隐藏式电子把手的全性能自动检测装置及其使用方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及利用无线电波的测量领域,具体为一种隐藏式电子把手的全性能自动检测装置及其使用方法。
背景技术
目前,汽车隐藏式电子把手的全性能检测都是以人工操作逐个检测各项性能,在生产检测过程中始终会受到人工作业带来的不稳定性的干扰,造成检测质量参差不齐,误判概率高,生产效率低下。
发明内容
为了克服现有技术的缺陷,提供一种自动化程度高、检测准确、一致性好的检测设备,本发明公开了一种隐藏式电子把手的全性能自动检测装置及其使用方法。
本发明通过如下技术方案达到发明目的:
一种隐藏式电子把手的全性能自动检测装置,包括工作平台,工作平台上的一角相邻地设有不合格产品区和合格产品下线区,其特征是:还包括定位夹具、接地电阻测试装置、显示屏、颜色检测装置、亮度检测装置、多功能检测装置、工业相机检测仪、激光追溯打标机、六轴关节机器人和吸尘器,
六轴关节机器人的底座固定在工作平台的中部,六轴关节机器人工作臂的底部可转动地设于底座上,工作臂底部相对底座的转动平面为和工作平台平行的平面,
定位夹具、接地电阻测试装置、显示屏、颜色检测装置、多功能检测装置、工业相机检测仪和激光追溯打标机围绕底座依次设于工作平台的边缘处,其中定位夹具设于合格产品下线区的一侧,亮度检测装置设于颜色检测装置上,激光追溯打标机的一侧设有雾粉尘吸尘器。
所述的隐藏式电子把手的全性能自动检测装置,其特征是:
工作平台为矩形,所述矩形的长是宽的100%~120%,合格产品下线区、颜色检测装置、激光追溯打标机和雾粉尘吸尘器依次设于工作平台的四个角上,定位夹具、接地电阻测试装置和显示屏依次设于合格产品下线区和定位夹具之间,多功能检测装置和工业相机检测仪依次设于颜色检测装置和激光追溯打标机之间。
所述的隐藏式电子把手的全性能自动检测装置的使用方法,其特征是:按如下步骤依次实施:
① 读取:将待检测的隐藏式电子把手放入被测件定位夹具中,并将隐藏式电子把手的天线插头插入定位夹具的测试插座内,在显示屏上读取隐藏式电子把手天线PCB板中的ID数据信息并同时记录在显示屏的存储器中;
② 测电阻:六轴关节机器人的工作臂抓取隐藏式电子把手移入接地电阻测试装置,接地电阻测试装置通过探针向隐藏式电子把手的饰条表面通入电流并测得电阻值,所得电阻值同步显示在显示屏上并同时记录在显示屏的存储器中,如果电阻值不合格,则六轴关节机器人将隐藏式电子把手放入不合格产品区,准备下一次检测;
③ 测颜色:如果电阻值合格,则六轴关节机器人将隐藏式电子把手移入颜色检测装置,颜色检测装置内设有颜色传感器,所述颜色传感器接收到隐藏式电子把手的反射光信号,颜色检测装置将所述反射光信号和储存的颜色数据对比,对比结果同步显示在显示屏上并同时记录在显示屏的存储器中,如果颜色对比不合格,则六轴关节机器人将隐藏式电子把手放入不合格产品区,准备下一次检测;
④ 测亮度:如果颜色对比合格,则亮度检测装置检测隐藏式电子把手上个测试点位覆盖灯带的亮度,检测结果同步显示在显示屏上并同时记录在显示屏的存储器中,如果检测结果不合格,则六轴关节机器人将隐藏式电子把手放入不合格产品区,准备下一次检测;
