整体箱推板与料斗复合动作的控制方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及垃圾压缩技术领域,具体涉及整体箱推板与料斗复合动作的控制方法。
背景技术
现有技术中,垃圾压缩类的整体式垃圾压缩箱受限于装机功率,推板与料斗不能同时动作或有限的联动。这种工作模式:1、推板在进行垃圾压缩作业时,料斗无法进行垃圾上料作业,或料斗在进行垃圾上料作业时,推板无法进行垃圾压缩作业,作业效率较低;2、当其中一个压力油源故障,设备无法工作,垃圾无法及时清运。为了改变以上这些现状,本发明提出一种新型的整体箱推板与料斗复合动作的控制方法。
发明内容
本发明的目的在于克服现有技术的不足,提供一种整体箱推板与料斗复合动作的控制方法。
为实现上述目的,本发明采用以下技术方案:
整体箱推板与料斗复合动作的控制方法,该控制方法所基于的液压系统包括液压双联泵、三位四通电磁换向阀a、差动阀、推板油缸、三位四通电磁换向阀b、料斗油缸、电磁溢流阀a和电磁溢流阀b;
所述液压双联泵的第一液压泵出口通过管路连接于三位四通电磁换向阀a的压力油口P,三位四通电磁换向阀a的回油口通过管路接回油箱,三位四通电磁换向阀a的A口通过管路连接到推板油缸的无杆腔,三位四通电磁换向阀a的B口通过管路连接到差动阀的T口,差动阀的A口通过管路连接到推板油缸的有杆腔,差动阀的P口通过管路并接到三位四通电磁换向阀a的A口与推板油缸无杆腔之间的油路上;在第一液压泵和三位四通电磁换向阀a压力油口P之间装有单向节流阀a,在单向节流阀a和三位四通电磁换向阀a之间的推板压力油路上并接有压力传感器a,在第一液压泵和单向节流阀a之间的油路上并接有油路接于电磁溢流阀a的进油口,电磁溢流阀a的回油口通过管路接回油箱;
所述液压双联泵的第二液压泵出口通过管路连接于三位四通电磁换向阀b的压力油口P,三位四通电磁换向阀b的回油口T通过管路接回油箱,三位四通电磁换向阀b的A口和B口通过管路分别接于料斗油缸的无杆腔和有杆腔;在第二液压泵和三位四通电磁换向阀b压力油口P之间装有单向节流阀b,在单向节流阀b和三位四通电磁换向阀b之间的料斗压力油路上并接有压力传感器b,在第二液压泵和单向节流阀b之间的油路上并接有油路接于电磁溢流阀b的进油口,电磁溢流阀b的回油口通过管路接回油箱;
在推板压力油路和料斗压力油路之间并接有合流阀。
本发明的控制方法具体为:
(1)、推板和料斗同时动作:
①、启动推板压缩循环和料斗上料动作,电磁溢流阀a、电磁溢流阀b、三位四通电磁换向阀a、三位四通电磁换向阀b和差动阀的电磁铁DT2、DT3、DT4、DT6、DT7得电,第一液压泵输出的压力油通过单向节流阀a的单向阀进入三位四通电磁换向阀a的压力油口P,从三位四通电磁换向阀a的A口出去,进入推板油缸无杆腔,从而驱动推板油缸伸出,推动推板推出压缩垃圾,推板油缸有杆腔出来的液压油通过差动阀,从差动阀P口出来后也进入推板油缸无杆腔,从而加速驱动推板油缸伸出;当压力传感器a数值达到设定的差动切换压力值1时,差动阀的电磁铁DT6失电,推板油缸有杆腔出来的液压油通过差动阀,从差动阀T口出来后进入三位四通电磁换向阀a的B口,再从三位四通电磁换向阀a的T口出来流回油箱,从而使推板油缸减速加力强压垃圾;接着推板油缸进入收回程序:电磁溢流阀a的电磁铁DT2和三位四通电磁换向阀a的电磁铁DT5得电,第一液压泵输出的压力油通过单向节流阀a的单向阀进入三位四通电磁换向阀a的压力油口P,从三位四通电磁换向阀a的B口出去,进入推板油缸有杆腔,从而驱动推板油缸收回,拉动推板收回使垃圾进入压缩仓;当压力传感器a数值达到设定的收回到位压力时,电磁溢流阀a的电磁铁DT2和三位四通电磁换向阀a的电磁铁DT5失电,电磁溢流阀a卸荷第一液压泵负载,推板压力油路