一种用于化工管道检测的爬行机器人
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及仿生机器人在化工应用的技术领域,尤其涉及一种用于化工管道检测的爬行机器人。
背景技术
在化工产业中,管道系统是极其重要的组成部分,负责将原料、中间产品和成品在工厂内部进行传输。然而,管道系统常常处于恶劣环境中并且结构复杂,导致其维护和检测变得极具挑战性。传统的管道检测方式,如视觉检查、压力测试和超声检测等,虽然能够完成基本任务,但在处理复杂环境和难以接触的区域时效率低下,准确性有限。
发明内容
有鉴于此,本发明要解决的技术问题在于提供一种用于化工管道检测的爬行机器人,以解决传统化工管道的检测方式处理复杂环境和难以接触的管道区域时效率低下、准确性有限的技术问题。
本发明提供了一种用于化工管道检测的爬行机器人,其包括:
毛虫组件,其包括一节或多节通过弓形固定装置依次连接的毛虫节、以及穿设于所述毛虫节和所述弓形固定装置的拉伸线;所述毛虫节包括多个依次连接的毛虫夹爪和用于所述毛虫夹爪之间连接的身体部分,通过所述拉伸线控制所述身体部分的收缩或舒展以配合所述毛虫夹爪的张开或闭合,进而驱动所述毛虫组件在管道外的爬行移动;
象鼻组件,其通过连接转向机构与所述毛虫组件连接并通过所述毛虫组件驱动移动,所述象鼻组件包括一节或多节通过连接螺栓依次连接的象鼻节、以及设置在其与所述毛虫组件的连接端相对的另一端的象鼻夹爪;所述象鼻节包括多个依次连接的弹性件、用于所述弹性件之间连接的间隔盘、以及连接在所述间隔盘之间的多个气动肌肉,通过控制所述气动肌肉的收缩或伸展,进而实现所述象鼻组件的偏转、弯曲和缩放动作;
摄像设备,其设置在所述象鼻夹爪上,用于对化工管道进行检测和维护时进行实时监控。
可选地,所述象鼻组件还包括用于包裹所述气动肌肉的气管,通过所述气管的输气和放气实现所述气动肌肉收缩或伸展。
可选地,所述象鼻夹爪包括象鼻夹爪动力源、以及与所述象鼻夹爪动力源连接的夹爪部。
可选地,所述象鼻组件的两端分别设置有第一固定盘和第二固定盘,所述象鼻组件通过所述第一固定盘与所述连接转向机构连接,所述象鼻组件通过所述第二固定盘和所述象鼻夹爪连接。
可选地,所述毛虫夹爪包括毛虫夹爪动力源、与所述毛虫夹爪动力源连接的多个连杆,多个所述连杆构成夹爪形状。
可选地,所述连接转向机构包括分别相对设置的两个连接柄和两个挂钩,两个所述挂钩设置在两个所述连接柄之间,两个挂钩之间通过拉销连接,所述挂钩和所述连接柄通过销轴连接;所述两个连接柄分别连接所述毛虫组件和所述象鼻组件。
可选地,所述间隔盘和所述连接转向机构采用复合材料,以使得所述爬行机器人关节部分轻量化。
可选地,所述爬行机器人除了所述连接转向机构和所述间隔盘外的其他部件均采用防腐防爆材料。
可选地,所述爬行机器人还包括设置在所述象鼻夹爪上的点光源,用于检测化工管道外部的环境和状态时提供照明。
可选地,所述弹性件为弹簧。
与现有技术相比,本发明提供了一种用于化工管道检测的爬行机器人,其包括毛虫组件、象鼻组件以及设置在所述象鼻组件的摄像设备,所述毛虫组件和所述象鼻组件通过连接转向机构连接。所述毛虫组件包括一节或多节通过弓形固定装置依次连接的毛虫节、以及穿设于所述毛虫节和所述弓形固定装置的拉伸线;所述毛虫节包括多个依次连接的毛虫夹爪和用于所述毛虫夹爪之间连接的身体部分,通过所述拉伸线控制所述身体部分的收缩或舒展以配合所述毛虫夹爪的张开或闭合,进而驱动所述爬行机器人在管道外的爬行移动;所述象鼻组件,其通过连接转向机构与所述毛虫组件连接并通过所述毛虫组件驱动移动,所述象鼻组件包括一节或多节通过连接螺栓依次连接的象鼻节、以及设置在其与所述毛虫组件的连接端相对的另一端的象鼻夹爪;所述象鼻节包括多个依次连接的弹性件、用于所述弹性件之间连接的间隔盘、以及连接在所述间隔盘之间的多个气动肌肉,通过控制所述气动肌肉的收缩或伸展,进而实现所述象鼻组件的偏转、弯曲和缩放动作;所述摄像设备用于对化工管道进行检测和维护时进行实时监控。通过所述毛虫组件驱动行进和所述象鼻组件实现偏转等动作,使得所述爬行机器人高度适应复杂的化工管道环境,可在复杂的化工管道环境下进行灵活的转向或前往其他管道外部,显著提高了化工管道检测的效率和准确性,具有显著的应用前景,为化工管道检测工作带来革命性的变革。
