基于物联网的自适应低功耗野生动物抓拍装置及方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及野生动物拍摄技术领域,具体的说是一种基于物联网的自适应低功耗野生动物抓拍装置及方法。
背景技术
准确掌握野生动物的种群分布、数量规模、生活环境、生存质量和栖息状况等信息,是野生动物生态学研究的基础,可为野生动物生态研究和有效保护野生动物提供科学依据。因此,网格化监测野生动物种群及分布信息极为重要。
除人工野外调查外,24h物联网自动监测是极为重要的技术手段。当前,野生动物红外拍摄相机在国内得到广泛应用,当野生动物出现在红外拍摄相机监测视场范围内时,通过红外热释电传感技术感知动物而触发相机拍摄,并将照片存储在数据存储卡中,由人工定期取卡获得野生动物拍摄照片或通过移动通信网络回传照片。
当前技术存在的主要缺陷在于:(1)电池更换频繁。通常采用一次性电池供电,例如太阳能或者充电电池供电。但电路设计功耗较高,供电周期最长3个月,造成频率更换电池的巨大工作量。(2)照相误报率高。通常采用单一的热释电传感监测识别技术,容易受到外界干扰或人员活动引起误报照相,大量误报照相既消耗电池能量,又造成大量照片筛选工作量。(3)外壳防护等级低。通常采用工程材料设计外壳,外壳防护等级较低,且受野外气候环境影响易损坏,整机持续工作寿命较短,可靠性较低。(4)无监测、易盗取。通常没有内部工作状态监测及防盗功能,既缺乏有效的设备运行状态监测,又容易被人为盗取。
发明内容
针对上述问题,本发明提供了一种基于物联网的自适应低功耗野生动物抓拍装置及方法,设置野生动物抓拍装置,结合双鉴别传感器,对野外视野进行探测,采用低功耗状态进行常规探测,当达到启动条件后,进行再次识别和拍摄。
为达到上述目的,本发明采用的具体技术方案如下:
一种基于物联网的自适应低功耗野生动物抓拍装置,其关键技术在于:包括铝合金壳体,该铝合金壳体内设置有主控制器MCU,该主控制器MCU的远距离红外采集端连接有第一鉴别传感器,所述主控制器MCU的聚焦红外采集端上连接有第二鉴别传感器,所述主控制器MCU的光采集端上连接有光照度传感器,所述主控制器MCU的补光拍摄端连接有补光摄像设备,所述主控制器MCU的图像处理端连接有图像处理模块,所述主控制器MCU的存储端上连接有存储器,所述主控制器MCU的通信端上连接有传输通信模块,该传输通信模块与所述图像处理模块连接,所述主控制器MCU的定位端上连接有定位模块,所述主控制器MCU的倾倒检测端上连接有倾倒传感器,所述主控制器MCU的振动检测端上连接有振动传感器,所述主控制器MCU的内部环境检测端上连接有内环境传感器,所述主控制器MCU供电端上连接有自供电模块。
通过上述设计,采用铝合金材质的外壳,外壳防护等级为IP67,内部腔体充惰性气体。并且设计使用了自供电模块,进行室外充电和供电,延长装置使用寿命。采用第一鉴别传感器、第二鉴别传感器相结合的双鉴别传感器。在没有摄取到动物画面时,使整个装置处于低功耗状态,并且只采用第一鉴别传感器进行监测的,并且采用远距离红外采集设备进行采集,提高监测摄取距离,在摄取到有红外信号后,在使整个系统退出低功耗状态启动第二鉴别传感器进行动物热成像温度图片采集,并结合采光和补光技术摄取效果更好的彩色图片。利用微功耗技术和多模态能耗状态机模型,实现整机微功耗工作和精准的能耗状态控制。在主控制器上连接倾倒传感器、振动传感器、定位模块,有效防止装置被移动、偷盗等,提高装置安全性能,实现自报警处理。通过多种传感器的集成和设计,实现基于物联网的野生动物抓拍,提高抓拍效果。
