一种摆角铣头装配序列规划演示系统及方法
文献发布时间:2023-06-19 09:33:52
技术领域
本发明属于装配序列规划领域,具体设计一种摆角铣头装配序列规划演示系统及使用方法。
背景技术
随着时代的发展,科技的进步,制造业在国民经济中所占的分量越来越重,而装配是产品生产制造过程中必不可缺少的一步,装配规划的最终目的是确定产品装配计划,装配规划问题的核心目标是装配序列规划,其属于组合优化问题,本质是为了获得产品的最优装配序列。因此减少装配所费时间、减轻装配过程难度,是降低产品生产制造成本,提高企业社会竞争力的有力方式。
摆角铣头作为多轴联动机床的核心部件,其装配过程占据着非常重要的地位。目前由于其复杂结构依然存在着大量人工求解装配序列的现象,很大程度上依赖装配工人的主观经验,并且对于想观察学习装配过程的学者来说,只能从录像或者其他讲解视频了解学习,无法身临其境去感受学习。
发明内容
本发明针对上述现有技术中存在的不足与问题,提供了一种摆角铣头装配序列规划演示系统及使用方法。
本发明所提出的一种摆角铣头装配序列规划演示系统,包括摆角铣头零部件信息模块、摆角铣头装配序列规划模块、摆角铣头虚拟装配仿真及体验模块;
摆角铣头零部件信息模块包含摆角铣头零部件三维模型信息与摆角铣头零部件装配信息,其中摆角铣头零部件三维模型信息主要包含摆角铣头各个零部件三维模型;摆角铣头零部件装配信息包括零部件装配方向信息、零部件装配工具信息、零部件装配干涉信息、零部件装配连接信息、零部件装配支撑信息。零部件装配方向信息主要包含摆角铣头零部件在装配过程中所沿装配方向信息;零部件装配工具信息主要包含摆角铣头零部件在装配工程中所用装配工具信息;零部件干涉信息主要包含摆角铣头零部件在某一方向上进行装配时与其他零件的装配干涉信息;零部件装配连接信息主要包含摆角铣头各个零部件之间的连接关系信息;零部件装配支撑信息主要包含摆角铣头各个零部件之间支撑关系信息;
摆角铣头装配序列规划模块包含摆角铣头装配信息矩阵与摆角铣头装配序列规划,其中摆角铣头装配信息矩阵用于将摆角铣头零部件装配信息转化为编程语言可识别的信息矩阵形式存储并用于装配序列规划;摆角铣头装配序列规划用于将摆角铣头装配序列通过遗传粒子群混合算法实现迭代寻优,并将最优装配序列存储。
摆角铣头虚拟装配仿真及体验模块包含摆角铣头虚拟装配仿真与用户VR体验,其中,摆角铣头虚拟装配仿真用于按照装配序列仿真模块所存储的装配最优序列对摆角铣头零部件进行装配过程仿真演示;用户VR体验用于将摆角铣头虚拟装配仿真过程与所存储摆角铣头最优装配序列呈现于虚拟环境,让用户对摆角铣头装配过程获得更深层次的理解。
本发明所提出的一种摆角铣头装配序列规划演示系统使用方法,具体按照以下要求实施:
要求1)将摆角铣头零部件三维模型与装配信息存储到零部件装配信息模块中:
要求1.1)将摆角铣头零部件三维模型信息存储到零部件三维模型信息库;
要求1.2)将摆角铣头零部件装配过程所沿方向信息存储到零部件装配方向信息库;
要求1.3)将摆角铣头零部件装配过程所用装配工具信息存储到零部件装配工具信息库;
要求1.4)将摆角铣头零部件沿某一方向进行装配时与其他零件的装配干涉信息存储到零部件装配干涉信息库;
要求1.5)将摆角铣头零部件之间连接关系信息存储到零部件装配连接信息库;
要求1.6)将摆角铣头零部件之间支撑关系信息存储到零部件装配支撑信息库;
要求2)将零部件信息模块中摆角铣头零部件三维模型及其对应索引号转存至虚拟装配仿真及体验模块;
要求3)将零部件信息模块中摆角铣头零部件三维模型对应索引号与由装配信息转换的编程语言可识别的标准矩阵格式一并存储到装配序列规划模块;