附图说明
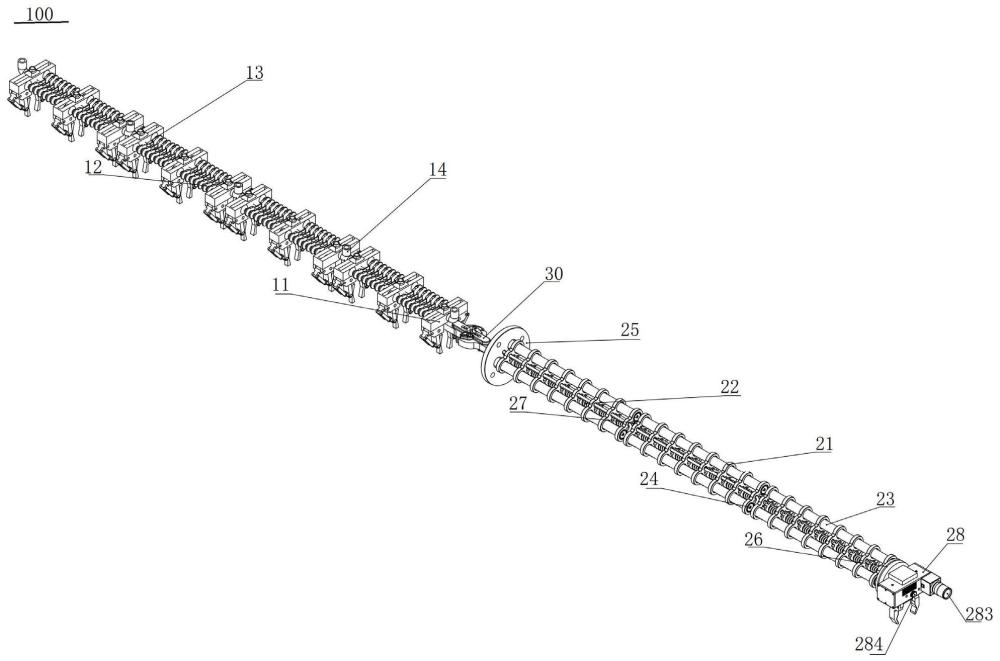
图1是本发明提供的爬行机器人的整体结构示意图。
图2是本发明提供的爬行机器人的毛虫组件的结构示意图。
图3是本发明提供的爬行机器人的毛虫夹爪的结构示意图。
图4是本发明提供的爬行机器人的象鼻组件的结构示意图。
图5是本发明提供的爬行机器人的象鼻夹爪的结构示意图。
图6是本发明提供的爬行机器人的连接转向机构的结构示意图。
附图标记说明如下:
100、爬行机器人;10、毛虫组件;11、毛虫夹爪;111、毛虫夹爪动力源;112、连杆;113、螺钉;12、身体部分;13、拉伸线;14、弓形固定装置;20、象鼻组件;21、间隔盘;22、弹性件;23、气动肌肉;24、气管;25、第一固定盘;26、第二固定盘;27、连接螺栓;28、象鼻夹爪;281、象鼻夹爪动力源;282、夹爪部;283、摄像设备;284、点光源;30、连接转向机构;301、连接柄;302、挂钩;303、拉销;304、销轴。
具体实施方式
体现本发明特征与优点的典型实施方式将在以下的说明中详细叙述。应理解的是本发明能够在不同的实施方式上具有各种的变化,其皆不脱离本发明的范围,且其中的说明及图示在本质上是当作说明之用,而非用以限制本发明。
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本申请的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
为了进一步说明本发明的原理和结构,现结合附图对本发明的优选实施例进行详细说明。
请参阅图1、图2和图3,本申请提供了一种用于化工管道检测的爬行机器人100,以应用于复杂的化工管道环境,尤其适合化工管道的检测工作,所述爬行机器人100模仿象鼻和毛虫的结构和功能特效,提高了对化工管道检测的效率和准确率。所述爬行机器人100包括毛虫组件10、象鼻组件20和摄像设备283,所述毛虫组件10和所述象鼻组件20通过连接转向机构30连接,所述摄像设备设置在所述象鼻组件20上。
请参阅图2,所述毛虫组件10包括一节或多节通过弓形固定装置14依次连接的毛虫节、以及穿设于所述毛虫节和所述弓形装置的拉伸线13。其中,所述毛虫节包括多个依次连接的毛虫夹爪11和用于所述毛虫夹爪11之间连接的身体部分12。
具体地在本实施例中,所述毛虫组件10包括多节依次连接的所述毛虫节,所述毛虫节之间通过所述弓形固定装置14连接;每个所述毛虫节包括多个依次连接的所述毛虫夹爪11,所述毛虫夹爪11之间通过所述身体部分12连接,所述拉伸线13依次从连接所述毛虫节的所述弓形固定装置14和所述毛虫身体部分12穿过,所述身体部分12通过所述拉伸线13实现可调节地收缩或舒展以配合所述毛虫夹爪11的张开或闭合,进而驱动所述毛虫组件10的爬行移动,以实现所述毛虫部分的精确控制。可以理解地是,所述毛虫夹爪11的数量可以根据实际应用例如管道的大小和弯度进行调整。
在其他的一些实施例中,所述毛虫组件10还可以为一节毛虫节,所述拉伸线13依次穿过连接所述毛虫夹爪11的所述身体部分12,根据实际需要还可以通过调节所述毛虫夹爪11数量来调整所述毛虫组件10的长度。