进一步的,所述第一鉴别传感器包括红外传感器,该红外传感器为双红外热释电敏感元件反向串联形成,所述壳体上开设有第一鉴别孔,该第一鉴别孔上设置有菲涅尔透镜,所述红外传感器的红外采集端正对所述菲涅尔透镜,所述红外传感器与红外传感器驱动电路输入端连接,该红外传感器驱动电路输出端输出的红外波形信号与所述主控制器MCU的聚焦红外采集端连接;
所述第二鉴别传感器包括红外阵列传感器,所述铝合金壳体上开设有第二鉴别孔,该第二鉴别孔内设置有红外透镜,所述红外阵列传感器的红外采集端正对所述红外透镜,所述红外阵列传感器的温度信号与所述主控制器MCU的聚焦红外采集端连接。
采用上述方案,第一鉴别传感器的菲涅尔透镜和红外传感器红外采集端的中心位于同一水平线,形成远距离红外脉冲效应,以进一步的增加识别距离;其中设置红外传感器的波长为9-12um,设置特定波长,针对动物体辐射的红外波长敏感,且反向串联封装双元素,进一步提高灵敏度,该第一鉴别传感器为整个装置识别触发的第一触发源,用于启动第二鉴别传感器。第二鉴别传感器的红外透镜通过特殊稀土材料制备,特定通过红外波段光线。同时通过光学聚焦原理,可将更多红外光线汇聚于后端传感器之上,以提高识别距离。红外阵列传感器输出红外热成像图像。
再进一步的技术方案为:所述传输通信模块包括移动通信单元和近距离无线传输单元,所述近距离无线传输单元为蓝牙传输单元或者WiFi传输单元;
所述自供电模块包括太阳能电池板,该太阳能电池板连接有能量收集与转化电路,该能量收集与转化电路经三级储能器向所述主控制器MCU供电。
通过移动通信单元实现远距离数据传输至指定云平台,通过蓝牙传输单元或者WiFi传输单元实现近距离传输。在不使用的情况下,传输通信模块处于不工作状态,在主控制器MCU内设置运行周期,实现周期性的运行。装置设置在野外,通过太阳能电池板进行自充电,能源自给。实现野外环境长生命周期的自主供能,在装置生命周期内不需要更换电池。
再进一步的描述,所述内环境传感器包括电流电压检测模块、温度检测模块、湿度检测模块、气压检测模块,所述电流电压检测模块、温度检测模块、湿度检测模块、气压检测模块均与所述主控制器MCU连接。
为了对设备进行检测、监测和自诊断,设置电流电压检测模块、温度检测模块、湿度检测模块、气压检测模块,实现无人看管和快速报警。
一种基于物联网的自适应低功耗野生动物抓拍装置的方法,其特征在于包括以下步骤:
用于进行鉴别、判定、抓拍的步骤;
用于无线传输图片的步骤;
用于定时上传抓拍系统工作状态的步骤;
用于倾倒与防盗监测的步骤。
进一步的,用于进行鉴别、判定、抓拍的步骤为:
预处理:设定红外波形离散系数阈值U和环境光照度
S11:主控制器MCU处于低功耗状态,并控制第一鉴别传感器实时获取红外波形信号,当主控制器MCU获取到红外波形信号u(t)后进入步骤S12;
S12:主控制器MCU退出低功耗状态,并对获取到的红外波形信号u(t)进行数据处理、帧间差分处理、特征量提取,得到红外波形离散系数u1(t);
S13:主控制器MCU比较两次红外波形离散系数u1(t)与红外波形离散系数阈值U;若两次红外波形离散系数u1(t)均大于等于红外波形离散系数阈值n,则进入步骤S14;否则,返回步骤S11,进入低功耗状态;
S14:主控制器MCU启动第二鉴别传感器,并连续获取至少三个第二鉴别传感器采集的温度信号,形成热成像图像,建立红外阵列温度图片,进行帧间差分分析;
S15:主控制器MCU结合图像处理模块进行人工智能动物模式识别,得出动物判定结果;若为动物,则进入步骤S16,否则返回步骤S11;
S16:主控制器MCU启动光照度传感器,并获取当前环境光照度;