⑤ 测压力位移:如果亮度检测合格,则六轴关节机器人将隐藏式电子把手移入多功能检测装置,多功能检测装置内设有伺服电缸、所述伺服电缸上设有压力传感器和位移传感器,所述伺服电缸对隐藏式电子把手作上锁和解锁,上锁和解锁的同时所述压力传感器和所述位移传感器测得压力值和位移值,压力值和位移值同步显示在显示屏上并同时记录在显示屏的存储器中,如果压力值或位移值不符合要求,则六轴关节机器人将隐藏式电子把手放入不合格产品区,准备下一次检测;
⑥ 测装配:如果压力值和位移值都符合要求,则六轴关节机器人将隐藏式电子把手移入工业相机检测仪的拍摄区域,工业相机检测仪拍摄隐藏式电子把手外观并判断是否存在零件缺失以及零件之间的装配间隙是否符合要求,判断结果同步显示在显示屏上并同时记录在显示屏的存储器中,如果判断不合格,则六轴关节机器人将隐藏式电子把手放入不合格产品区,准备下一次检测;
⑦ 打标:在隐藏式电子把手通过工业相机检测仪的检测后,由六轴关节机器人将隐藏式电子把手移入激光追溯打标机的打标工位,激光追溯打标机将追溯信息用激光打标在隐藏式电子把手上,打标的同时吸尘器把打标产生的粉尘吸干净,避免粉尘干扰检测的准确性;
⑧ 校对:打标完成后,六轴关节机器人将隐藏式电子把手移入工业相机检测仪的拍摄区域,工业相机检测仪对隐藏式电子把手进行追溯信息的扫描识别以予以校对,校对结果同步显示在显示屏上并同时记录在显示屏的存储器中,如果校对不合格,则六轴关节机器人将隐藏式电子把手放入不合格产品区,准备下一次检测;
⑨ 完成:如果校对合格,则六轴关节机器人将隐藏式电子把手移入合格产品下线区。
所述的隐藏式电子把手的全性能自动检测装置的使用方法,其特征是:步骤⑦时,激光追溯打标机打标的追溯信息为二维码。
本发明具有如下有益效果:解决了人工难以完成的多项检测,自动化程度高,检测准确,符合工业4.0的要求。
附图说明
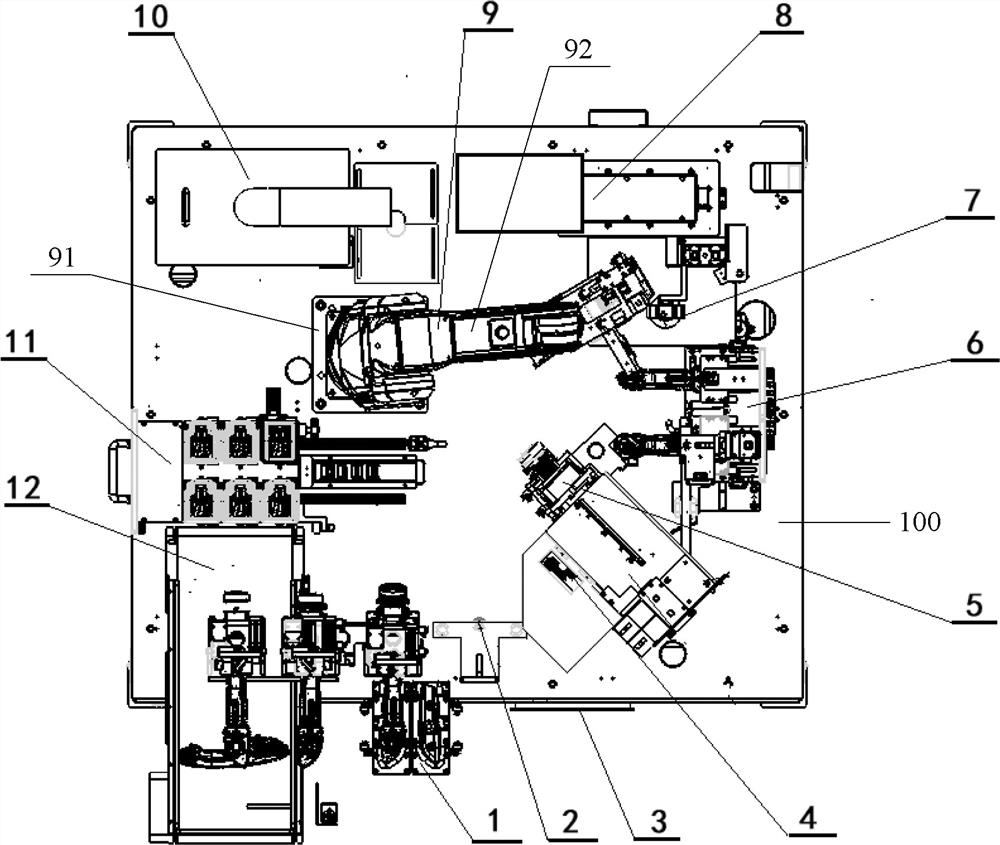
图1是本发明的结构示意图,
图2是本发明使用时的流程图。
具体实施方式
以下通过具体实施例进一步说明本发明。
实施例1
一种隐藏式电子把手的全性能自动检测装置,包括工作平台100、定位夹具1、接地电阻测试装置2、显示屏3、颜色检测装置4、亮度检测装置5、多功能检测装置6、工业相机检测仪7、激光追溯打标机8、六轴关节机器人9和吸尘器10,如图1所示,具体结构是:
工作平台100上的一角相邻地设有不合格产品区11和合格产品下线区12;
六轴关节机器人9的底座91固定在工作平台100的中部,六轴关节机器人9工作臂92的底部可转动地设于底座91上,工作臂92底部相对底座91的转动平面为和工作平台100平行的平面,
定位夹具1、接地电阻测试装置2、显示屏3、颜色检测装置4、多功能检测装置6、工业相机检测仪7和激光追溯打标机8围绕底座91依次设于工作平台100的边缘处,其中定位夹具1设于合格产品下线区12的一侧,亮度检测装置5设于颜色检测装置4上,激光追溯打标机8的一侧设有雾粉尘吸尘器10。
本实施例中:
工作平台100为矩形,所述矩形的长是宽的100%~120%,合格产品下线区12、颜色检测装置4、激光追溯打标机8和雾粉尘吸尘器10依次设于工作平台100的四个角上,定位夹具1、接地电阻测试装置2和显示屏3依次设于合格产品下线区12和定位夹具1之间,多功能检测装置6和工业相机检测仪7依次设于颜色检测装置4和激光追溯打标机8之间。
