一种光学测量安息角的系统
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及测量技术领域,尤其涉及一种光学测量安息角的系统。
背景技术
现有的粉末安息角测定仪主要由一个漏斗、支座、量角器和料盘组成,其中支座为整个装置的支承件,由两个圆盘和四根立柱组成,漏斗固定在支座的上圆盘上,料盘固定在支座的下圆盘上,料盘与漏斗同轴心;量角器铰接在支座竖直杆上。该粉末安息角测定仪在工作时,加入粉末到漏斗上,粉末下落到料盘上后,转动量角器使量角器的直边与粉末锥体母线接触,读出量角器上标注的数值,实现对粉末安息角的测定,整个装置处于开放空间内物料从漏斗落下时,可能会产生扬尘不利于操作者健康,为此,我们提出一种光学测量安息角的系统。
发明内容
本发明主要是解决上述现有技术所存在的技术问题,提供一种光学测量安息角的系统。
为了实现上述目的,本发明采用了如下技术方案,一种光学测量安息角的系统,包括底板和顶板,所述底板为内部中空的矩形盒状,底板的内部中空区域贯穿底板的前侧壁面和底板的左右两侧壁面,所述底板的底部壁面设置有四组支撑板,支撑板为矩形块状,四组支撑板中相互平行的两组支撑板在底板的底部壁面呈镜像布置,所述底板的外部左侧壁面活动安装有左侧板,左侧板为矩形块状,所述左侧板的左侧壁面开设有活动孔,活动孔为圆形孔,活动孔贯穿左侧板的右侧壁面延伸至底板的内部,所述顶板的顶部壁面固定安装有进料孔,进料孔为圆形柱状,进料孔的顶部壁面开设有圆形孔,进料孔顶部壁面开设的圆形孔贯穿进料孔的底部壁面延伸至底板的内部,所述顶板的底部壁面固定安装有漏斗,漏斗的外径自上往下逐渐变小,所述底板的顶部壁面固定安装有转台,转台与漏斗与进料孔同轴心,转台为内部空心结构,所述转台的左侧壁面固定安装有电机盒,电机盒为空心结构,所述电机盒的内部设置有电机,电机为已有技术,在此不做赘述,所述电机的输出轴上固定安装有传动齿轮,所述传动齿轮的输出轴上啮合有转动齿轮,所述转动齿轮的顶部壁面固定安装有转盘,所述底板的内部右侧壁面固定安装有光源,所述底板的顶部壁面固定安装有投影屏,所述底板的外部前侧壁面活动安装有前侧板,所述底板的顶部壁面前后两端均固定安装有垂直滑轨,两组垂直滑轨在底板的顶部壁面前后两端呈镜像布置,两组所述垂直滑轨相互靠近的一侧壁面均活动安装有垂直滑块。
作为优选,两组所述垂直滑块相互靠近的一侧壁面固定安装有水平滑轨。
作为优选,所述水平滑轨的顶部活动安装有水平滑块。
作为优选,所述水平滑块的顶部壁面固定安装有伸缩块。
作为优选,所述伸缩块的右侧壁面固定安装有摄像头。
有益效果
本发明提供了一种光学测量安息角的系统,具备以下有益效果:
(1)、该光学测量安息角的系统,移动前侧板的位置使前侧板与底板与投影屏与与右侧板形成一个封闭的空间,粉末需要先从进料孔上倒入漏斗中,接着粉末依靠重力落到转台上并形成粉末堆,等到粉末堆状态稳定后,右侧板打开,照射粉末堆于投影屏上形成投影,移动前侧板再打开摄像头,根据摄像头观察到的粉末堆在投影屏上的成像情况,调节垂直滑块在垂直滑轨上的位置和水平滑块在水平滑轨上的位置,使得摄像头位置姿态满足具体成像要求,避免了,整个装置处于开放空间内物料从漏斗落下时,产生扬尘被人体吸入不利于操作者健康的情况发生。