要求4)根据摆角铣头零部件装配信息矩阵使用遗传粒子群混合算法进行摆角铣头零部件装配序列的寻优规划;
要求4.1)粒子群算法重定义,对粒子群算法中粒子进行重新定义,每个粒子代表了存储在其中的装配序列;粒子i的位置向量P
要求4.2)建立遗传粒子群混合算法适应度函数,定义装配干涉次数ng、不稳定支撑次数ns、装配工具变换次数nt、装配方向变换次数nd、不稳定连接次数nc为影响装配总时长根本因素。n代表实现装配流程中各种变更次数,u代表总的装配时间中各种次数所占权重,且u
要求4.3)设置粒子种群数量m,最大迭代次数t
要求4.4)与个体最优装配序列交叉更新,在[1,n]中随机生成两个值a1与a2产生一个交叉位,提取出个体最优序列中a1到a2序列形成交叉区域矩阵并将其放置在序列前端,重新计算序列适应度值并于交叉更新前适应度值比较,若更优则更新个体最优装配序列;
要求4.5)与全局最优装配序列交叉更新,在[1,n]中随机生成两个值b1与b2产生一个交叉位,提取出全局最优序列中b1到b2序列形成交叉区域矩阵并将其放置在序列前端,重新计算序列适应度值并于交叉更新前适应度值比较,若更优则更新全局最优装配序列;
要求4.6)变异更新,在[1,n]中随机生成两个值c1与c2,将序列中c1与c2对应零部件编号对换形成新的装配序列,重新计算装配序列适应度值并与更新前适应度值比较,若更优则更新最优装配序列;
要求4.7)完成交叉变异更新后比较所有个体适应度值,选取最小个体适应度值与全局最小适应度值比较,若更小则更新全局最优装配序列;
要求4.8)判断迭代次数t是否达到最大迭代次数t
要求5)将摆角铣头零部件三维模型按照要求4所得到的全局最优装配序列进行虚拟装配仿真并载入到VR虚拟环境供用户体验;
要求5.1)根据要求2获得的摆角铣头零部件三维模型及其索引号按照要求4所获得的全局最优装配序列进行虚拟装配仿真,实现对该装配序列的可行性验证;
要求5.2)将虚拟装配仿真过程与最优装配序列上传载入到VR虚拟环境供用户进行更深层次的体验。
本发明所提出的一种摆角铣头装配序列规划演示系统使用方法,其特点还在于:
摆角铣头装配信息矩阵包括装配方向矩阵、装配工具矩阵、装配干涉矩阵、装配连接矩阵、装配支撑矩阵;
适应度函数值越小则所代表的装配序列越优。
本发明的有益效果是:
本发明所提出的一种摆角铣头装配序列规划演示系统,由摆角铣头三维模型的输入到装配矩阵信息的转换,对零部件装配序列进行迭代寻优并最终将虚拟装配过程呈现在VR虚拟环境中供用户对摆角铣头装配过程进行更深层次的了解学习。
本发明提供的一种摆角铣头装配序列规划演示系统使用方法,利用遗传粒子群混合算法对摆角铣头零部件装配序列进行迭代寻优,提供了算法适应度函数惯性权重的自定义输入,减缓了目前摆角铣头装配大程度依赖装配工人主观经验的情况,为未来复杂装配体装配规划提供了思路,并且利用了虚拟仿真的新型呈现形式。
附图说明
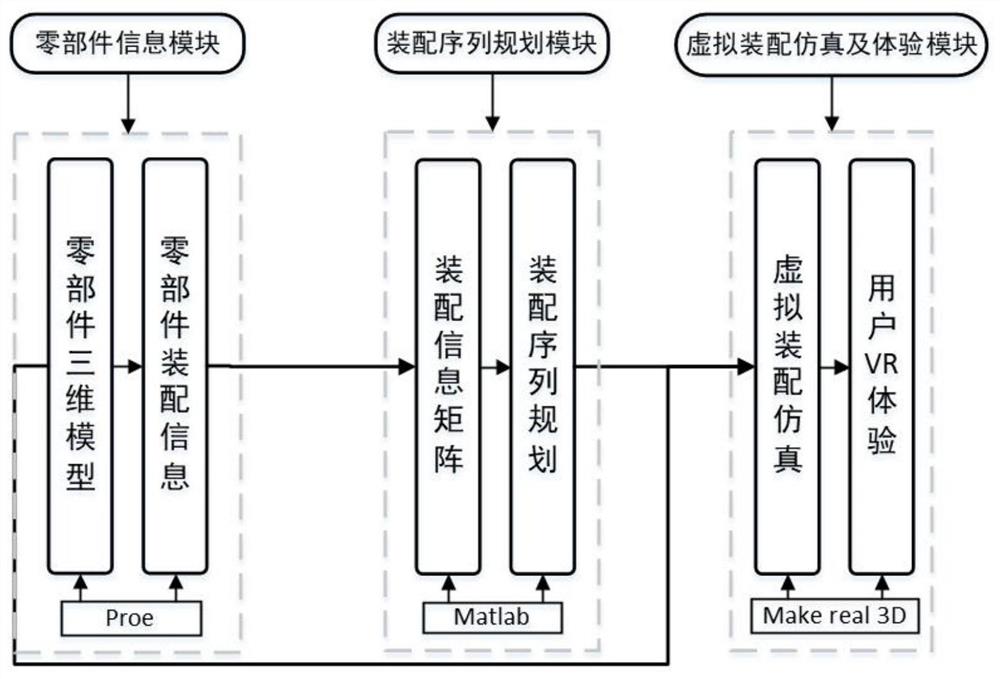
图1为本发明一种摆角铣头装配序列规划演示系统的结构示意图;
图2为本发明一种摆角铣头装配序列规划演示系统使用方法的流程图;
图3为本发明一种摆角铣头装配序列规划演示系统使用方法中遗传粒子群混合算法实现流程图;
具体实施方式
下面结合附图对本发明进行详细说明。
本发明一种摆角铣头装配序列规划演示系统,其结构示意图如图1所示,包括摆角铣头零部件信息模块、摆角铣头装配序列规划模块、摆角铣头虚拟装配仿真及体验模块。