进一步地,请参阅图3,所述毛虫夹爪11包括毛虫夹爪动力源111、与所述毛虫夹爪动力源111连接的多个连杆112,多个连杆112通过螺钉113固定连接构成夹爪形状,所述毛虫夹爪11通过所述毛虫夹爪动力源111控制所述连杆112的转动进而实现所述毛虫夹爪11的力度可调节。
请参阅图4,所述象鼻组件20包括一节或多节通过连接螺栓27依次连接的象鼻节、以及设置在其与所述毛虫组件10的连接端相对的另一端的象鼻夹爪28;所述象鼻节包括多个依次连接的弹性件22、用于所述弹性件22之间连接的间隔盘21、以及连接在所述间隔盘21之间的多个气动肌肉23。
进一步地,所述象鼻组件20还包括用于包裹所述气动肌肉23的气管24,通过所述气管24的输气和放气实现所述气动肌肉23的收缩或伸展。
具体地在本实施例中,所述象鼻组件20包括多个依次连接的所述象鼻节,所述象鼻节之间通过所述连接螺栓27连接;每个所述象鼻节包括多个依次连接的所述弹性件22,所述弹性件22为弹簧,所述弹簧之间通过所述间隔盘21连接,所述气动肌肉23连接于所述间隔盘21之间,即两个所述间隔盘21之间均连接有所述弹簧和所述气动肌肉23,所述气动肌肉23由所述气管24包裹,通过所述气动肌肉23的收缩和所述象鼻夹爪28的工作,实现所述爬行机器人100在化工管道外部的偏转、弯曲、收缩等精准操作,以适应化工管道外部的复杂环境。请参阅图5,所述象鼻夹爪28包括包括象鼻夹爪动力源282、以及与所述象鼻夹爪动力源281连接的夹爪部282,所述象鼻夹爪动力源281控制所述象鼻夹爪28实现所述象鼻夹爪28的可调节力度,以适应不同的工作条件。
优选地,所述间隔盘21采用创新的复合材料,能够减轻所述爬行机器人100的质量,实现所述爬行机器人100的轻量化,并使其在复杂的化工管道环境中,能有效耐受化学物质腐蚀和增强高温耐受性,保持优秀的强度和耐用性。
所述摄像设备283设置在所述象鼻夹爪28上,进一步地,在本实施例中,所述摄像设备28为摄像头,所述象鼻组件20还包括分别设置于其两端的第一固定盘25和第二固定盘26、以及点光源284。其中,所述象鼻组件20通过所述第一固定盘25与所述连接转向机构30连接,所述象鼻组件20通过所述第二固定盘26和所述象鼻夹爪28连接;设置在所述象鼻夹爪28的所述点光源284提供为所述爬行机器人100的检测工作提供照明,所述摄像头通过所述象鼻组件20进行的弯曲、旋转、伸缩等动作可以调整方向,以方便实时监控和检测管道外部的环境和状态。
通过所述摄像设备283和所述毛虫夹爪11及所述象鼻夹爪28的结合,所述爬行机器人100可以在化工管道外部进行实时视觉检查和障碍物的精确抓取操作,大大提高了化工管道检测的效率。由于化工管道的特殊性,部分管道无法人工检测,通过所述爬行机器人100能够到达人工难以接近的化工管道区域,提高了检测的准确性。
可以理解地是,根据应用的不同,所述象鼻夹爪28上还可以安装其他检测设备。
请参阅图6,所述连接转向机构30包括分别相对设置的两个连接柄301和两个挂钩302,两个所述挂钩302设置在两个所述连接柄301之间,两个所述挂钩302之间通过拉销303连接,所述挂钩302和所述连接柄301通过销轴304连接;所述两个连接柄301分别连接所述毛虫组件10和所述象鼻组件20。具体地在本实施例中,所述连接柄301通过所述第一固定盘25与所述象鼻组件20连接。优选地,所述连接转向机构30采用创新的复合材料,可实现所述爬行机器人100的轻量化,同时保持优秀的强度和耐用性。