S17:若当前环境光照度低于预设环境光照度,则主控制器MCU启动补光摄像设备进行补光、拍摄得到彩色图片RGB,并保存至存储器;否则主控制器MCU启动补光摄像设备进行拍摄并保存至存储器。
利用点型非致冷热释电红外传感器和阵列型非致冷热释电红外传感器组成双鉴技术检测动物热体红外,实现低功耗检测,延长使用周期。
再进一步的,步骤S12得到的红外波形离散系数u1(t)所携带的频谱信息为一个特定的频谱范围;
将u1(t)进行傅立叶变换FFT,通过
根据经验公式与试验数据,取频率f在(1,10)离散点的幅度,进行差分对比:
设第一次采样结果在频率范围1~10中的a处取得最大值m1,即:在f
设第二次采样结果在频率范围a~10中的b处取得最大值m2,即:在f
若m
再进一步的,所述红外阵列温度图片尺寸为128*128;所述彩色图片RGB为X*Y;
步骤S15中具体步骤为:
S151:将红外阵列温度图片、彩色图片RGB压缩合并,形成合并图片数据Input,具体内容为:根据红外阵列温度图片的尺寸,将彩色图片RGB尺寸映射成为3通道的128*128的调整图片数据;根据所述红外阵列温度图片得到1通道128*128的红外温度数据;将所述调整图片数据和所述红外温度数据压缩合并,形成4通道、128*128的合并图片数据Input;
S152:将步骤S1得到的合并图片数据Input送入数据卷积网络结构进行处理后,得到输出图片数据Output;
将合并图片数据Input送入数据卷积网络结构进行处理的具体步骤为:
S1521:设置第一卷积核组,该第一卷积核组包括16个的1*1卷积核Filter1X,X=1,2,3…16;每个卷积核Filter1 X通道数均为4,步长设置为4;
将所述合并图片数据Input和16个卷积核Filter1 X做组卷积运算,得到组卷积输出数据M1,具体为:
所述合并图片数据Input和第一卷积核组中的所有卷积核Filter1 X各有4个通道,将合并图片数据Input和每个卷积核Filter1 X的四个通道依次相乘并相加后得到第一次中间数据,第一次中间数据代入h-swish函数,计算得到16通道N*N的第一次卷积输出数据M1;
在S1521中,增加了通道数,使得原始合并图片数据Input中潜藏的特征升维到了一个更高维的空间,然后通过使用h-swish函数增加了非线性表达能力。
S1522:设置第二卷积核组,该第二卷积核组包括1个的4*4卷积核Filter2,每个第二卷积核Filter2通道数均为4,步长设置为4;
将第一次卷积输出数据M1与卷积核Filter2做常规卷积运算,得到常规卷积输出数据M2;具体为:
第一次卷积输出数据M1有16个通道,现在将其分成4个组,每组4个通道;取其中4组分别与卷积核Filter2做卷积运算并合并得4通道32*32的第二次中间数据,再代入h-swish函数得到第二次卷积输出数据M2;
步骤S1522中,将第一次卷积输出数据M1分成4个组,每组依次与卷积核Filter2做卷积运算。与Filter1不同,Filter2只有一个卷积核,所以第一次卷积输出数据M1分的4个组共用卷积核Filter2的一个卷积核(即为共享卷积核权重)。这样的操作极大的减少了计算过程中消耗的时间和内存。
S1523:设置第三卷积核组,该第三卷积核组包括1个的4*4卷积核Filter3,卷积核Filter3通道数均为4,步长设置为4;
将第二次卷积输出数据M2与卷积核Filter3做第三次卷积运算,得到第三次卷积输出数据M3;具体为:
第二次卷积输出数据M2是4通道32*32数据,卷积核Filter3是4通道数据,每个通道分别卷积,得到结果是4个8*8的第三次中间数据,然后4个中间数据相加得到1通道8*8数据,代入经过h-swish函数得到第三次卷积输出数据M3;