的残压通过单向节流阀a的节流阀卸荷使压力传感器a数值能真实反映第一液压泵输出的压力油压力值;接着再次启动上述压缩循环程序,重复数次,直至把上料的垃圾都压缩入垃圾箱中;第二液压泵输出的压力油通过单向节流阀b的单向阀进入三位四通电磁换向阀b的压力油口P,从三位四通电磁换向阀b的A口出去,进入料斗油缸无杆腔,从而驱动料斗油缸伸出,推动料斗举升上料垃圾;当料斗上升到位,停止料斗上料动作,电磁溢流阀b和三位四通电磁换向阀b的电磁铁DT3和DT7失电,电磁溢流阀b卸荷第二液压泵负载,料斗压力油路的残压通过单向节流阀b的节流阀卸荷使压力传感器b数值能真实反映第二液压泵输出的压力油压力值;
②、在进行推板压缩循环动作同时料斗做下降动作,电磁溢流阀b和三位四通电磁换向阀b的电磁铁DT3和DT8得电,第二液压泵输出的压力油通过单向节流阀b的单向阀进入三位四通电磁换向阀b的压力油口P,从三位四通电磁换向阀b的B口出去,进入料斗油缸有杆腔,从而驱动料斗油缸收回,推动料斗下降,当料斗下降到位,停止料斗下降动作,电磁溢流阀b和三位四通电磁换向阀b的电磁铁DT3和DT8失电,电磁溢流阀b卸荷第二液压泵负载,料斗压力油路的残压通过单向节流阀b的节流阀卸荷使压力传感器b数值能真实反映第二液压泵输出的压力油压力值;
(2)、推板单独动作:启动推板压缩循环动作,电磁溢流阀a、电磁溢流阀b、三位四通电磁换向阀a、差动阀和合流阀的电磁铁DT2、DT3、DT4、DT6、DT9得电,第一液压泵输出的压力油通过单向节流阀a的单向阀进入三位四通电磁换向阀a的压力油口P,第二液压泵输出的压力油通过单向节流阀b的单向阀和合流阀后进入三位四通电磁换向阀a的压力油口P,压力油从三位四通电磁换向阀a的A口出去,进入推板油缸无杆腔,从而驱动推板油缸伸出,推动推板推出压缩垃圾,推板油缸有杆腔出来的液压油通过差动阀,从差动阀P口出来后也进入推板油缸无杆腔,从而加速驱动推板油缸伸出;当压力传感器a数值达到设定的差动切换压力值2时,差动阀的电磁铁DT6失电,推板油缸有杆腔出来的液压油通过差动阀,从差动阀T口出来后进入三位四通电磁换向阀a的B口,再从三位四通电磁换向阀a的T口出来流回油箱,从而使推板油缸减速加力压缩垃圾;当压力传感器a数值达到设定的第二液压泵卸荷压力值1时,电磁溢流阀b和合流阀的电磁铁DT3和DT9失电,从而使推板油缸减速强力压缩垃圾;接着推板油缸进入收回程序:电磁溢流阀a、电磁溢流阀b、三位四通电磁换向阀a、合流阀的电磁铁DT2、DT3、DT5、DT9得电,第一液压泵输出的压力油通过单向节流阀a的单向阀进入三位四通电磁换向阀a的压力油口P,第二液压泵输出的压力油通过单向节流阀b的单向阀和合流阀后进入三位四通电磁换向阀a的压力油口P,压力油从三位四通电磁换向阀a的B口出去,进入推板油缸有杆腔,从而驱动推板油缸收回,拉动推板收回使垃圾进入压缩仓;当压力传感器a数值达到设定的收回到位压力时,电磁溢流阀a、电磁溢流阀b、三位四通电磁换向阀a、合流阀的电磁铁DT2、DT3、DT5、DT9失电,电磁溢流阀a和电磁溢流阀b卸荷第一液压泵和第二液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a和单向节流阀b的节流阀卸荷使压力传感器a和压力传感器b数值能真实反映第一液压泵和第二液压泵输出的压力油压力值;接着再次启动上述压缩循环程序,重复数次,直至把上料的垃圾都压缩入垃圾箱中;
