ⅰ的出油口连通,二通阀Ⅰ的A口与第一数字泵的低压口连通;
所述第二数字泵包括至少三个定排量泵Ⅱ,任一定排量泵Ⅱ的出油口均并联连接有单向阀和二通阀Ⅱ,二通阀Ⅱ的B口与定排量泵Ⅱ的出油口连通,二通阀的A口与第二数字泵的低压口连通,单向阀出油口与第二数字泵的高压口连通;
所述数字液压缸Ⅰ包括至少两个相互独立的工作容腔。
另外,根据本发明上述实施例提供的一种数字液压缸,还具有如下附加技术特征:
根据实际工况需要,所述原动机设置为一个并通过分动箱分别与第一数字泵、第二数字泵连接,或原动机设置为两个且两个原动机的输出轴分别与第一数字泵、第二数字泵连接。
为了对油路提供背压,第一数字泵和/或第二数字泵的低压口与低压油源之间设置有背压阀。
为了对进出数字液压缸Ⅰ的液压油精确控制,任一所述数字液压缸Ⅰ的主进油口与第一数字泵的高压口之间、主回油口与第一数字泵的低压口之间均设置有流量控制阀。
进一步的,所述流量控制阀为可调节流阀Ⅰ或由一个可调节流阀Ⅰ和至少一个二位二通阀组成的组合件。
为了对数字液压缸Ⅰ和其他液压元件分别供油,所述第二数字泵设置有第一高压口和第二高压口,第二数字泵的单向阀出油口对应连接有三通阀Ⅱ并与三通阀Ⅱ的合流口连通,任一三通阀Ⅱ的两个分流口分别与第二数字泵的第一高压口、第二高压口连通。
为了对油压进行监测,所述第一数字泵的高压口设置有压力传感器Ⅰ;所述第二数字泵的第二高压口设置有压力传感器Ⅱ。
为了对数字泵的输出流量进行调节,所述第二数字泵连接有流量调节单元Ⅰ,所述流量调节单元Ⅰ包括可调节流阀Ⅱ,所述可调节流阀Ⅱ其中一个接口与第二数字泵的第二高压口连通,另一接口与低压油源连通。
为了适配双高压口的第二数字泵,第二数字泵与可调节流阀Ⅱ之间设置有三通阀Ⅲ,第二数字泵的第一高压口、第二高压口分别与三通阀Ⅲ的两个分流口连通,三通阀Ⅲ的合流口与可调节流阀Ⅱ连通。
当液压系统应用于挖掘机时,还包括左行走马达、右行走马达和回转马达,所述左行走马达、右行走马达、回转马达分别连接有左行走控制阀、右行走控制阀及回转控制阀;所述左行走控制阀、回转控制阀的进油口连接有同一个直线行走阀并分别与直线行走阀的A、B口连接,所述直线行走阀的A’口、B’口分别与第一数字泵的第一高压口、第二数字泵的第二高压口连接;所述右行走控制阀的P口与第二数字泵的第二高压口连通,左行走控制阀、右行走控制阀和回转控制阀的T口均与低压油源连通。
进一步的,为了对挖掘机斗杆进行控制,还包括数字液压缸Ⅱ,数字液压缸Ⅱ的主进油口与直线行走阀的B口连通,主回油口与低压油源连通,所述数字液压缸Ⅱ的主进油口、主回油口均连接有流量控制阀。
进一步的,为了与第二数字泵协同供油,第一数字泵设置有第一高压口和第二高压口且分别与第二数字泵的第一高压口、第二高压口连通;
第一数字泵的单向阀出油口连接有三通阀Ⅰ的合流口,所述三通阀Ⅰ的两个分流口分别与第一数字泵的第一高压口、第二高压口连通。
进一步的,所述第一数字泵的第一高压口和第二数字泵的第二高压口之间设置有可调节流阀Ⅲ。
进一步的,所述第一数字泵的高压口连接有流量调节单元Ⅱ。