S1524:设置第四卷积核组,该第四卷积核组包括1个通道数为1的8*8卷积核Filter4;
将第三次卷积输出数据M3与卷积核Filter4做卷积运算后得到第四次中间数据,第四次中间数据代入tanh函数,得到合并图片数据Input;
其中,h-swish函数为:
x为第一次中间数据或者第二次中间数据或者第三次中间数据;
tanh函数为:
y为第四次中间数据。
S153:设定判断阈值,根据输出图片数据Output的取值,判定是否有动物;
设定判断阈值为范围是(-1,1),所述合并图片数据Input的值越趋近1,表示越确定图片中含有动物;所述合并图片数据Input的值越趋近-1,表示越确定图片不含有动物。
该数据卷积网络结构的特点是采用组卷积和共享权重使得参数量少,在进行图片识别是可以远程与云平台连接进行数据交互,耗电量少,速度快。
再进一步的技术方案为:用于无线传输图片的步骤中包括用于近距离无线传输图片的步骤和用于远距离无线传输图片的步骤;
其中,所述用于近距离无线传输图片的步骤为:
S21:主控制器MCU处于低功耗状态,实时获取传输通信模块近距离无线传输配对请求;
S22:主控制器MCU获取到任一智能终端的近距离无线传输配对请求时,退出低功耗状态,与对应智能终端进行近距离无线传输配对连接;
S23:主控制器MCU获取智能终端数据传输请求,并预测数据传输时间;
S24:主控制器MCU获取当前自供电模块数据传输续航时间;
S25:若数据传输续航时间大于预测数据传输时间,进行数据传输;否则拒绝数据传输请求,进入低功耗状态;
所述用于远距离无线传输图片的步骤为:
预处理:设置远距离无线传输图片周期;
S31:主控制器MCU处于低功耗状态,并周期性获取当前移动信号覆盖状态;
S32:若处于移动信号覆盖状态,进入步骤S33;否则返回步骤S31;
S33:主控制器MCU退出低功耗状态,经传输通信模块向云平台传输拍摄数据;传输完毕后返回步骤S31。
再进一步的技术方案为:为了进行监测和防盗,所述用于倾倒与防盗监测的步骤为:
S41:主控制器MCU处于低功耗状态,并实时获取倾倒传感器的倾倒检测信号,当获取倾倒检测信号后,退出低功耗状态,进入步骤S42;
S42:主控制器MCU启动传输通信模块中的移动通信单元和振动传感器;
S43:主控制器MCU经所述移动通信单元向云平台发出倾倒报警信号;同时获取振动传感器检测的振动信号;
S44:主控制器MCU比较预设偷盗振动信号和检测到的振动信号,若相似度大于预设偷盗相似度阈值,则进入步骤S45;否则,进入低功耗状态,返回步骤S41;
S45:主控制器MCU控制启动定位模块,并将当前所在位置发送至云平台。
本发明的有益效果:利用太阳能供电、多级储能和后备供电技术,实现野外环境长生命周期的自主供能,在装置生命周期内不需要更换电池。利用微功耗技术和多模态能耗状态机模型,实现整机微功耗工作和精准的能耗状态控制。利用点型非致冷热释电红外传感器和阵列型非致冷热释电红外传感器组成双鉴技术检测动物热体红外。结合识别算法,对获取到的图片进行识别判断,用于进行图片筛查,降低内存占用量,可以保存更多有用的数据和图片。缩短工作人员筛查时间。提高对野外动物的监管效率。并且利用倾倒、振动传感器进行装置移动和被盗监控,并结合定位传感器进行实时位置获取,利于防盗和找回。利用铝合金外壳设计,防护等级达到IP67。利用电流、电压、温度、湿度、气压等传感器监测及诊断装置各单元电路工作状态,支持远程参数测控。
附图说明
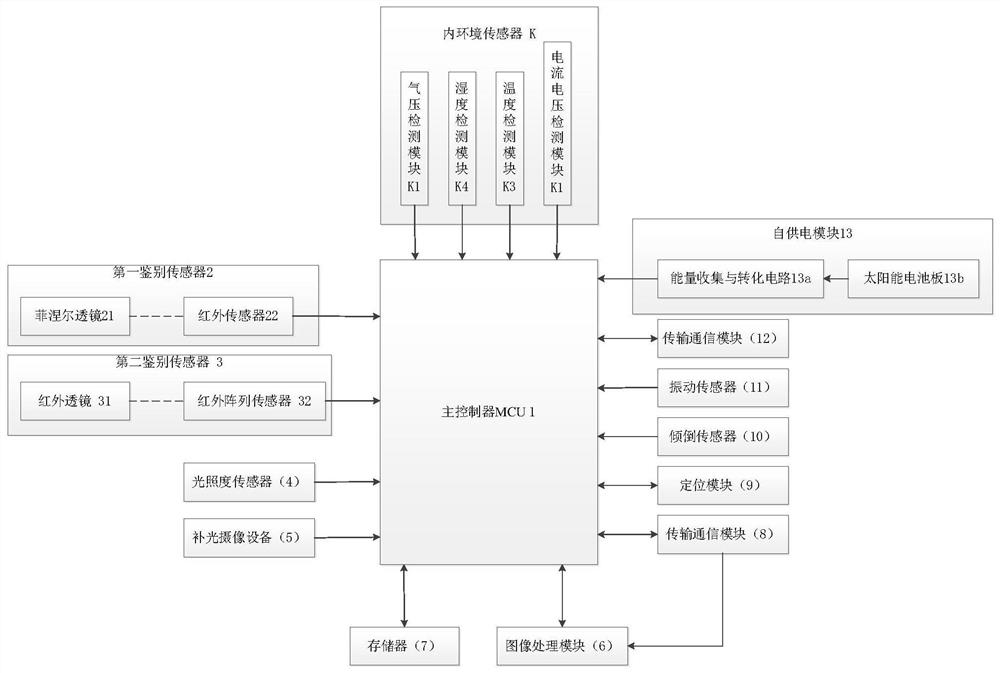