(3)、当第一液压泵或电磁溢流阀a出现故障时,限制推板和料斗同时动作:启动推板压缩循环动作,电磁溢流阀b、三位四通电磁换向阀a、差动阀和合流阀的电磁铁DT3、DT4、DT6、DT9得电,第二液压泵输出的压力油通过单向节流阀b的单向阀和合流阀后进入三位四通电磁换向阀a的压力油口P,压力油从三位四通电磁换向阀a的A口出去,进入推板油缸无杆腔,从而驱动推板油缸伸出,推动推板推出压缩垃圾,推板油缸有杆腔出来的液压油通过差动阀,从差动阀P口出来后也进入推板油缸无杆腔,从而加速驱动推板油缸伸出;当压力传感器a数值达到设定的差动切换压力值1时,差动阀的电磁铁DT6失电,推板油缸有杆腔出来的液压油通过差动阀,从差动阀T口出来后进入三位四通电磁换向阀a的B口,再从三位四通电磁换向阀a的T口出来流回油箱,从而使推板油缸减速加力压缩垃圾;接着进入推板油缸收回程序:电磁溢流阀b、三位四通电磁换向阀a、合流阀的电磁铁DT3、DT5、DT9得电,第二液压泵输出的压力油通过单向节流阀b的单向阀和合流阀后进入三位四通电磁换向阀a的压力油口P,压力油从三位四通电磁换向阀a的B口出去,进入推板油缸有杆腔,从而驱动推板油缸收回,拉动推板收回使垃圾进入压缩仓;当压力传感器a数值达到设定的收回到位压力时,电磁溢流阀b、三位四通电磁换向阀a、合流阀的电磁铁DT3、DT5、DT9失电,电磁溢流阀b卸荷第二液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a和单向节流阀b的节流阀卸荷使压力传感器a和压力传感器b数值能真实反映第一液压泵和第二液压泵输出的压力油压力值;接着再次启动上述压缩循环程序,重复数次,直至把上料的垃圾都压缩入垃圾箱中;
料斗的动作按照(1)推板和料斗同时动作中的料斗的上料和下降的程序动作;
(4)、当第二液压泵或电磁溢流阀b出现故障时,限制推板和料斗同时动作:
①、启动料斗上升动作,电磁溢流阀a、三位四通电磁换向阀b、合流阀的电磁铁DT2、DT7、DT9得电,第一液压泵输出的压力油通过单向节流阀a的单向阀和合流阀进入三位四通电磁换向阀b的压力油口P,从三位四通电磁换向阀b的A口出去,进入料斗油缸无杆腔,从而驱动料斗油缸伸出,推动料斗上升上料,当料斗上升到位,停止料斗上升动作,电磁溢流阀a、三位四通电磁换向阀b、合流阀的电磁铁DT2、DT7、DT9失电,电磁溢流阀a卸荷第一液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a和单向节流阀b的节流阀卸荷使压力传感器a和压力传感器b数值能真实反映第一液压泵和第二液压泵输出的压力油压力值;
②、启动料斗下降动作,电磁溢流阀a、三位四通电磁换向阀b、合流阀的电磁铁DT2、DT8、DT9得电,第一液压泵输出的压力油通过单向节流阀a的单向阀和合流阀进入三位四通电磁换向阀b的压力油口P,从三位四通电磁换向阀b的B口出去,进入料斗油缸有杆腔,从而驱动料斗油缸收回,推动料斗下降,当料斗下降到位,停止料斗下降动作,电磁溢流阀a、三位四通电磁换向阀b、合流阀的电磁铁DT2、DT8、DT9失电,电磁溢流阀a卸荷第一液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a和单向节流阀b的节流阀卸荷使压力传感器a和压力传感器b数值能真实反映第一液压泵和第二液压泵输出的压力油压力值;
推板压缩循环动作按照(1)推板和料斗同时动作中的推板压缩循环的程序动作。
进一步的,在(1)、推板和料斗同时动作,且①、启动推板压缩循环和料斗上料动作的程序中,推板油缸减速加力强压垃圾后,当压力传感器a数值达到设定的推出到位压力时,电磁溢流阀a的电磁铁DT2和三位四通电磁换向阀a的电磁铁DT4失电,电磁溢流阀a卸荷第一液压泵负载,推板压力油路的残压通过单向节流阀a的节流阀卸荷使压力传感器a数值能真实反映第一液压泵输出的压力油压力值,同时三位四通电磁换向阀a封闭推板油缸无杆腔和有杆腔,保压压缩垃圾至预定时间后,接着推板油缸进入收回程序。