当液压系统应用于装载机时,还包括转向缸和转向控制阀,所述转向控制阀的A口、B口分别与转向缸的A口、B口连通,转向控制阀的P口与第二数字泵的第二高压口连通,转向控制阀的T口与低压油源连通。
进一步的,所述数字液压缸Ⅰ的任一独立工作容腔均设置有独立油口,任一所述独立油口均连接有二通阀组,所述二通阀组包括两个B口相互连通的二通阀,所述独立油口与二通阀的B口连通,二通阀组的其中一个A口与数字液压缸的进油口连通,另一个A口与数字液压缸回油口连通;
所述数字液压缸的进油口、回油口均设置有压力传感器。
进一步的,其中一个所述独立油口与二通阀组Ⅱ之间设置有单向阀组和一个流量传感器;
所述单向阀组包括单向阀Ⅰ、单向阀Ⅱ、单向阀Ⅲ和单向阀Ⅳ,单向阀Ⅰ进油口与单向阀Ⅱ出油口连通,单向阀Ⅲ出油口与单向阀Ⅳ进油口连通,单向阀Ⅰ、单向阀Ⅳ的出油口连通,单向阀Ⅱ、单向阀Ⅲ的进油口连通,单向阀Ⅰ或单向阀Ⅳ的出油口与单向阀Ⅱ或单向阀Ⅲ的进油口连通,单向阀Ⅰ或单向阀Ⅳ的出油口与单向阀Ⅱ或单向阀Ⅲ的进油口之间设置有流量传感器;
单向阀Ⅲ的出油口或单向阀Ⅳ的进油口与二通阀组Ⅱ连通,单向阀Ⅰ的进油口或单向阀Ⅱ的出油口与独立油口连通。
进一步的,所述数字液压缸包括滑动套接的外缸体和外活塞杆,所述外缸体中部沿轴线方向固设有内活塞杆,外活塞杆下端固设有活塞Ⅰ,活塞Ⅰ的内壁与内活塞杆滑动连接,活塞Ⅰ的外壁与外缸体滑动连接,外活塞杆外壁将外缸体内腔分割为空腔A和空腔B,外活塞杆中部设置有下端开口的空腔,所述内活塞杆上端固设有活塞Ⅱ且活塞Ⅱ的外侧壁与外活塞杆的内壁滑动连接,内活塞杆外壁将外活塞杆内腔分割为空腔C和空腔D,所述内活塞杆内部沿轴向设置有圆柱腔,所述外缸体内部固设柱塞,所述柱塞与圆柱腔配合并形成空腔E。
本发明与现有技术相比所具有的有益效果为:
1、本发明液压系统的数字泵与数字缸实际均由二位二通阀进行控制,因此数字泵和数字缸的响应速度均比较快且接近,使该数字液压系统具有更高的响应速度,能够适应负载多变的工作场合,也避免了传统液压系统中泵控与阀控不匹配导致的压力冲击和流量损失;与高压共轨技术相比,采用多泵式数字泵为数字缸供液,数字缸速度更容易控制。
2、当本发明应用于挖掘机时,第一数字泵对铲斗、动臂供油,第二数字泵对回转和斗杆进行单独供油,避免了由于回转马达以及斗杆压力较低,发生节流损失,两个数字泵还可以实现直线行走功能、双泵合流功能,极大提高了液压系统能量效率和工作效率。
3、当本发明应用于装载机时,装载机的动臂、转斗采用多腔式数字缸,转向杆采用第二数字泵单独供油,有效减少高压差导致的节流损失。
4、本发明提供的一种数字液压缸,包含五个工作腔,有杆腔的最小面积和最大面积比可达到1:10,五腔式的液压缸相较四腔式数字缸,面积组合数目可提高一倍,更好弥补不同油缸的压力差值。
附图说明
下面将通过附图对本发明的具体实施方式做进一步的详细说明。
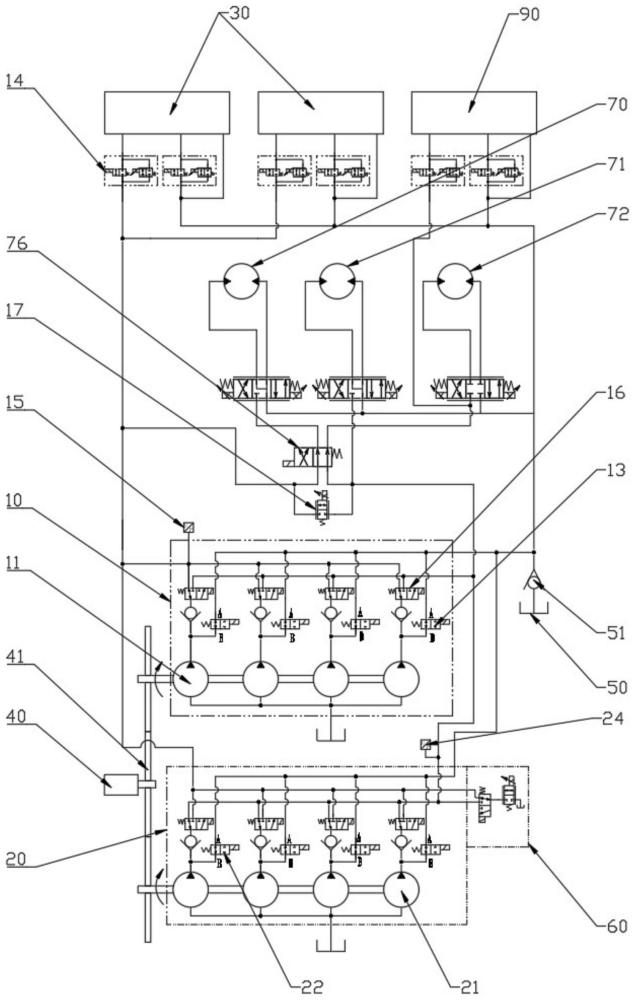
图1为液压系统的一种结构示意图;
图2为图1中数字泵的放大示意图;
图3为图1中数字缸的放大示意图;
图4为实施例2的系统控制图;
图5为液压系统的另一种结构示意图;
图6为实施例3的系统控制图;
图7为数字液压缸的一种结构示意图。