(2)、该光学测量安息角的系统,移动前侧板的位置使前侧板与底板与投影屏与与右侧板形成一个封闭的空间,粉末需要先从进料孔上倒入漏斗中,接着粉末依靠重力落到转台上并形成粉末堆,等到粉末堆状态稳定后,右侧板打开,照射粉末堆于投影屏上形成投影,移动前侧板再打开摄像头,根据摄像头观察到的粉末堆在投影屏上的成像情况,调节垂直滑块在垂直滑轨上的位置和水平滑块在水平滑轨上的位置,使得摄像头位置姿态满足具体成像要求,避免了,整个装置处于开放空间内物料从漏斗落下在测量时粉末锥体时容易受到周边环境风出动的干扰影响测量精度的情况发生。
(3)、该光学测量安息角的系统,打开转台的电机使得粉末堆旋转,摄像头拍摄一段粉末堆投影视频,之后该视频传送给服务器后经过简单的截图切割将视频分成得到若干张粉末堆不同角度的照片,把照片输入到服务器内,再通过图像灰度化处理拍摄到的照片,再通过Sobel边缘检测时图像矢量化,通过矢量化后的图像读取粉末堆轮廓线上点的坐标,通过最小二乘法拟合出直线再通过服务器识别直线斜率输出斜率,最终该粉末堆的安息角大小就由每张图片所得结果平均求得,通过测量的自动化,达到了提升测量的效率的效。
(4)、该光学测量安息角的系统,打开转台的电机使得粉末堆旋转,摄像头拍摄一段粉末堆投影视频,之后该视频传送给服务器后经过简单的截图切割将视频分成得到若干张粉末堆不同角度的照片,这些照片再由安息角识别算法检测每张图片中安息角的大小,最终该粉末堆的安息角大小就由每张图片所得结果平均求得,通过测量的自动化,达到了提升测量的效率的效果。
附图说明
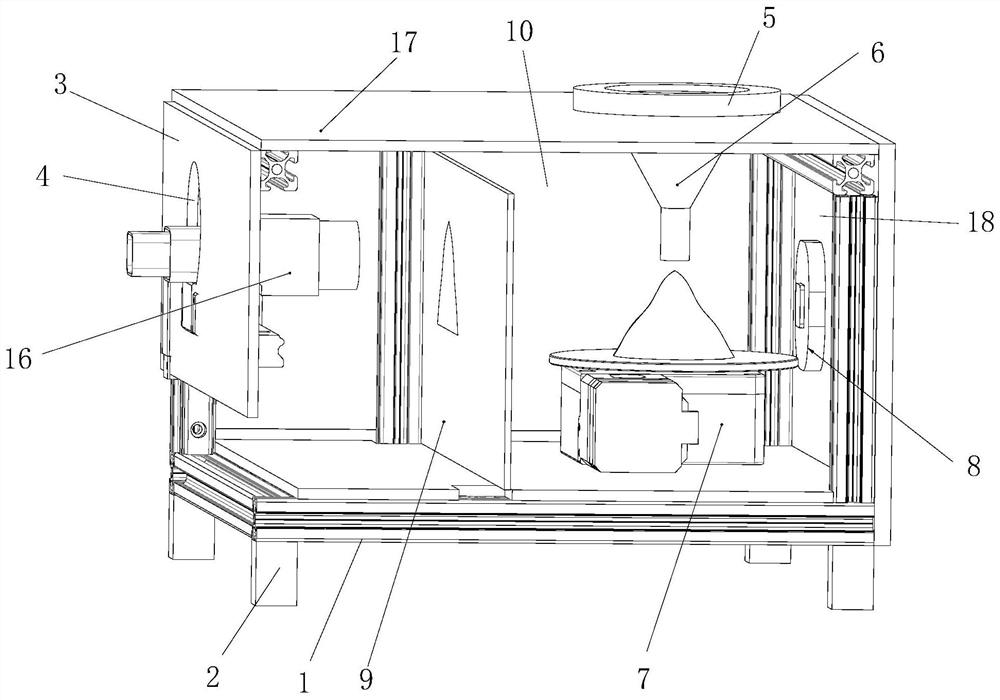
图1为本发明的整体示意图;
图2为本发明垂直滑轨的局部示意图;
图3为本发明顶板的局部示意图;
图4为本发明的系统示意图;
图5为本发明安息角算法的系统示意图;
图6为本发明转台的局部示意图。
图例说明:
1底板、2支撑板、3左侧板、4活动孔、5进料孔、6漏斗、7转台、8光源、9投影屏、10前侧板、11垂直滑轨、12垂直滑块、13水平滑轨、14水平滑块、15伸缩块、16摄像头、17顶板、18右侧板、19电机盒、20电机、21传动齿轮、22转动齿轮、23转盘。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
实施例:一种光学测量安息角的系统,如图1-图4所示,包括底板1和顶板17,所述底板1为内部中空的矩形盒状,底板1的内部中空区域贯穿底板1的前侧壁面和底板1的左右两侧壁面,所述底板1的底部壁面设置有四组支撑板2,支撑板2为矩形块状,四组支撑板2中相互平行的两组支撑板2在底板1的底部壁面呈镜像布置,所述底板1的外部左侧壁面活动安装有左侧板3,所述左侧板3的左侧壁面开设有活动孔4,活动孔4为圆形孔,活动孔4贯穿左侧板3的右侧壁面延伸至底板1的内部,所述顶板17的顶部壁面固定安装有进料孔5,进料孔5为圆形柱状,进料孔5的顶部壁面开设有圆形孔,进料孔5顶部壁面开设的圆形孔贯穿进料孔5的底部壁面