进一步的,在(1)、推板和料斗同时动作,,当压力传感器a与压力传感器b的数值合数高于设定值1时,暂停前述的推板油缸动作程序;当压力传感器a与压力传感器b的数值合数低于设定值2时,继续之前的推板油缸动作程序。
进一步的,在(2)、推板单独动作的程序中,推板油缸减速强力压缩垃圾后,当压力传感器a数值达到设定的推出到位压力时,电磁溢流阀a的电磁铁DT2和三位四通电磁换向阀a的电磁铁DT4失电,电磁溢流阀a卸荷第一液压泵负载,推板压力油路的残压通过单向节流阀a的节流阀卸荷使压力传感器a数值能真实反映第一液压泵输出的压力油压力值;同时三位四通电磁换向阀a封闭推板油缸无杆腔和有杆腔,保压压缩垃圾至预定时间,接着推板油缸进入收回程序。
进一步的,在(3)、当第一液压泵或电磁溢流阀a出现故障时,限制推板和料斗同时动作的程序中,推板油缸减速加力压缩垃圾后,当压力传感器a数值达到设定的推出到位压力时,电磁溢流阀b的电磁铁DT3和三位四通电磁换向阀a的电磁铁DT4失电,电磁溢流阀b卸荷第二液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a和单向节流阀b的节流阀卸荷使压力传感器a和压力传感器b数值能真实反映第一液压泵和第二液压泵输出的压力油压力值;同时三位四通电磁换向阀a封闭推板油缸无杆腔和有杆腔,保压压缩垃圾至预定时间后,接着推板油缸进入收回程序。
本发明具有以下有益技术效果:1、极大提高了工作效率;2、实现了当其中一个压力油源故障,设备还能继续工作,使垃圾能及时清运走。
附图说明
以下结合附图和具体实施方式对本发明做进一步详细说明:
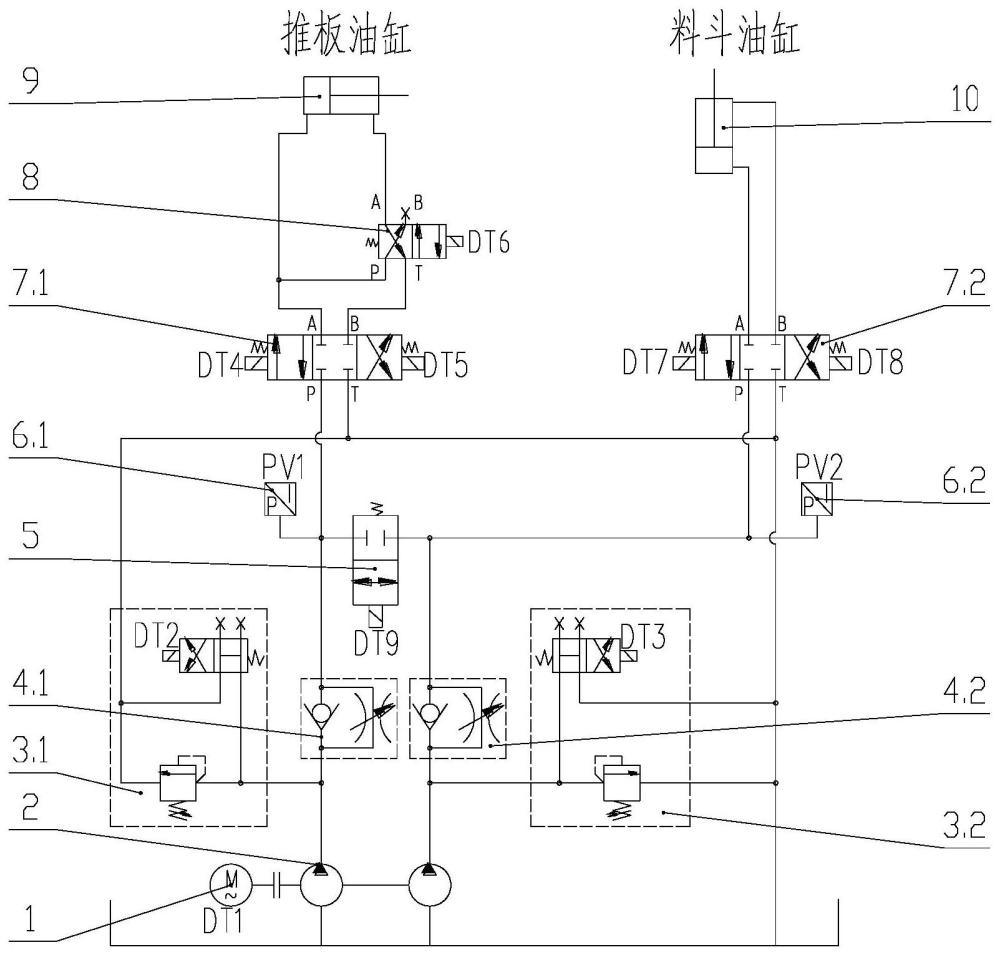
图1为整体箱推板与料斗复合动作的液压系统的示意图。
实施方式
如图1所示,本发明整体箱推板与料斗复合动作的控制方法,该控制方法所基于的液压系统包括液压双联泵2、三位四通电磁换向阀a7.1、差动阀8、推板油缸9、三位四通电磁换向阀b7.2、料斗油缸10、电磁溢流阀a3.1和电磁溢流阀b3.2。
液压双联泵2的第一液压泵出口通过管路连接于三位四通电磁换向阀a7.1的压力油口,三位四通电磁换向阀a7.1的回油口通过管路接回油箱,三位四通电磁换向阀a7.1的A口通过管路连接到推板油缸9的无杆腔,三位四通电磁换向阀a7.1的B口通过管路连接到差动阀8的T口。差动阀8的A口通过管路连接到推板油缸9的有杆腔,差动阀8的P口通过管路并接到三位四通电磁换向阀a7.1的A口与推板油缸9无杆腔之间的油路上。在第一液压泵和三位四通电磁换向阀a7.1压力油口之间装有单向节流阀a4.1,在单向节流阀a4.1和三位四通电磁换向阀a7.1之间的推板压力油路上并接有压力传感器a6.1,在第一液压泵和单向节流阀a4.1之间的油路上并接有油路接于电磁溢流阀a3.1的进油口,电磁溢流阀a3.1的回油口通过管路接回油箱。液压双联泵2的第二液压泵出口通过管路连接于三位四通电磁换向阀b7.2的压力油口,三位四通电磁换向阀b7.2的回油口通过管路接回油箱,三位四通电磁换向阀b7.2的A口和B口通过管路分别接于料斗油缸10的无杆腔和有杆腔。在第二液压泵和三位四通电磁换向阀b7.2压力油口之间装有单向节流阀b4.2,在单向节流阀b4.2和三位四通电磁换向阀b7.2之间的料斗压力油路上并接有压力传感器b6.2,在第二液压泵和单向节流阀b4.2之间的油路上并接有油路接于电磁溢流阀b3.2的进油口,电磁溢流阀b3.2的回油口通过管路接回油箱。在推板压力油路和料斗压力油路之间并接有合流阀5。
本发明的控制方法具体为:
(1)、推板和料斗同时动作:
①、启动推板压缩循环和料斗上料动作,电磁溢流阀a3.1、电磁溢流阀b3.2、三位四通电磁换向阀a7.1、三位四通电磁换向阀b7.2和差动阀8的电磁铁DT2、DT3、DT4、DT6、DT7得电,第一液压泵输出的压力油通过单向节流阀a4.1的单向阀进入三位四通电磁换向阀a7.1的压力油口P,从三位四通电磁换向阀a7.1的A口出去,进入推板油缸9无杆腔,从而驱动推板油缸9伸出,推动推板推出压缩垃圾,推板油缸9有杆腔出来的液压油通过差动阀8,从差动阀P口出来后也进入推板油缸9无杆腔,从而加速驱动推板油缸伸出。当压力传感器a6.1数值达到设定的差动切换压力值1时,差动阀8的电磁铁DT6失电(并在此次推出过程中不再得电),推板油缸9有杆腔出来的液压油通过差动阀8,从差动阀T口出来后进入三位四通电磁换向阀a7.1的B口,再从三位四通电磁换向阀a7.1的T口出来流回油箱,从而使推板油缸减速加力强压垃圾。当压力传感器a6.1数值达到设定的推出到位压力时,电磁溢流阀a3.1的电磁铁DT2和三位四通电磁换向阀a7.1的电磁铁DT4失电,电磁溢流阀a3.1卸荷第一液压泵负载,推板压力油路的残压通过单向节流阀a4.1的节流阀卸荷使压力传感器a6.1数值能真实反映第一液压泵输出的压力油压力值,保证控制程序的稳定可靠;同时三位四通电磁换向阀a7.1封闭推板油缸9无杆腔和有杆腔,保压压缩垃圾至预定时间后,接着推板油缸进入收回程序:电磁溢流阀a3.1的电磁铁DT2和三位四通电磁换向阀a7.1的电磁铁DT5得电,第一液压泵输出的压力油通过单向节流阀a4.1的单向阀进入三位四通电磁换向阀a7.1的压力油口P,从三位四通电磁换向阀a7.1的B口出去,进入推板油缸9有杆腔,从而驱动推板油缸9收回,拉动推板收回使垃圾进入压缩仓。当压力传感器a6.1数值达到设定的收回到位压力时,电磁溢流阀a3.1的电磁铁DT2和三位四通电磁换向阀a7.1的电磁铁DT5失电,电磁溢流阀a3.1卸荷第一液压泵负载,推板压力油路的残压通过单向节流阀a4.1的节流阀卸荷使压力传感器a6.1数值能真实反映第一液压泵输出的压力油压力值,保证控制程序的稳定可靠。接着再次启动上述压缩循环程序,重复数次,直至把上料的垃圾都压缩入垃圾箱中。第二液压泵输出的压力油通过单向节流阀b4.2的单向阀进入三位四通电磁换向阀b7.2的压力油口P,从三位四通电磁换向阀b7.2的A口出去,进入料斗油缸10无杆腔,从而驱动料斗油缸10伸出,推动料斗举升上料垃圾。当料斗上升到位,停止料斗上料动作,电磁溢流阀b3.2和三位四通电磁换向阀b7.2的电磁铁DT3和DT7失电,电磁溢流阀b3.2卸荷第二液压泵负载,料斗压力油路的残压通过单向节流阀b4.2的节流阀卸荷使压力传感器b6.2数值能真实反映第二液压泵输出的压力油压力值,保证控制程序的稳定可靠。
②、在进行推板压缩循环动作同时料斗做下降动作,电磁溢流阀b3.2和三位四通电磁换向阀b7.2的电磁铁DT3和DT8得电,第二液压泵输出的压力油通过单向节流阀b4.2的单向阀进入三位四通电磁换向阀b7.2的压力油口P,从三位四通电磁换向阀b7.2的B口出去,进入料斗油缸10有杆腔,从而驱动料斗油缸10收回,推动料斗下降。当料斗下降到位,停止料斗下降动作,电磁溢流阀b3.2和三位四通电磁换向阀b7.2的电磁铁DT3和DT8失电,电磁溢流阀b3.2卸荷第二液压泵负载,料斗压力油路的残压通过单向节流阀b4.2的节流阀卸荷使压力传感器b6.2数值能真实反映第二液压泵输出的压力油压力值,保证控制程序的稳定可靠。
当压力传感器a6.1与压力传感器b6.2的数值合数高于设定值1时,暂停前述的推板油缸9动作程序,以保证电机不过载及料斗动作顺畅,当压力传感器a6.1与压力传感器b6.2的数值合数低于设定值2时,继续之前的推板油缸9动作程序。