图中:10-第一数字泵,11-定排量泵Ⅰ,12-单向阀,13-二通阀Ⅰ,14-流量控制阀,15-压力传感器Ⅰ,16-三通阀Ⅰ,17-可调节流阀Ⅲ,20-第二数字泵,21-定排量泵Ⅱ,22-二通阀Ⅱ,23-三通阀Ⅱ,24-压力传感器Ⅱ,30-数字液压缸Ⅰ,31-外缸体,32-外活塞杆,33-内活塞杆,34-活塞Ⅰ,35-活塞Ⅱ,36-柱塞,37-二通阀组,38-压力传感器,40-原动机,41-分动箱,50-低压油源,51-背压阀,60-流量调节单元Ⅰ,61-可调节流阀Ⅱ,62-三通阀Ⅲ,63-流量调节单元Ⅱ,70-左行走马达,71-右行走马达,72-回转马达,73-左行走控制阀,74-右行走控制阀,75-回转控制阀,76-直线行走阀,77-转向缸,78-转向控制阀,80-单向阀组,81-单向阀Ⅰ,82-单向阀Ⅱ,83-单向阀Ⅲ,84-单向阀Ⅳ,85-流量传感器。90-数字液压缸Ⅱ。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
如图所示,一种双数字泵的数字液压系统,包括第一数字泵10、第二数字泵20和至少两个数字液压缸30;数字液压缸30包括至少两个相互独立的工作容腔,数字液压缸30的进油口分别与第一数字泵10、第二数字泵20的高压口连通,通过第一数字泵10和/或第二数字泵20单独或同时对数字液压缸供油。
数字液压缸30的回油口与低压油源50连通;低压油源50入口设置有背压阀51,第一数字泵10、第二数字泵20均连接有原动机40,原动机40可以设置为一个也可以设置为两个。设置为一个时,通过分动箱41分别与第一数字泵10、第二数字泵10连接;设置为两个时,两个原动机的输出轴分别与第一数字泵10、第二数字泵10连接。本实施例原动机设置为一个,通过一个原动机41同时带动第一数字泵10、第二数字泵20运转。
第一数字泵10包括至少三个定排量泵Ⅰ11,任一定排量泵Ⅰ11的排油口并联连接有单向阀12和二通阀Ⅰ13,单向阀12的出油口与第一数字泵10的高压口连通。二通阀Ⅰ13的B口与定排量泵Ⅰ11连通,二通阀Ⅰ13的A口与第一数字泵10的低压口连通,低压口连接有背压阀和低压油源50。
第二数字泵20包括至少三个定排量泵Ⅱ21,任一定排量泵Ⅱ21的出油口均并联连接有单向阀12和二通阀Ⅱ22,二通阀Ⅱ22采用二位二通电磁阀,二通阀Ⅱ22的B口与定排量泵Ⅱ21的出油口连通,二通阀22的A口与第二数字泵20的低压口连通;单向阀12出油口与第二数字泵20的高压口连通。
根据使用需求,第二数字泵的高压口数量可设置一个也可设置两个,本实施例中,第二数字泵20设置有第一高压口和第二高压口,第二数字泵20的单向阀12出油口连接有三通阀Ⅱ23的合流口,三通阀Ⅱ23的两个分流口分别与第二数字泵20的第一高压口、第二高压口连通;通过三通阀Ⅱ控制第二数字泵20的定排量泵Ⅱ21供油方向。第二数字泵的第一高压口与第一数字泵的第一高压口连通,实现与第一数字泵的合流并对数字液压泵Ⅰ30供油;第二数字泵20的第二高压口主要用于对第二数字泵20以外的液压元件进行供油。
