全自动平面轴承合套及组件高度测量一体机
文献发布时间:2023-06-19 09:24:30
技术领域:
本发明涉及零件自动装配技术领域,尤其涉及一种全自动平面轴承合套及组件高度测量一体机。
背景技术:
平面轴承通常由带滚针或圆柱滚子或钢球的平面轴承组件和推力片组成,该类轴承在很小的空间下可获得很高的轴向载荷和高的刚度。平面轴承生产、装配的最后一道环节通常为将带圆柱滚子的平面轴承组件压装到推力片中,然后铆紧,该工序称之为合套,为了判断合套是否到位,通常需要测量成品在各个角度的高度。
现有技术中,通常使用手工合套、测量,没有设备支持,依赖于操作人员,不确定因素多,成品稳定性差,合套和测量的效率低,且精度低。
发明内容:
针对上述问题,本发明提出了一种自动化程度高、合套和测量效率高且精度高的全自动平面轴承合套及组件高度测量一体机。
本发明是通过如下技术方案实现的:
一种全自动平面轴承合套及组件高度测量一体机,包括电箱控制装置、台架以及设置在所述台架中的平面轴承进料部、平面轴承上下料机械手、推力片料仓、推力片上料机械手、平面轴承合套部、平移机械手、平面轴承组件高度测量部和NG排料部。
所述平面轴承进料部用于传送、分隔待合套的平面轴承,包括输送机构、隔料组件、第一有料感应开关、侧边挡板和定位块,所述输送机构包括传送带和传送带驱动装置,所述侧边挡板设置在所述传送带两侧,用于限制待合套平面轴承的传送路径,所述第一有料感应开关和所述定位块设置在所述传动带输出端,所述隔料组件设置在一侧的侧边挡板上,用于阻挡或放行所述传送带上待合套的平面轴承。
为了便于准确定位待合套的平面轴承,方便机械手精准抓取,所述定位块呈V型且开口朝向所述传送带输入端。
为了在实现其功能的前提下尽可能简化结构,作为优选,所述隔料组件包括隔料块和隔料块驱动机构,所述隔料块驱动机构可驱动所述隔料块伸缩以阻挡或放行所述传送带上待合套的平面轴承。
所述平面轴承上下料机械手用于抓取待合套的平面轴承至合套工位以及将合套后的平面轴承成品抓取至高度检测工位,包括轴承夹爪横向导轨组件、轴承夹爪纵向导轨组件、轴承夹爪连接板支架、轴承夹爪组件,所述轴承夹爪组件用于抓取待合套的平面轴承,所述轴承夹爪组件通过所述轴承夹爪连接板支架连接于所述轴承夹爪纵向导轨组件上,并可随所述轴承夹爪纵向导轨组件上下移动,所述轴承夹爪纵向导轨组件连接于所述轴承夹爪横向导轨组件上并可沿所述轴承夹爪横向导轨组件左右移动,从而带动所述轴承夹爪组件沿所述轴承夹爪横向导轨组件左右移动。
轴承夹爪组件包括轴承夹爪气缸,由于合套工艺需要,轴承夹爪气缸在抓取待合套平面轴承时呈水平状态,将待合套平面轴承放入相配合的推力片时需倾斜放置,故轴承夹爪气缸需在水平和倾斜两种状态自由、快捷地切换,为实现这一功能,所述轴承夹爪组件还包括转轴、角度复位气缸组件、水平调节螺杆和角度倾斜大小调节螺杆,所述轴承夹爪气缸通过所述转轴连接于所述轴承夹爪连接板支架下端并可绕所述转轴转动,所述角度复位气缸组件连接于所述轴承夹爪连接板支架上平面,所述角度复位气缸组件包括角度复位气缸和顶杆,所述轴承夹爪连接板支架上对应于所述转轴两侧分别开设有顶杆孔和水平调节螺杆孔,所述角度复位气缸可驱动所述顶杆在所述顶杆孔中伸缩以带动所述轴承夹爪气缸绕所述转轴转动,所述水平调节螺杆设置在所述水平调节螺杆孔上平面并可在所述水平调节螺杆孔内旋进旋出,所述水平调节螺杆上套设有第一弹簧,配合所述角度复位气缸使用可使得轴承夹爪气缸转动至水平位置,所述轴承夹爪气缸上平面开设有角度大小调节螺杆孔,所述角度倾斜大小调节螺杆设置于所述角度大小调节螺杆孔下平面并可在所述角度大小调节螺杆孔内旋进旋出,以根据实际需要调节轴承夹爪气缸在倾斜状态时的倾斜角度。