(2)、推板单独动作:启动推板压缩循环动作,电磁溢流阀a3.1、电磁溢流阀b3.2、三位四通电磁换向阀a7.1、差动阀8和合流阀5的电磁铁DT2、DT3、DT4、DT6、DT9得电,第一液压泵输出的压力油通过单向节流阀a4.1的单向阀进入三位四通电磁换向阀a7.1的压力油口P,第二液压泵输出的压力油通过单向节流阀b4.2的单向阀和合流阀5后进入三位四通电磁换向阀a7.1的压力油口P,压力油从三位四通电磁换向阀a7.1的A口出去,进入推板油缸9无杆腔,从而驱动推板油缸9伸出,推动推板推出压缩垃圾,推板油缸9有杆腔出来的液压油通过差动阀8,从差动阀P口出来后也进入推板油缸9无杆腔,从而加速驱动推板油缸9伸出。当压力传感器a6.1数值达到设定的差动切换压力值2时,差动阀8的电磁铁DT6失电(并在此次推出过程中不再得电),推板油缸9有杆腔出来的液压油通过差动阀8,从差动阀T口出来后进入三位四通电磁换向阀a7.1的B口,再从三位四通电磁换向阀a7.1的T口出来流回油箱,从而使推板油缸减速加力压缩垃圾。当压力传感器a6.1数值达到设定的第二液压泵卸荷压力值1时,电磁溢流阀b3.2和合流阀5的电磁铁DT3和DT9失电(电磁溢流阀b3.2卸荷第二液压泵负载,料斗压力油路的残压通过单向节流阀b4.2的节流阀卸荷使压力传感器b6.2数值能真实反映第二液压泵输出的压力油压力值,保证控制程序的稳定可靠),从而使推板油缸减速强力压缩垃圾。当压力传感器a6.1数值达到设定的推出到位压力时,电磁溢流阀a3.1的电磁铁DT2和三位四通电磁换向阀a7.1的电磁铁DT4失电,电磁溢流阀a3.1卸荷第一液压泵负载,推板压力油路的残压通过单向节流阀a4.1的节流阀卸荷使压力传感器a6.1数值能真实反映第一液压泵输出的压力油压力值,保证控制程序的稳定可靠;同时三位四通电磁换向阀a7.1封闭推板油缸9无杆腔和有杆腔,保压压缩垃圾至预定时间后,接着推板油缸进入收回程序:电磁溢流阀a3.1、电磁溢流阀b3.2、三位四通电磁换向阀a7.1、合流阀5的电磁铁DT2、DT3、DT5、DT9得电,第一液压泵输出的压力油通过单向节流阀a4.1的单向阀进入三位四通电磁换向阀a7.1的压力油口P,第二液压泵输出的压力油通过单向节流阀b的单向阀和合流阀5后进入三位四通电磁换向阀a7.1的压力油口P,压力油从三位四通电磁换向阀a7.1的B口出去,进入推板油缸9有杆腔,从而驱动推板油缸9收回,拉动推板收回使垃圾进入压缩仓。当压力传感器a6.1数值达到设定的收回到位压力时,电磁溢流阀a3.1、电磁溢流阀b3.2、三位四通电磁换向阀a7.1、合流阀5的电磁铁DT2、DT3、DT5、DT9失电,电磁溢流阀a3.1和电磁溢流阀b3.2卸荷第一液压泵和第二液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a4.1和单向节流阀b4.2的节流阀卸荷使压力传感器a6.1和压力传感器b6.2数值能真实反映第一液压泵和第二液压泵输出的压力油压力值,保证控制程序的稳定可靠。接着再次启动上述压缩循环程序,重复数次,直至把上料的垃圾都压缩入垃圾箱中。
(3)、当第一液压泵或电磁溢流阀a3.1出现故障时,限制推板和料斗同时动作:启动推板压缩循环动作,电磁溢流阀b3.2、三位四通电磁换向阀a7.1、差动阀8和合流阀5的电磁铁DT3、DT4、DT6、DT9得电,第二液压泵输出的压力油通过单向节流阀b4.2的单向阀和合流阀5后进入三位四通电磁换向阀a7.1的压力油口P,压力油从三位四通电磁换向阀a7.1的A口出去,进入推板油缸9无杆腔,从而驱动推板油缸9伸出,推动推板推出压缩垃圾,推板油缸9有杆腔出来的液压油通过差动阀8,从差动阀P口出来后也进入推板油缸9无杆腔,从而加速驱动推板油缸9伸出。当压力传感器a6.1数值达到设定的差动切换压力值1时,差动阀8的电磁铁DT6失电(并在此次推出过程中不再得电),推板油缸9有杆腔出来的液压油通过差动阀8,从差动阀T口出来后进入三位四通电磁换向阀a7.1的B口,再从三位四通电磁换向阀a7.1的T口出来流回油箱,从而使推板油缸减速加力压缩垃圾。