第二数字泵20的第二高压口连通有流量调节单元Ⅰ60,通过流量调节单元Ⅰ60减小由于数字泵流量不连续变化导致的压力冲击。流量调节单元Ⅰ60包括可调节流阀Ⅱ61,可调节流阀Ⅱ61其中一个接口与第二数字泵20的第二高压口连通,另一接口与低压油源50连通。
流量调节单元Ⅰ60还可对第二数字泵20的第一高压口的流量进行调节,具体的,在第二数字泵20与可调节流阀Ⅱ61之间设置三通阀Ⅲ62,第二数字泵20的第一高压口、第二高压口分别与三通阀Ⅲ62的两个分流口连通,三通阀Ⅲ62的合流口与可调节流阀Ⅱ61连通,通过改变三通阀Ⅲ62的工作位,实现对第一高压口、第二高压口的切换。
任一数字液压缸Ⅰ30的主进油口与第一数字泵10的第一高压口之间、主回油口与第一数字泵10的低压口之间均设置有流量控制阀14,流量控制阀14为可调节流阀或由一个可调节流阀和至少一个二位二通阀组成的组合件,本实施例采用可调节流阀和二位二通阀组成的组合件,便于对液压油进行更精确的控制。
第一数字泵10的高压口设置有压力传感器Ⅰ15;第二数字泵20的第二高压口设置有压力传感器Ⅱ24。
实施例2:
如图1至图4所示,当本申请应用于挖掘机系统时,在实施例1的基础上,铲斗液压缸和动臂液压缸采用实施例1所公开的数字液压缸Ⅰ30,斗杆液压缸采用数字液压缸Ⅱ90。还包括左行走马达70、右行走马达71和回转马达72,左行走马达70、右行走马达71、回转马达72分别连接有左行走控制阀73、右行走控制阀74及回转控制阀75,通过左行走控制阀73、右行走控制阀74或回转控制阀75控制左行走马达70、右行走马达71和回转马达72的正反转。
为了对数字液压缸Ⅰ30、数字液压缸Ⅱ90分别供油,第一数字泵10设置有第一高压口和第二高压口,第一数字泵10的单向阀12出油口连接有三通阀Ⅰ13的合流口,三通阀Ⅰ13的两个分流口分别与第一数字泵10的第一高压口、第二高压口连通,第一数字泵10的第一高压口、第二高压口分别与第二数字泵20的第一高压口、第二高压口连通;第一数字泵10的第一高压口、第二高压口之间设置有可调节流阀Ⅲ17,通过可调节流阀Ⅲ17实现交叉供油。
左行走控制阀73、回转控制阀75的进油口连接有同一个直线行走阀76并分别与直线行走阀76的A、B口连接,直线行走阀76的A’口、B’口分别与第一数字泵10的第一高压口、第二高压口连接;右行走控制阀74的P口与第二数字泵20的第二高压口连通,左行走控制阀70、右行走控制阀71和回转控制阀72的T口均与低压油源连通。
数字液压缸Ⅱ90的主进油口与直线行走阀76的B口连通,主回油口与低压油源连通,数字液压缸Ⅱ90的主进油口、主回油口均连接有流量控制阀14。
第二数字泵20的第二高压口与流量调节单元的可调节流阀之间设置有三通阀Ⅲ,三通阀Ⅲ的另一工作口与第二数字泵20的第一高压口连通。
数字液压系统的控制电路示意图如图4所示,其中,电手柄A的指令信号为动臂和铲斗数字缸的速度指令信号,电手柄B的指令信号为斗杆数字缸和回转马达的转速指令信号,脚踏板A的指令信号为左行走马达的速度指令信号,脚踏板B的指令信号为右行走马达的速度指令信号;
挖掘机数字液压系统的工作过程为:
1)当操作员控制电手柄A和B时,电手柄A和B向主控制器发送指令信号,同时,主控制器接收到3个数字液压缸和回转马达内的工作压力信号,将铲斗数字缸和动臂数字缸的压力信号进行比对,将斗杆数字缸和回转马达内的压力信号进行对比,然后控制3个数字液压缸内的多个二位二通电磁阀,调整3个数字液压缸的面积组合,使动臂数字缸和铲斗数字缸内的工作压力尽可能接近,斗杆数字缸和回转马达内的工作压力尽可能接近;
2)根据电手柄A和B的指令信号和3个数字液压缸的面积组合,分别计算得出铲斗和动臂数字缸所需的流量之和、斗杆数字缸和回转马达所需的流量之和,当第一数字泵10工作压力大于等于(或小于)第二数字泵20工作压力时,通过三通阀Ⅲ62将第一数字泵10(或第二数字泵20)与可调节流阀Ⅱ61连通,第一数字泵10的输出流量略大于(或略小于)动臂和铲斗缸的流量之和,第二数字泵20的流量略小于(或略大于)斗杆缸和回转马达的所需流量,第一数字泵、第二数字泵20的流量通过可调节流阀Ⅲ17进行调节,第一数字泵10和第二数字泵20的流量略大于四个执行机构的流量之和,多余的流量通过可调节流阀Ⅱ61排至低压油源。
3)根据电手柄A的指令信号、铲斗和动臂数字缸的面积组合以及铲斗、动臂数字缸内的压力信号,控制对应的4个流量控制阀14,对第一数字泵10输出的流量进行分配,使铲斗和动臂数字缸得到所需要的流量,实现操作者通过电手柄发出的速度指令;同理,根据电手柄B的指令信号、斗杆数字缸的面积组合以及斗杆数字缸、回转马达的压力传感器85的压力信号,对第二数字泵20输出的流量进行分配,使斗杆数字缸和回转马达72得到所需要的流量。
4)当第一、第二数字泵的输出功率之和小于原动机额定功率的85%时,主控制器按步骤(1)~(3)执行;当第一数字泵10、第二数字泵20的输出功率之和超过原动机40的额定功率的85%时,主控制器将减小第一、第二数字泵的输出流量,防止原动机40转速突降或憋停;
5)步骤3中,3个数字液压缸的工作速度易受到外负载的影响,为了避免这种影响,主控制器将3个数字液压缸的流量传感器85的流量信号与电手柄A和B的指令信号进行对比,实时调整对应的6个流量控制阀,使3个数字液压缸的工作速度与电手柄的指令信号一致;也可以通过在3个数字液压缸内安装位移传感器,根据位移传感器的速度信号调节6个流量控制阀,避免外负载对3个数字液压缸的工作速度的干扰;
6)当挖掘机处于正常行走工况时,当操作员控制脚踏板A和B时,脚踏板A和B向主控制器发送指令信号,主控制器分别向左行走控制阀73和右行走控制阀74的电比例阀发送控制信号,第一数字泵10、第二数字泵20的输出流量通过直线行走阀76后,分别经过左行走控制阀73和右行走控制阀74对应进入左行走马达70和右行走马达71,实现左、右行走马达的工作转速。
7)当挖掘机处于直线行走工况时,主控制器使直线行走阀76切换到左位,第一数字泵10的流量一方面进入动臂和铲斗数字缸,一方面通过直线行走阀76进入回转马达72和斗杆数字缸;第二数字泵20的流量一方面进入右行走马达71,一方面通过直线行走阀76进入左行走马达70。