所述推力片料仓用于存放和提供推力片,为了便于机械手抓取推力片,所述推力片料仓包括底座、设置在所述底座上的分割器、料盘以及设置在所述料盘上的提升驱动组件和若干料杆组件,所述料杆组件用于套设、堆放推力片,包括导向料杆和承料台,所述提升驱动组件可驱动所述承料台沿所述导向料杆上升或者下降,以提升承料台上的推力片至合适的高度,所述料盘一侧对应位置设有第二有料感应开关,所述分割器可驱动所述料盘作等角度转动,使得所述料杆组件转动至所述第二有料感应开关旁。
所述推力片上料机械手用于抓取推力片送至合套工位,包括推力片上料支架和设置在所述推力片上料支架上的推力片夹爪横向导轨组件、推力片夹爪纵向导轨组件、推力片夹爪连接板支架、推力片夹爪组件,所述推力片夹爪组件用于抓取推力片,所述推力片夹爪组件通过所述推力片夹爪连接板支架连接于所述推力片夹爪纵向导轨组件上,并可随所述推力片夹爪纵向导轨组件上下移动,所述推力片夹爪纵向导轨组件连接于所述推力片夹爪横向导轨组件上并可沿所述推力片夹爪横向导轨组件左右移动,从而带动所述推力片夹爪组件沿所述推力片夹爪横向导轨组件左右移动。
为了更加高效、精准地抓取推力片至合套工位,所述推力片夹爪组件包括推力片夹爪气缸、压板、感应片、接近开关和中间支撑板,所述中间支撑板通过第一直线轴承连接于所述推力片夹爪连接板支架下端,所述压板通过第二直线轴承连接于所述中间支撑板下端,所述第二直线轴承贯穿所述中间支撑板设置,所述感应片连接于所述第二直线轴承上端,所述推力片夹爪气缸连接于所述中间支撑板下端,所述接近开关连接于所述中间支撑板一侧,所述第一直线轴承和第二直线轴承上分别套设有第二弹簧和第三弹簧。
所述平面轴承合套部用于将平面轴承和推力片进行合套,包括产品夹爪气缸组件、定位传感器、夹爪气缸移动板、平移驱动装置、合套滚压轮组件、滚压轮连接支架、合套驱动装置、第一直线导轨、第二直线导轨,所述产品夹爪气缸组件用于放置待合套的平面轴承和推力片,所述产品夹爪气缸组件和定位传感器设置于所述夹爪气缸移动板上,所述平移驱动装置与所述夹爪气缸移动板连接,所述夹爪气缸移动板设置于所述第一直线导轨上并可在所述平移驱动装置作用下沿所述第一直线导轨左右平移,从而带动所述产品夹爪气缸组件和定位传感器左右平移,所述合套驱动装置与所述滚压轮连接支架连接,所述合套滚压轮组件通过所述滚压轮连接支架设置于所述第二直线导轨上,并可在所述合套驱动装置作用下沿所述第二直线导轨左右移动。
为了更加方便地铆压、合套,所述产品夹爪气缸组件包括产品放置座和设置于所述产品放置座下方的合套旋转机构,所述合套旋转机构可驱动所述产品放置座作等角度转动。
作为优选,所述合套旋转机构包括旋转驱动装置、由内到外同轴设置的中间轴、轴承和轴承座,所述产品放置座设置于所述中间轴上,所述旋转驱动装置可驱动所述中间轴作等角度转动。
为了提高效率,保证压点的可靠性和准确性,达到最佳的铆压、合套效果,所述合套滚压轮组件包括同轴设置的滚压轮轴、滚压轮轴承和滚压轮,所述滚压轮通过所述滚压轮轴承套设在所述滚压轮轴外。