具体地在本实施例中,所述爬行机器人100的所述间隔盘21和所述连接转向机构30均采用碳纤维-ABS创新的复合材料,所述复合材料轻质且强度高,而所述爬行机器人100除了所述连接转向机构30和所述间隔盘21外的其他部件均采用防腐防爆材料,使得所述爬行机器人100用于化工管道的检测和维护能抵抗腐蚀和高温,并保持轻量化的特性从而维持持久的性能,保证了其在复杂的化工环境中的稳定性和耐用性。
所述爬行机器人100的工作原理:
当需要对化工管道进行检测时,所述爬行机器人100的所述毛虫组件10通过所述拉伸线13的作用,控制所述身体部分12的收缩或舒展,所述身体部分12配合所述毛虫夹爪11的张开或闭合,有效地利用弹性势能驱动整个所述爬行机器人100在管道环境中进行爬行移动;当需要转向或向其他管道外部移动时,所述象鼻部分的所述气动肌肉23通过所述气管24的输气和放气来控制气动肌肉23的收缩或伸展,进而实现整个所述象鼻部分的偏转、弯曲、收缩等动作;通过所述象鼻组分的偏转、弯曲、收缩等动作可以调整方向,设置在所述象鼻组件20的摄像头可以进行实时监控和检测。同时,所述毛虫夹爪11、所述象鼻夹爪28可以调节力度,以适应不同的工作条件;所述爬行机器人100的所述间隔盘21和所述连接转向机构30使用了轻量且强度高的复合材料,可以有效降低所述爬行机器人100的重量并增强其耐化学物质腐蚀和高温的能力;整个所述爬行机器人100除了所述间隔盘21和所述连接转向机构30外,所有其他部分都采用防腐、防爆材料制造,以适应化工管道的特殊环境。通过所述毛虫组件10驱动行进、所述象鼻组件20实现偏转等动作以及采用轻量化和防腐防爆材料,使得所述爬行机器人100高度适应复杂的管道环境,能够在当前应用场景的管道环境下进行灵活的转向或前往其他管道外部。
本发明提供了一种用于化工管道检测的爬行机器人100,其包括毛虫组件10、象鼻组件20以及设置在所述象鼻组件的摄像设备283,所述毛虫组件10和所述象鼻组件20通过连接转向机构30连接。所述毛虫组件10包括一节或多节通过弓形固定装置14依次连接的毛虫节、以及穿设于所述毛虫节和所述弓形固定装置14的拉伸线13;所述毛虫节包括多个依次连接的毛虫夹爪11和用于所述毛虫夹爪11之间连接的身体部分12,通过所述拉伸线13控制所述身体部分12的收缩或舒展以配合所述毛虫夹爪11的张开或闭合,进而驱动所述爬行机器人100在管道外的爬行移动;所述象鼻组件20,其通过连接转向机构30与所述毛虫组件10连接并通过所述毛虫组件10驱动移动,所述象鼻组件20包括一节或多节通过连接螺栓27依次连接的象鼻节、以及设置在其与所述毛虫组件10的连接端相对的另一端的象鼻夹爪28;所述象鼻节包括多个依次连接的弹性件22、用于所述弹性件22之间连接的间隔盘21、以及连接在所述间隔盘21之间的多个气动肌肉23,通过控制所述气动肌肉23的收缩或伸展,进而实现所述象鼻组件20的偏转、弯曲和缩放动作。本发明通过模仿自然界生物的象鼻和毛虫,所述毛虫组件10驱动行进和所述象鼻组件20实现偏转等动作,使得所述爬行机器人100在复杂的化工管道环境下也能拥有非常高的灵活性和适应性;通过气动肌肉23的收缩和象鼻夹爪28的工作,能够实现在管道外部的偏转、弯曲、收缩等精准操作,使得所述爬行机器人100高度适应化工管道环境,可在复杂的管道环境下进行灵活的转向或前往其他管道外部。通过所述摄像头和所述毛虫夹爪11、所述象鼻夹爪28的配合,所述爬行机器人100可以在管道外部进行实时视觉检查和障碍物的精确抓取操作,大大提高了管道检测的效率。且所述爬行机器人100可以进行长时间的连续工作,而且能够到达人工难以接近的地方,提高了检测的准确性,特别适用于化工管道的检测。由于所述爬行机器人100能够在管道外部进行详细和准确的检测,因此能够预防和减少管道故障的发生,从而降低化工生产过程中的维护成本。
以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。