数字泵与数字缸实际均由控制阀进行控制,因此数字泵和数字缸的响应速度均比较快且接近,使该数字液压系统具有更高的响应速度,能够适应负载多变的工作场合,也避免了传统液压系统中泵控与阀控不匹配导致的压力冲击和流量损失,另一方面数字泵组由两个数字泵组成,第一数字泵对铲斗、动臂进行供油,第二数字泵对回转和斗杆进行单独供油,两个数字泵还可以实现直线行走功能、双泵合流功能,极大提高了液压系统能量效率和工作效率。
实施例3:
如图5、图6所示,当本申请应用于装载机系统时,在实施例1的基础上,数字液压缸Ⅰ30应设置2个并分别作为动臂数字缸和转斗数字缸,除此之外,还包括转向缸77和转向控制阀78,转向控制阀77的A口、B口分别与转向缸的A口、B口连通,转向控制阀78的P口与第二数字泵20的第二高压口连通,转向控制阀78的T口与低压油源连通。通过转向控制阀78对转向缸77进行控制。
第一数字泵10的高压口连接有流量调节单元,流量调节单元与实施例1中的流量调节单元60结构相同。
数字液压系统的控制电路示意图如图6所示,其中,电手柄的指令信号为动臂和转斗数字缸的速度指令信号,转向盘的指令信号为转向缸的速度指令信号;
所述数字液压系统的工作过程为:
1)当操作员控制电手柄时,电手柄向主控制器发送指令信号,同时,主控制器接收到动臂和转斗数字缸内的压力传感器38的工作压力信号,将动臂和转斗数字缸的压力信号进行比对,然后控制动臂和转斗数字缸内的多个二位二通电磁阀,调整动臂和转斗数字缸的面积组合,使动臂和转斗数字缸内的工作压力尽可能接近;
2)根据电手柄的指令信号和动臂、转斗数字缸的面积组合,分别计算得出动臂和转斗数字缸所需的流量之和,通过控制第一数字泵10、第二数字泵20的多个二位二通电磁阀,使第一数字泵10的输出流量略大于动臂和转斗数字缸所需的流量之和;两者流量的差值通过流量调节单元Ⅱ63排至低压油源;
当操作员控制转向盘时,转向盘向主控制器发送指令信号,主控制器控制第二数字泵内的多个电磁阀,使第二数字泵20的流量略大于转向缸的所需流量;两者流量的差值通过流量调节单元Ⅰ60排至低压油源;
3)根据电手柄指令信号、动臂、转斗数字缸的面积组合和内部压力信号,控制对应4个流量控制阀14对流量进行分配,使动臂和转斗数字缸得到所需要的流量,实现操作者通过电手柄发出的速度指令;
4)当第一、第二数字泵的输出功率之和小于原动机额定功率的85%时,主控制器按步骤(1)~(3)执行;当第一数字泵10、第二数字泵20的输出功率之和超过原动机40的额定功率的85%时,主控制器将减小第一数字泵10的输出流量,保障转向缸77的工作速度,防止原动机40转速突降或憋停;
5)步骤(3)中,动臂和转斗数字缸的工作速度易受到外负载的影响,为了避免这种影响,主控制器将2个数字缸的流量传感器85的流量信号与电手柄的指令信号进行对比,实时调整4个流量控制阀,使动臂和转斗数字缸的工作速度与电手柄的指令信号一致;也可以通过在2个数字缸内安装位移传感器,根据位移传感器的速度信号调节4个流量控制阀,避免外负载对动臂和转斗数字缸的工作速度的干扰;
实施例4:
本申请所述数字液压缸Ⅰ30或数字液压缸Ⅱ90可以采用现有技术中三腔及以上独立工作腔的数字缸也可以采用本实施例所公开的数字液压缸,数字液压缸的任一独立工作容腔均设置有独立油口,数字液压缸30的进油口、回油口均设置有压力传感器38。