所述平移机械手包括搬运动力件和连接在所述搬运动力件上的推块组件,所述搬运动力件可驱动所述推块组件在平面内移动。
为了在结构尽可能简单的前提下提高传送效率和传送精度,所述推块组件包括推块和限位块,所述推块两侧延伸有推边,所述限位块呈V型,设置于所述推边上。
所述平面轴承组件高度测量部用于检测合套完成的平面轴承成品高度以判定合套是否到位,包括测量部支架、支撑轴、上测量座组件、下测量座、顶升轴、下测量座顶升动力件、测头组件和测头组件升降驱动件,所述测量部支架具有测量台,所述测量台上设有第三有料感应开关,所述上测量座组件通过所述支撑轴连接于所述测量部支架上,所述下测量座顶升动力件通过所述顶升轴与所述下测量座连接并可驱动所述下测量座上下移动,所述下测量座顶升动力件与所述顶升轴之间设有压力传感器,所述下测量座外圆沿周向开设有若干测杆槽,所述测头组件升降驱动件与所述测头组件连接并可驱动所述测头组件沿所述测杆槽上下移动。
为了提高测量精度,所述上测量座组件包括从下至上依次同轴设置的上测量座、关节轴承组件、压板,所述关节轴承组件包括关节轴承和轴承座,所述上测量座组件可绕所述关节轴承中心自由转动,可保证待检测的产品与上下两端的测量座紧密贴合。
为了提高测量便利性和测量精度,所述测头组件包括测量升降板、若干测量杆、测量传感器和传感器驱动装置,所述测量杆和测量传感器数量一致,所述测量杆连接于所述测量升降板上,所述测量杆中部具有测量凸台,顶端设有测头,所述测量杆上设有第四弹簧,所述测量传感器通过传感器固定环连接于所述测量升降板上,所述测量传感器具有可伸缩的传感器测头,所述传感器驱动装置可驱动所述传感器测头伸缩
所述NG排料部用于将合套后的不合格品剔除、集中回收,为了更加高效地实现这一功能,所述NG排料部包括NG料仓、NG料仓门、NG料仓门驱动装置和NG排料确认光纤开关,所述NG料仓为上口敞开的半封闭箱体结构,所述NG料仓门设置在所述NG料仓的上口,所述NG料仓门驱动装置与所述NG料仓门连接并可驱动所述NG料仓门开启或关闭,所述NG排料确认光纤开关设置于所述NG料仓门一侧。
本发明的有益效果是:该全自动平面轴承合套及组件高度测量一体机通过特殊设计的平面轴承进料部、平面轴承上下料机械手、推力片料仓、推力片上料机械手、平面轴承合套部、平移机械手、平面轴承组件高度测量部和NG排料部的相互配合,能够自动完成平面轴承和推力片的上料、合套及检测功能,自动化程度高,合套效率高,大大降低了工人的劳动强度,具有测量功能,可保证合套后产品的质量,降低了次品率,大大提高了产品的可靠性。
附图说明:
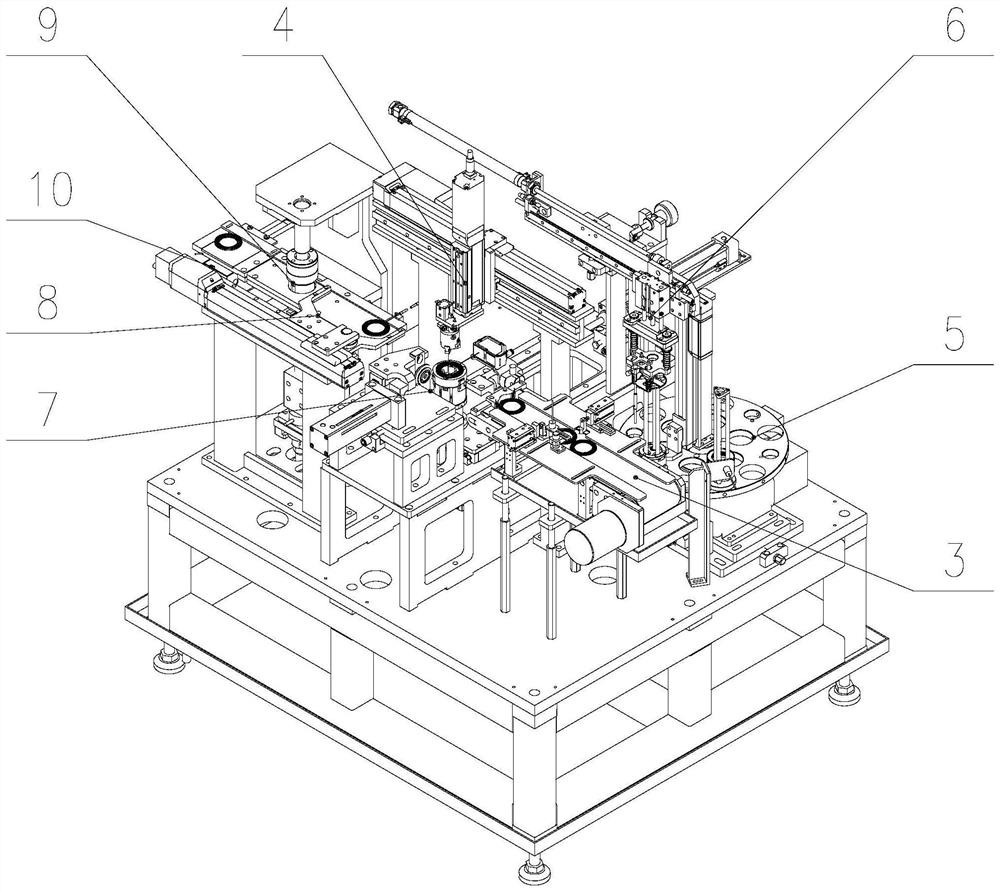
图1为本发明的全自动平面轴承合套及组件高度测量一体机的立体结构示意图;
图2为本发明的全自动平面轴承合套及组件高度测量一体机主体结构的立体结构示意图;
图3为图2的俯视图;
图4为本发明的平面轴承进料部的立体结构示意图;
图5为本发明的平面轴承上下料机械手的立体结构示意图;
图6为本发明的轴承夹爪组件的立体结构示意图;
图7为图6的右视图;
图8为本发明的推力片料仓的立体结构示意图;
图9为本发明的推力片上料机械手的立体结构示意图;
图10为本发明的推力片夹爪组件的立体结构示意图;