延伸至底板1的内部,所述顶板17的底部壁面固定安装有漏斗6,漏斗6的外径自上往下逐渐变小,所述底板1的顶部壁面固定安装有转台7,转台7与漏斗6与进料孔5同轴心,转台7为内部空心结构,所述转台7的左侧壁面固定安装有电机盒19,电机盒19为空心结构,所述电机盒19的内部设置有电机20,电机20为已有技术,在此不做赘述,所述电机20的输出轴上固定安装有传动齿轮21,所述传动齿轮21的输出轴上啮合有转动齿轮22,所述转动齿轮22的顶部壁面固定安装有转盘23,所述底板1的内部右侧壁面固定安装有光源8,光源8为已有技术,在此不做赘述,所述底板1的顶部壁面固定安装有投影屏9,所述底板1的外部前侧壁面活动安装有前侧板10,所述底板1的顶部壁面前后两端均固定安装有垂直滑轨11,两组垂直滑轨11在底板1的顶部壁面前后两端呈镜像布置,两组所述垂直滑轨11相互靠近的一侧壁面均活动安装有垂直滑块12,两组垂直滑块12相互靠近的一侧壁面固定安装有水平滑轨13,所述水平滑轨13的顶部活动安装有水平滑块14,所述水平滑块14的顶部壁面固定安装有伸缩块15,伸缩块15为已有技术,在此不做赘述,所述伸缩块15的右侧壁面固定安装有摄像头16,摄像头16为已有技术,在此不做赘述。
本发明的工作原理:
在使用时,移动前侧板10的位置使前侧板10与底板1与投影屏9与与右侧板18形成一个封闭的空间,粉末需要先从进料孔5上倒入漏斗6中,接着粉末依靠重力落到转台7上并形成粉末堆。等到粉末堆状态稳定后,右侧板18打开,照射粉末堆于投影屏9上形成投影,移动前侧板10再打开摄像头16,根据摄像头16观察到的粉末堆在投影屏9上的成像情况,调节垂直滑块12在垂直滑轨11上的位置和水平滑块14在水平滑轨13上的位置,使得摄像头16位置姿态满足具体成像要求,避免了由于产生扬尘不利于操作者健康的情况发生。
打开转台7的电机使得粉末堆旋转,摄像头16拍摄一段粉末堆投影视频,之后该视频传送给服务器后经过简单的截图切割将视频分成得到若干张粉末堆不同角度的照片,这些照片再由安息角识别算法检测每张图片中安息角的大小,最终该粉末堆的安息角大小就由每张图片所得结果平均求得,实现了测量非接触进行,减少了人为的干扰提高了测量的精确度和可靠性。
打开转台7的电机使得粉末堆旋转,摄像头16拍摄一段粉末堆投影视频,之后该视频传送给服务器后经过简单的截图切割将视频分成得到若干张粉末堆不同角度的照片。
打开转台7的电机使得粉末堆旋转,摄像头16拍摄一段粉末堆投影视频,之后该视频传送给服务器后经过简单的截图切割将视频分成得到若干张粉末堆不同角度的照片,把照片输入到服务器内,再通过图像灰度化处理拍摄到的照片,再通过Sobel边缘检测时图像矢量化,通过矢量化后的图像读取粉末堆轮廓线上点的坐标,通过最小二乘法拟合出直线再通过服务器识别直线斜率输出斜率,最终该粉末堆的安息角大小就由每张图片所得结果平均求得,通过测量的自动化,达到了提升测量的效率的效果。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种光学测量安息角的系统
- 一种堆料机堆料过程中料高和安息角测量方法及系统