如图7所示,一种数字液压缸,包括滑动套接的外缸体31和外活塞杆32,外缸体31中部沿轴线方向固设有内活塞杆33,外活塞杆32下端固设有活塞Ⅰ34,活塞Ⅰ34的内壁与内活塞杆33滑动连接,活塞Ⅰ34的外壁与外缸体31滑动连接,外活塞杆32外壁将外缸体31内腔分割为空腔A和空腔B,外活塞杆32中部设置有下端开口的空腔,所述内活塞杆33上端固设有活塞Ⅱ35且活塞Ⅱ35的外侧壁与外活塞杆32的内壁滑动连接,内活塞杆33外壁将外活塞杆32内腔分割为空腔C和空腔D,所述内活塞杆33内部沿轴向设置有圆柱腔,所述外缸体31内部固设柱塞36,所述柱塞36与圆柱腔配合并形成空腔E,空腔A、空腔B、空腔C、空腔D、空腔E均设置有独立油口。
空腔A、空腔B、空腔C、空腔D、空腔E均连接有独立油口,分别为油口a、b、c、d、e。空腔D的油口d设置在外缸体31的下端并通过设置在内活塞杆5.3中的油道与空腔D连通。
任一独立油口均连接有二通阀组37,二通阀组37包括两个B口相互连通的二位二通电磁阀,独立油口与二位二通电磁阀的B口连通,二通阀组37的其中一个A口与数字液压缸30的进油口连通,另一个A口与数字液压缸30回油口连通。
其中一个独立油口与二通阀组37之间设置有单向阀组80和一个流量传感器85,本实施例采用e口。单向阀组80包括单向阀Ⅰ81、单向阀Ⅱ82、单向阀Ⅲ83和单向阀Ⅳ84,单向阀Ⅰ81进油口与单向阀Ⅱ82出油口连通,单向阀Ⅲ83出油口与单向阀Ⅳ84进油口连通,单向阀Ⅰ81、单向阀Ⅳ84的出油口连通,单向阀Ⅱ82、单向阀Ⅲ83的进油口连通,单向阀Ⅰ81或单向阀Ⅳ84的出油口与单向阀Ⅱ82或单向阀Ⅲ83的进油口连通,单向阀Ⅰ81或单向阀Ⅳ84的出油口与单向阀Ⅱ82或单向阀Ⅲ83的进油口之间设置有流量传感器85;单向阀Ⅲ83的出油口或单向阀Ⅳ84的进油口与二通阀组Ⅱ37连通,单向阀Ⅰ81的进油口或单向阀Ⅱ82的出油口与独立油口连通。使得经该单向阀组80进入工作容腔的液体均经过流量传感器85,实现对实时流量的监测。
本实施例所涉及到的电磁阀均通过信号线与数字缸控制器连接,压力传感器的信号线与数字缸控制器连接,数字缸控制器的信号线与主控制器连接。
当设定五个工作腔A、B、C、D、E的面积比为16:8:4:2:1时,按照以下表格中对五个独立工作A、B、C、D进行控制,获得的32种容腔组合,A0为最小工作腔的面积,表中的“-10A0、-9A0、-8A0、-7A0、-6A0、-5A0、-4A0、-3A0、-2A0、-1A0”为数字缸的活塞杆收回时的工作面积,“1A0、2A0、3A0、4A0、5A0、6A0、7A0、8A0、9A0、10A0、11A0、12A0、13A0、14A0、15A0、16A0、17A0、18A0、19A0、20A0、21A0”为活塞杆伸出时的工作面积;
上面仅对本发明的较佳实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化,各种变化均应包含在本发明的保护范围之内。