图11为本发明的平面轴承合套部的立体结构示意图;
图12为图11的俯视图;
图13为图12的A-A视图;
图14为本发明的产品夹爪气缸组件的局部放大图;
图15为图12的B-B视图;
图16为本发明的平面轴承合套部的气管示意图;
图17为本发明的平移机械手的立体结构示意图;
图18-20为本发明的平面轴承组件高度测量部的结构示意图;
图21为本发明的上测量座组件和测头组件的结构示意图;
图22为本发明的NG排料部的立体结构示意图;
图23为本发明的推力片的立体结构示意图。
具体实施方式
下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易被本领域人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
如图1-3所示的一种全自动平面轴承合套及组件高度测量一体机,包括电箱控制装置1、台架2以及设置在所述台架2中的平面轴承进料部3、平面轴承上下料机械手4、推力片料仓5、推力片上料机械手6、平面轴承合套部7、平移机械手8、平面轴承组件高度测量部9和NG排料部10。
所述平面轴承进料部3用于传送、分隔待合套的平面轴承11,如图4所示,包括输送机构31、隔料组件32、第一有料感应开关33、侧边挡板34和定位块35,所述输送机构31包括传送带311和传送带驱动装置312,所述侧边挡板34设置在所述传送带311两侧,所述第一有料感应开关33和所述定位块35设置在所述传动带311输出端,所述定位块35呈V型且开口朝向所述传送带311输入端,所述隔料组件32设置在一侧的侧边挡板34上,用于阻挡或放行所述传送带311上待合套的平面轴承11,包括隔料块321和隔料块驱动机构322,所述隔料块驱动机构322可驱动所述隔料块321伸缩以阻挡或放行所述传送带311上待合套的平面轴承11。
所述平面轴承上下料机械手4用于抓取待合套的平面轴承11至合套工位以及将合套后的平面轴承成品13抓取至高度检测工位,如图5所示,包括轴承夹爪横向导轨组件41、轴承夹爪纵向导轨组件42、轴承夹爪连接板支架43、轴承夹爪组件44,所述轴承夹爪组件44用于抓取待合套的平面轴承11,所述轴承夹爪组件44通过所述轴承夹爪连接板支架43连接于所述轴承夹爪纵向导轨组件42上,并可随所述轴承夹爪纵向导轨组件42上下移动,所述轴承夹爪纵向导轨组件42连接于所述轴承夹爪横向导轨组件41上并可沿所述轴承夹爪横向导轨组件41左右移动,从而带动所述轴承夹爪组件44沿所述轴承夹爪横向导轨组件41左右移动。
如图6-7所示,所述轴承夹爪组件44包括轴承夹爪气缸441、转轴442、角度复位气缸组件443、水平调节螺杆444和角度倾斜大小调节螺杆445,所述轴承夹爪气缸441通过所述转轴442连接于所述轴承夹爪连接板支架43下端并可绕所述转轴442转动,所述角度复位气缸组件443连接于所述轴承夹爪连接板支架43上平面,所述角度复位气缸组件443包括角度复位气缸4431和顶杆4432,所述轴承夹爪连接板支架43上对应于所述转轴442两侧分别开设有顶杆孔431和水平调节螺杆孔432,所述角度复位气缸4431可驱动所述顶杆4432在所述顶杆孔431中伸缩,所述水平调节螺杆444设置在所述水平调节螺杆孔432上平面并可在所述水平调节螺杆孔432内旋进旋出,所述水平调节螺杆444上套设有第一弹簧45,所述轴承夹爪气缸441上平面开设有角度大小调节螺杆孔4411,所述角度倾斜大小调节螺杆445设置于所述角度大小调节螺杆孔4411下平面并可在所述角度大小调节螺杆孔4411内旋进旋出。