图1是本发明的控制框图;
图2是进行鉴别、判定、抓拍的流程图;
图3是人工智能动物模式识别流程图;
图4是用于近距离无线传输图片流程图;
图5是用于远距离无线传输图片流程图;
图6是用于倾倒与防盗监测的流程图。
具体实施方式
下面结合附图对本发明的具体实施方式以及工作原理作进一步详细说明。
一种基于物联网的自适应低功耗野生动物抓拍装置,包括铝合金壳体,该铝合金壳体内设置有主控制器MCU1,从图1可以看出,该主控制器MCU1的远距离红外采集端连接有第一鉴别传感器2,所述主控制器MCU1的聚焦红外采集端上连接有第二鉴别传感器3,所述主控制器MCU1的光采集端上连接有光照度传感器4,所述主控制器MCU1的补光拍摄端连接有补光摄像设备5,所述主控制器MCU1的图像处理端连接有图像处理模块6,所述主控制器MCU1的存储端上连接有存储器7,所述主控制器MCU1的通信端上连接有传输通信模块12,该传输通信模块12与所述图像处理模块6连接,所述主控制器MCU1的定位端上连接有定位模块9,所述主控制器MCU1的倾倒检测端上连接有倾倒传感器10,所述主控制器MCU1的振动检测端上连接有振动传感器11,所述主控制器MCU1的内部环境检测端上连接有内环境传感器K,所述主控制器MCU1供电端上连接有自供电模块13。
在本实施例中,主控制器MCU1采用内核为ARM Cortex-M4,带FPU浮点运算单元的超低功耗微处理器,其可实现<500nA超低待机运行功耗。通过算法、数据交互实现装置各项功能的控制。
在本实施例中,补光摄像设备5采用1200万像素的可见光传感器,支持至少1080P图像与视频的拍摄。
结合图1还可以看出,所述第一鉴别传感器2包括红外传感器22,该红外传感器为双红外热释电敏感元件反向串联形成,所述壳体上开设有第一鉴别孔,该第一鉴别孔上设置有菲涅尔透镜21,所述红外传感器22的红外采集端正对所述菲涅尔透镜21,所述红外传感器22与红外传感器驱动电路输入端连接,该红外传感器驱动电路输出端输出的红外波形信号与所述主控制器MCU1的聚焦红外采集端连接;
在本实施例中,红外传感器22波长9~12um,敏感度>4000V/W,视场角>100°。
所述第二鉴别传感器3包括红外阵列传感器32,所述铝合金壳体上开设有第二鉴别孔,该第二鉴别孔内设置有红外透镜31,所述红外阵列传感器32的红外采集端正对所述红外透镜31,所述红外阵列传感器32的温度信号与所述主控制器MCU1的聚焦红外采集端连接。
在本实施例中,第二鉴别传感器3中,红外阵列传感器32的像素点阵≥128*128。
在本实施例中,所述传输通信模块12包括移动通信单元和近距离无线传输单元,所述近距离无线传输单元为WiFi传输单元;在本实施例中,该WiFi传输单元可提供最大150Mbit/s的传输速率。
在本实施例中,移动通信单元可以是4G/5G/6G等。
结合图1还可以看出,所述自供电模块13包括太阳能电池板13b,该太阳能电池板13b连接有能量收集与转化电路13a,该能量收集与转化电路13a经三级储能器向所述主控制器MCU1供电。
太阳能电池板13b采用双A级单晶硅高效率太阳能电池板,配合低光照电荷泵技术与MPPT追踪技术,实现>500lux光照下稳定储能。
结合图1可以看出,所述内环境传感器K包括电流电压检测模块K1、温度检测模块K2、湿度检测模块K3、气压检测模块K4,所述电流电压检测模块K1、温度检测模块K2、湿度检测模块K3、气压检测模块K4均与所述主控制器MCU1连接。
一种基于物联网的自适应低功耗野生动物抓拍装置的方法,其特征在于包括以下步骤:
用于进行鉴别、判定、抓拍的步骤;