当压力传感器a6.1数值达到设定的推出到位压力时,电磁溢流阀b3.2的电磁铁DT3和三位四通电磁换向阀a7.1的电磁铁DT4失电,电磁溢流阀b3.2卸荷第二液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a4.1和单向节流阀b4.2的节流阀卸荷使压力传感器a6.1和压力传感器b6.2数值能真实反映第一液压泵和第二液压泵输出的压力油压力值,保证控制程序的稳定可靠;同时三位四通电磁换向阀a7.1封闭推板油缸9无杆腔和有杆腔,保压压缩垃圾至预定时间后;接着进入推板油缸收回程序:电磁溢流阀b3.2、三位四通电磁换向阀a7.1、合流阀5的电磁铁DT3、DT5、DT9得电,第二液压泵输出的压力油通过单向节流阀b4.2的单向阀和合流阀5后进入三位四通电磁换向阀a7.1的压力油口P,压力油从三位四通电磁换向阀a7.1的B口出去,进入推板油缸9有杆腔,从而驱动推板油缸9收回,拉动推板收回使垃圾进入压缩仓。当压力传感器a6.1数值达到设定的收回到位压力时,电磁溢流阀b3.2、三位四通电磁换向阀a7.1、合流阀5的电磁铁DT3、DT5、DT9失电,电磁溢流阀b3.2卸荷第二液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a4.1和单向节流阀b4.2的节流阀卸荷使压力传感器a6.1和压力传感器b6.2数值能真实反映第一液压泵和第二液压泵输出的压力油压力值,保证控制程序的稳定可靠。接着再次启动上述压缩循环程序,重复数次,直至把上料的垃圾都压缩入垃圾箱中。
料斗的动作按照(1)推板和料斗同时动作中的料斗的上料和下降的程序动作(料斗做上升动作:电磁溢流阀b3.2、三位四通电磁换向阀a7.1、三位四通电磁换向阀b7.2和差动阀8的电磁铁DT3、DT4、DT6、DT7得电,第二液压泵输出的压力油通过单向节流阀b4.2的单向阀进入三位四通电磁换向阀b7.2的压力油口P,从三位四通电磁换向阀b7.2的A口出去,进入料斗油缸10无杆腔,从而驱动料斗油缸10伸出,推动料斗举升上料垃圾。当料斗上升到位,停止料斗上料动作,电磁溢流阀b3.2和三位四通电磁换向阀b7.2的电磁铁DT3和DT7失电,电磁溢流阀b3.2卸荷第二液压泵负载,料斗压力油路的残压通过单向节流阀b4.2的节流阀卸荷使压力传感器b6.2数值能真实反映第二液压泵输出的压力油压力值,保证控制程序的稳定可靠。
料斗做下降动作:电磁溢流阀b3.2和三位四通电磁换向阀b7.2的电磁铁DT3和DT8得电,第二液压泵输出的压力油通过单向节流阀b4.2的单向阀进入三位四通电磁换向阀b7.2的压力油口P,从三位四通电磁换向阀b7.2的B口出去,进入料斗油缸10有杆腔,从而驱动料斗油缸10收回,推动料斗下降。当料斗下降到位,停止料斗下降动作,电磁溢流阀b3.2和三位四通电磁换向阀b7.2的电磁铁DT3和DT8失电,电磁溢流阀b3.2卸荷第二液压泵负载,料斗压力油路的残压通过单向节流阀b4.2的节流阀卸荷使压力传感器b6.2数值能真实反映第二液压泵输出的压力油压力值,保证控制程序的稳定可靠)。
(4)、当第二液压泵或电磁溢流阀b3.2出现故障时,限制推板和料斗同时动作:
①、启动料斗上升动作,电磁溢流阀a3.1、三位四通电磁换向阀b7.2、合流阀5的电磁铁DT2、DT7、DT9得电,第一液压泵输出的压力油通过单向节流阀a4.1的单向阀和合流阀5进入三位四通电磁换向阀b7.2的压力油口P,从三位四通电磁换向阀b7.2的A口出去,进入料斗油缸10无杆腔,从而驱动料斗油缸10伸出,推动料斗上升上料。当料斗上升到位,停止料斗上升动作,电磁溢流阀a3.1、三位四通电磁换向阀b7.2、合流阀5的电磁铁DT2、DT7、DT9失电,电磁溢流阀a3.1卸荷第一液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a4.1和单向节流阀b4.2的节流阀卸荷使压力传感器a6.1和压力传感器b6.2数值能真实反映第一液压泵和第二液压泵输出的压力油压力值,保证控制程序的稳定可靠。
②、启动料斗下降动作,电磁溢流阀a3.1、三位四通电磁换向阀b7.2、合流阀5的电磁铁DT2、DT8、DT9得电,第一液压泵输出的压力油通过单向节流阀a4.1的单向阀和合流阀5进入三位四通电磁换向阀b7.2的压力油口P,从三位四通电磁换向阀b7.2的B口出去,进入料斗油缸10有杆腔,从而驱动料斗油缸10收回,推动料斗下降。当料斗下降到位,停止料斗下降动作,电磁溢流阀a3.1、三位四通电磁换向阀b7.2、合流阀5的电磁铁DT2、DT8、DT9失电,电磁溢流阀a3.1卸荷第一液压泵负载,推板压力油路和料斗压力油路的残压通过单向节流阀a4.1和单向节流阀b4.2的节流阀卸荷使压力传感器a6.1和压力传感器b6.2数值能真实反映第一液压泵和第二液压泵输出的压力油压力值,保证控制程序的稳定可靠。
推板压缩循环动作按照(1)推板和料斗同时动作中的推板压缩循环的程序动作(电磁溢流阀a3.1、三位四通电磁换向阀a7.1、三位四通电磁换向阀b7.2和差动阀8的电磁铁DT2、DT4、DT6、DT7得电,第一液压泵输出的压力油通过单向节流阀a4.1的单向阀进入三位四通电磁换向阀a7.1的压力油口P,从三位四通电磁换向阀a7.1的A口出去,进入推板油缸9无杆腔,从而驱动推板油缸9伸出,推动推板推出压缩垃圾,推板油缸9有杆腔出来的液压油通过差动阀8,从差动阀P口出来后也进入推板油缸9无杆腔,从而加速驱动推板油缸伸出。当压力传感器a6.1数值达到设定的差动切换压力值1时,差动阀8的电磁铁DT6失电(并在此次推出过程中不再得电),推板油缸9有杆腔出来的液压油通过差动阀8,从差动阀T口出来后进入三位四通电磁换向阀a7.1的B口,再从三位四通电磁换向阀a7.1的T口出来流回油箱,从而使推板油缸减速加力强压垃圾。当压力传感器a6.1数值达到设定的推出到位压力时,电磁溢流阀a3.1的电磁铁DT2和三位四通电磁换向阀a7.1的电磁铁DT4失电,电磁溢流阀a3.1卸荷第一液压泵负载,推板压力油路的残压通过单向节流阀a4.1的节流阀卸荷使压力传感器a6.1数值能真实反映第一液压泵输出的压力油压力值,保证控制程序的稳定可靠;同时三位四通电磁换向阀a7.1封闭推板油缸9无杆腔和有杆腔,保压压缩垃圾。保压预定时间后,电磁溢流阀a3.1的电磁铁DT2和三位四通电磁换向阀a7.1的电磁铁DT5得电,第一液压泵输出的压力油通过单向节流阀a4.1的单向阀进入三位四通电磁换向阀a7.1的压力油口P,从三位四通电磁换向阀a7.1的B口出去,进入推板油缸9有杆腔,从而驱动推板油缸9收回,拉动推板收回使垃圾进入压缩仓。当压力传感器a6.1数值达到设定的收回到位压力时,电磁溢流阀a3.1的电磁铁DT2和三位四通电磁换向阀a7.1的电磁铁DT5失电,电磁溢流阀a3.1卸荷第一液压泵负载,推板压力油路的残压通过单向节流阀a4.1的节流阀卸荷使压力传感器a6.1数值能真实反映第一液压泵输出的压力油压力值,保证控制程序的稳定可靠)。
以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本领域的技术人员在不背离本发明的原理和实质的前提下,可以对此实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。