所述推力片料仓5用于存放和提供推力片12,如图8所示,包括底座51、设置在所述底座51上的分割器52、料盘53以及设置在所述料盘53上的提升驱动组件54和若干料杆组件55,所述料杆组件55包括导向料杆551和承料台552,所述提升驱动组件54可驱动所述承料台552沿所述导向料杆551上升或者下降,所述料盘53一侧对应位置设有第二有料感应开关56,所述分割器52可驱动所述料盘53作等角度转动,使得所述料杆组件55转动至所述第二有料感应开关56旁。
所述推力片上料机械手6用于抓取推力片12送至合套工位,如图9所示,包括推力片上料支架61和设置在所述推力片上料支架61上的推力片夹爪横向导轨组件62、推力片夹爪纵向导轨组件63、推力片夹爪连接板支架64和推力片夹爪组件65,所述推力片夹爪组件65用于抓取推力片12,所述推力片夹爪组件65通过所述推力片夹爪连接板支架64连接于所述推力片夹爪纵向导轨组件63上,并可随所述推力片夹爪纵向导轨组件63上下移动,所述推力片夹爪纵向导轨组件63连接于所述推力片夹爪横向导轨组件62上并可沿所述推力片夹爪横向导轨组件62左右移动,从而带动所述推力片夹爪组件65沿所述推力片夹爪横向导轨组件62左右移动。
如图10所示,所述推力片夹爪组件65包括推力片夹爪气缸651、压板652、感应片653、接近开关654和中间支撑板655,所述中间支撑板655通过第一直线轴承656连接于所述推力片夹爪连接板支架64下端,所述压板652通过第二直线轴承657连接于所述中间支撑板655下端,所述第二直线轴承657贯穿所述中间支撑板655设置,所述感应片653连接于所述第二直线轴承657上端,所述推力片夹爪气缸651连接于所述中间支撑板655下端,所述接近开关654连接于所述中间支撑板655一侧,所述第一直线轴承656和第二直线轴承657上分别套设有第二弹簧658和第三弹簧659。
所述平面轴承合套部7用于将平面轴承11和推力片12进行合套,如图11-13所示,包括产品夹爪气缸组件71、定位传感器72、夹爪气缸移动板73、平移驱动装置74、合套滚压轮组件75、滚压轮连接支架76、合套驱动装置77、第一直线导轨78、第二直线导轨79,所述产品夹爪气缸组件71用于放置待合套的平面轴承11和推力片12,所述产品夹爪气缸组件71和定位传感器72设置于所述夹爪气缸移动板73上,所述平移驱动装置74与所述夹爪气缸移动板73连接,所述夹爪气缸移动板73设置于所述第一直线导轨78上并可在所述平移驱动装置74作用下沿所述第一直线导轨78左右平移,所述合套驱动装置77与所述滚压轮连接支架76连接,所述合套滚压轮组件75通过所述滚压轮连接支架76设置于所述第二直线导轨79上,并可在所述合套驱动装置77作用下沿所述第二直线导轨79左右移动。
如图14所示,所述产品夹爪气缸组件71包括产品放置座711和设置于所述产品放置座711下方的合套旋转机构712,所述合套旋转机构712可驱动所述产品放置座711作等角度转动。所述合套旋转机构712包括旋转驱动装置7121、由内到外同轴设置的中间轴7122、轴承7123和轴承座7124,所述产品放置座711设置于所述中间轴7122上,所述旋转驱动装置7121可驱动所述中间轴7122作等角度转动。