本实施例使用时,隐藏式电子把手需检测的项目包括:饰条的接地电阻、颜色、LED灯的亮度、上锁或解锁时锁舌所能承载的压力和行程、零件装配是否齐全以及装配间隙。如图2所示:按如下步骤依次实施:
① 读取:将待检测的隐藏式电子把手放入被测件定位夹具1中,并将隐藏式电子把手的天线插头插入定位夹具1的测试插座内,在显示屏3上读取隐藏式电子把手天线PCB板中的ID数据信息并同时记录在显示屏3的存储器中;
② 测电阻:六轴关节机器人9的工作臂92抓取隐藏式电子把手移入接地电阻测试装置2,接地电阻测试装置2通过探针向隐藏式电子把手的饰条表面通入电流并测得电阻值,所得电阻值同步显示在显示屏3上并同时记录在显示屏3的存储器中,如果电阻值不合格,则六轴关节机器人9将隐藏式电子把手放入不合格产品区11,准备下一次检测;
③ 测颜色:如果电阻值合格,则六轴关节机器人9将隐藏式电子把手移入颜色检测装置4,颜色检测装置4内设有颜色传感器,所述颜色传感器接收到隐藏式电子把手的反射光信号,颜色检测装置4将所述反射光信号和储存的颜色数据对比,对比结果同步显示在显示屏3上并同时记录在显示屏3的存储器中,如果颜色对比不合格,则六轴关节机器人9将隐藏式电子把手放入不合格产品区11,准备下一次检测;
④ 测亮度:如果颜色对比合格,则亮度检测装置5检测隐藏式电子把手上24个测试点位覆盖灯带的亮度,检测结果同步显示在显示屏3上并同时记录在显示屏3的存储器中,如果检测结果不合格,则六轴关节机器人9将隐藏式电子把手放入不合格产品区11,准备下一次检测;
⑤ 测压力位移:如果亮度检测合格,则六轴关节机器人9将隐藏式电子把手移入多功能检测装置6,多功能检测装置6内设有伺服电缸、所述伺服电缸上设有压力传感器和位移传感器,所述伺服电缸对隐藏式电子把手作上锁和解锁,上锁和解锁的同时所述压力传感器和所述位移传感器测得压力值和位移值,压力值和位移值同步显示在显示屏3上并同时记录在显示屏3的存储器中,如果压力值或位移值不符合要求,则六轴关节机器人9将隐藏式电子把手放入不合格产品区11,准备下一次检测;
⑥ 测装配:如果压力值和位移值都符合要求,则六轴关节机器人9将隐藏式电子把手移入工业相机检测仪7的拍摄区域,工业相机检测仪7拍摄隐藏式电子把手外观并判断是否存在零件缺失以及零件之间的装配间隙是否符合要求,判断结果同步显示在显示屏3上并同时记录在显示屏3的存储器中,如果判断不合格,则六轴关节机器人9将隐藏式电子把手放入不合格产品区11,准备下一次检测;
⑦ 打标:在隐藏式电子把手通过工业相机检测仪7的检测后,由六轴关节机器人9将隐藏式电子把手移入激光追溯打标机8的打标工位,激光追溯打标机8将二维码式的追溯信息用激光打标在隐藏式电子把手上,打标的同时吸尘器10把打标产生的粉尘吸干净,避免粉尘干扰检测的准确性;
⑧ 校对:打标完成后,六轴关节机器人9将隐藏式电子把手移入工业相机检测仪7的拍摄区域,工业相机检测仪7对隐藏式电子把手进行追溯信息的扫描识别以予以校对,校对结果同步显示在显示屏3上并同时记录在显示屏3的存储器中,如果校对不合格,则六轴关节机器人9将隐藏式电子把手放入不合格产品区11,准备下一次检测;
⑨ 完成:如果校对合格,则六轴关节机器人9将隐藏式电子把手移入合格产品下线区12。