用于无线传输图片的步骤;
用于定时上传抓拍系统工作状态的步骤;
用于倾倒与防盗监测的步骤。
结合图2可以看出,用于进行鉴别、判定、抓拍的步骤为:
预处理:设定红外波形离散系数阈值U和环境光照度
S11:主控制器MCU1处于低功耗状态,并控制第一鉴别传感器2实时获取红外波形信号,当主控制器MCU1获取到红外波形信号u(t)后进入步骤S12;
S12:主控制器MCU1退出低功耗状态,并对获取到的红外波形信号u(t)进行数据处理、帧间差分处理、特征量提取,得到红外波形离散系数u1(t);
S13:主控制器MCU1比较两次红外波形离散系数u1(t)与红外波形离散系数阈值U;若两次红外波形离散系数u1(t)均大于等于红外波形离散系数阈值n,则进入步骤S14;否则,返回步骤S11,进入低功耗状态;
S14:主控制器MCU1启动第二鉴别传感器3,并连续获取至少三个第二鉴别传感器3采集的温度信号,形成热成像图像,建立红外阵列温度图片,进行帧间差分分析;
S15:主控制器MCU1结合图像处理模块6进行人工智能动物模式识别,得出动物判定结果;若为动物,则进入步骤S16,否则返回步骤S11;
S16:主控制器MCU1启动光照度传感器4,并获取当前环境光照度;
S17:若当前环境光照度低于预设环境光照度,则主控制器MCU1启动补光摄像设备5进行补光、拍摄得到彩色图片RGB,并保存至存储器7;否则主控制器MCU1启动补光摄像设备5进行拍摄并保存至存储器7。
在本实施例中,步骤S12得到的红外波形离散系数u1(t)所携带的频谱信息为一个特定的频谱范围;
将u1(t)进行傅立叶变换FFT,通过
根据经验公式与试验数据,取频率f在(1,10)离散点的幅度,进行差分对比:
设第一次采样结果在频率范围1~10中的a处取得最大值m1,即:在f
设第二次采样结果在频率范围a~10中的b处取得最大值m2,即:在f
若m
在本实施例中,所述红外阵列温度图片尺寸为128*128;所述彩色图片RGB为X*Y;
结合图3可以看出,步骤S15中具体步骤为:
S151:将红外阵列温度图片、彩色图片RGB压缩合并,形成合并图片数据Input,具体内容为:根据红外阵列温度图片的尺寸,将彩色图片RGB尺寸映射成为3通道的128*128的调整图片数据;根据所述红外阵列温度图片得到1通道128*128的红外温度数据;将所述调整图片数据和所述红外温度数据压缩合并,形成4通道、128*128的合并图片数据Input;
S152:将步骤S1得到的合并图片数据Input送入数据卷积网络结构进行处理后,得到输出图片数据Output;
将合并图片数据Input送入数据卷积网络结构进行处理的具体步骤为:
S1521:设置第一卷积核组,该第一卷积核组包括16个的1*1卷积核Filter1X,X=1,2,3…16;每个卷积核Filter1 X通道数均为4,步长设置为4;
将所述合并图片数据Input和16个卷积核Filter1 X做组卷积运算,得到组卷积输出数据M1,具体为:
所述合并图片数据Input和第一卷积核组中的所有卷积核Filter1 X各有4个通道,将合并图片数据Input和每个卷积核Filter1 X的四个通道依次相乘并相加后得到第一次中间数据,第一次中间数据代入h-swish函数,计算得到16通道N*N的第一次卷积输出数据M1;
S1522:设置第二卷积核组,该第二卷积核组包括1个的4*4卷积核Filter2,每个第二卷积核Filter2通道数均为4,步长设置为4;
将第一次卷积输出数据M1与卷积核Filter2做常规卷积运算,得到常规卷积输出数据M2;具体为:
第一次卷积输出数据M1M1有16个通道,现在将其分成4个组,每组4个通道;取其中4组分别与卷积核Filter2做卷积运算并合并得4通道32*32的第二次中间数据,再代入h-swish函数得到第二次卷积输出数据M2;
S1523:设置第三卷积核组,该第三卷积核组包括1个的4*4卷积核Filter3,卷积核Filter3通道数均为4,步长设置为4;
将第二次卷积输出数据M2与卷积核Filter3做第三次卷积运算,得到第三次卷积输出数据M3;具体为:
第二次卷积输出数据M2是4通道32*32数据,卷积核Filter3是4通道数据,每个通道分别卷积,得到结果是4个8*8的第三次中间数据,然后4个中间数据相加得到1通道8*8数据,代入经过h-swish函数得到第三次卷积输出数据M3;
S1524:设置第四卷积核组,该第四卷积核组包括1个通道数为1的8*8卷积核Filter4;
将第三次卷积输出数据M3与卷积核Filter4做卷积运算后得到第四次中间数据,第四次中间数据代入tanh函数,得到合并图片数据Input;
其中,h-swish函数为:
x为第一次中间数据或者第二次中间数据或者第三次中间数据;
tanh函数为:
y为第四次中间数据。
S153:设定判断阈值,根据输出图片数据Output的取值,判定是否有动物;
设定判断阈值为范围是(-1,1),所述合并图片数据Input的值越趋近1,表示越确定图片中含有动物;所述合并图片数据Input的值越趋近-1,表示越确定图片不含有动物。
用于无线传输图片的步骤中包括用于近距离无线传输图片的步骤和用于远距离无线传输图片的步骤;
其中,结合图4可以看出,所述用于近距离无线传输图片的步骤为:
S21:主控制器MCU1处于低功耗状态,实时获取传输通信模块12近距离无线传输配对请求;
S22:主控制器MCU1获取到任一智能终端的近距离无线传输配对请求时,退出低功耗状态,与对应智能终端进行近距离无线传输配对连接;
S23:主控制器MCU1获取智能终端数据传输请求,并预测数据传输时间;
S24:主控制器MCU1获取当前自供电模块13数据传输续航时间;
S25:若数据传输续航时间大于预测数据传输时间,进行数据传输;否则拒绝数据传输请求,进入低功耗状态;
结合图5可以看出,所述用于远距离无线传输图片的步骤为:
预处理:设置远距离无线传输图片周期;
S31:主控制器MCU1处于低功耗状态,并周期性获取当前移动信号覆盖状态;
S32:若处于移动信号覆盖状态,进入步骤S33;否则返回步骤S31;
S33:主控制器MCU1退出低功耗状态,经传输通信模块12向云平台传输拍摄数据;传输完毕后返回步骤S31。
结合图6可以看出,所述用于倾倒与防盗监测的步骤为:
S41:主控制器MCU1处于低功耗状态,并实时获取倾倒传感器10的倾倒检测信号,当获取倾倒检测信号后,退出低功耗状态,进入步骤S42;
S42:主控制器MCU1启动传输通信模块12中的移动通信单元和振动传感器11;
S43:主控制器MCU1经所述移动通信单元向云平台发出倾倒报警信号;同时获取振动传感器11检测的振动信号;
S44:主控制器MCU1比较预设偷盗振动信号和检测到的振动信号,若相似度大于预设偷盗相似度阈值,则进入步骤S45;否则,进入低功耗状态,返回步骤S41;
S45:主控制器MCU1控制启动定位模块9,并将当前所在位置发送至云平台。
应当指出的是,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改性、添加或替换,也应属于本发明的保护范围。
- 基于物联网的自适应低功耗野生动物抓拍装置及方法
- 基于物联网的自适应低功耗野生动物抓拍装置及方法