如图15所示,所述合套滚压轮组件75包括同轴设置的滚压轮轴751、滚压轮轴承752和滚压轮753,所述滚压轮753通过所述滚压轮轴承752套设在所述滚压轮轴751外。
如图17所示,所述平移机械手8包括搬运动力件81和连接在所述搬运动力件81上的推块组件82,所述搬运动力件81可驱动所述推块组件82在平面内移动,所述推块组件82包括推块821和限位块822,所述推块821两侧延伸有推边8211,所述限位块822呈V型,设置于所述推边8211上。
所述平面轴承组件高度测量部9用于检测合套完成的平面轴承成品13高度,以判定合套是否到位,如图18-20所示,包括测量部支架91、支撑轴92、上测量座组件93、下测量座94、下测量座顶升动力件95、测头组件96、测头组件升降驱动件97和顶升轴98,所述测量部支架91具有测量台911,所述测量台911上设有第三有料感应开关99,所述上测量座组件93通过所述支撑轴92连接于所述测量部支架91上,所述下测量座顶升动力件95通过所述顶升轴98与所述下测量座94连接并可驱动所述下测量座94上下移动,所述下测量座顶升动力件95与所述顶升轴98之间设有压力传感器951,所述下测量座94外圆沿周向开设有若干测杆槽941,所述测头组件升降驱动件97与所述测头组件96连接并可驱动所述测头组件96沿所述测杆槽941上下移动。
如图21所示,所述上测量座组件93包括从下至上依次同轴设置的上测量座931、关节轴承组件932、压板933,所述关节轴承组件932包括关节轴承9321和轴承座9322,所述上测量座组件93可绕所述关节轴承9321中心自由转动。
所述测头组件96包括测量升降板961、若干测量杆962、测量传感器964和传感器驱动装置965,所述测量杆962和测量传感器964数量一致,所述测量杆962连接于所述测量升降板961上,所述测量杆962中部具有测量凸台9621,顶端设有测头963,所述测量杆962上设有第四弹簧967,所述测量传感器964通过传感器固定环966连接于所述测量升降板961上,所述测量传感器964具有可伸缩的传感器测头9641,所述传感器驱动装置965可驱动所述传感器测头9641伸缩。
所述NG排料部10用于将合套后的不合格品剔除、集中回收,如图22所示,包括NG料仓101、NG料仓门102、NG料仓门驱动装置103和NG排料确认光纤开关104,所述NG料仓101为上口敞开的半封闭箱体结构,所述NG料仓门102设置在所述NG料仓101的上口,所述NG料仓门驱动装置103与所述NG料仓门102连接并可驱动所述NG料仓门102开启或关闭,所述NG排料确认光纤开关104设置于所述NG料仓门102一侧。
使用该全自动平面轴承合套及组件高度测量一体机进行合套作业前,需要先调节水平调节螺杆444至合适深度,确保顶杆4432顶住轴承夹爪气缸441时轴承夹爪气缸441可处于水平状态,同时根据合套时待合套的平面轴承11所需的倾斜角度调节角度倾斜大小调节螺杆445。
使用该全自动平面轴承合套及组件高度测量一体机进行合套作业时,首先,由平面轴承进料部3和平面轴承上下料机械手4向平面轴承合套部7提供待合套的平面轴承11,由推力片料仓5和推力片上料机械手6向平面轴承合套部7提供待合套的推力片12。
具体为,提升驱动组件54驱动承料台552带动承料台552上的推力片12上升至预设高度,第二有料感应开关56反馈有料信号,推力片上料机械手6抓取一个推力片12转移至平面轴承合套部7的产品放置座711上。
待合套的平面轴承11依次随传送带311移动至与定位块35接触,第一有料感应开关33反馈有料信号,平面轴承上下料机械手4抓取一个待合套的平面轴承11,此时顶杆4432顶住轴承夹爪气缸441,轴承夹爪气缸441处于水平状态,待抓取平面轴承11后,角度复位气缸4431驱动顶杆4432收回,在第一弹簧45作用下轴承夹爪气缸441倾斜至角度倾斜大小调节螺杆445的下平面,平面轴承上下料机械手4抓取待合套的平面轴承11斜放入推力片12中。
然后进行合套作业,如图23所示,推力片12上具有三个锁扣点121,定位传感器72找到锁扣点121位置,反馈信号,平面轴承上下料机械手4根据信号抓取待合套的平面轴承11斜放入推力片12的锁扣点121内,接着,合套旋转机构712驱动产品放置座711作等角度转动,滚压轮753对滚压点122逐个进行滚压,两者配合边转动边滚压,从而将整个平面轴承11压入推力片12中,滚压轮753对锁扣点121进行逐个滚压加固,完成最终的合套。
最后对合套完成的平面轴承成品13进行高度测量,具体为,使用平面轴承上下料机械手4和平移机械手8将平面轴承成品13转移至测量台911上,第三有料感应开关99检测到平面轴承成品13到位,反馈信号,下测量座顶升动力件95驱动下测量座94上移,配合上测量座组件93将平面轴承成品13压紧,根据压力传感器951反馈的信号确认平面轴承成品13完全压实后,测头组件升降驱动件97驱动测头组件96上移至测头963与平面轴承成品13下平面接触,传感器驱动装置965驱动测量传感器964的传感器测头9641伸出至各测量杆962的测量凸台9621的下平面,读取相应的位置参数,进行比对,从而判断平面轴承成品13各点位高度是否一致,进而判断出平面轴承成品13合套是否到位。
经过平面轴承组件高度测量部9的高度测量后,若判定产品合格,则合格品流转进下一道工序,若判定不合格,则NG料仓门驱动装置103驱动NG料仓门102打开,不合格产品落入NG料仓101内集中存放,NG排料确认光纤开关104可确认不合格品是否落入NG料仓101内。
此实施例中定位传感器72选用基恩士IX-055传感器。
需要说明的是,本发明中的动力件、驱动件、驱动装置等,可以是气缸、电缸、电机、油缸等相似动力件,或结合相应的连杆类机构实现,并不局限于本发明描述或附图中的机构。
在本发明的描述中,需要说明的是,术语“上”、“下”、“左”、“右”、“顶”、“底”、“侧”、“端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
另外,在本发明实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”、“设有”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
最后应说明的是:以上实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。