摆角铣头零部件信息模块包含零部件三维模型信息与零部件装配信息,其中零部件三维模型信息主要包含摆角铣头各个零部件三维模型;零部件装配信息包括零部件装配方向信息、零部件装配工具信息、零部件装配干涉信息、零部件装配连接信息、零部件装配支撑信息。零部件装配方向信息主要包含摆角铣头零部件在装配过程中所沿装配方向信息;零部件装配工具信息主要包含摆角铣头零部件在装配工程中所用装配工具信息;零部件干涉信息主要包含摆角铣头零部件在某一方向上进行装配时与其他零件的装配干涉信息;零部件装配连接信息主要包含摆角铣头各个零部件之间的连接关系信息;零部件装配支撑信息主要包含摆角铣头各个零部件之间支撑关系信息;
摆角铣头装配序列规划模块包含摆角铣头装配信息矩阵与摆角铣头装配序列规划,其中装配信息矩阵用于将摆角铣头零部件装配信息转化为编程语言可识别的信息矩阵形式存储并用于装配序列规划;装配序列规划用于将摆角铣头装配序列通过遗传粒子群混合算法实现迭代寻优,并将最优装配序列存储。
摆角铣头虚拟装配仿真及体验模块包含摆角铣头虚拟装配仿真与用户VR体验,其中,虚拟装配仿真用于按照装配序列仿真模块所存储的装配最优序列对摆角铣头零部件进行装配过程仿真演示;用户VR体验用于将虚拟装配仿真过程与所存储最优装配序列呈现于虚拟环境,让用户对摆角铣头装配过程获得更深层次的理解。
本发明的一种摆角铣头装配序列规划演示系统是基于Proe、Matlab以及MakeReal3D三款软件实现的,三款软件分别对应零部件信息模块、装配序列规划模块与虚拟装配仿真及体验模块,完成从摆角铣头零部件三维模型信息的输入到最优装配序列与虚拟装配仿真输出的过程实现。
本发明的一种摆角铣头装配序列规划演示系统使用方法,其流程图如图2所示,具体按照以下要求实现:
要求1)将摆角铣头零部件三维模型与装配信息存储到零部件装配信息模块中:
要求1.1)将摆角铣头零部件三维模型信息存储到零部件三维模型信息库;
要求1.2)将摆角铣头零部件装配过程所沿最优装配方向信息存储到零部件装配方向信息库;
要求1.3)将摆角铣头零部件装配过程所用装配工具信息存储到零部件装配工具信息库;
要求1.4)将摆角铣头零部件沿某一方向进行装配时与其他零件的装配干涉信息存储到零部件装配干涉信息库;
要求1.5)将摆角铣头零部件之间连接关系信息存储到零部件装配连接信息库;
要求1.6)将摆角铣头零部件之间支撑关系信息存储到零部件装配支撑信息库;
要求2)将零部件信息模块中摆角铣头零部件三维模型及其对应索引号转存至虚拟装配仿真及体验模块;
要求3)将零部件信息模块中摆角铣头零部件三维模型对应索引号与由装配信息转换的编程语言可识别的标准矩阵格式一并存储到装配序列规划模块;
要求3.1)摆角铣头装配信息转换的编程语言可识别的标准矩阵包括装配方向矩阵、装配工具矩阵、装配干涉矩阵、装配连接矩阵、装配支撑矩阵;
要求3.2)在装配过程中每个零件有其自身的装配方向,假设摆角铣头装配体共有n个零部件,选择一个方向作为零件的最优装配方向并建立装配方向矩阵D
要求3.3)在摆角铣头装配过程中,每一步操作对于不同的零件都有不同的装配工具,通过提前定义,每个零件在装配过程中固定一种装配工具,建立装配工具矩阵T
要求3.4)建立摆角铣头装配干涉矩阵M
要求3.5)建立摆角铣头装配连接矩阵L
要求3.6)建立摆角铣头装配支撑矩阵S
要求4)根据摆角铣头零部件装配信息矩阵使用遗传粒子群混合算法进行摆角铣头零部件装配序列的寻优规划,遗传粒子群混合算法实现流程图如图3所示;
要求4.1)粒子群算法重定义,对粒子群算法中粒子进行重新定义,每个粒子代表了存储在其中的装配序列;粒子i的位置向量P
要求4.2)建立遗传粒子群混合算法适应度函数,定义装配干涉次数ng、不稳定支撑次数ns、装配工具变换次数nt、装配方向变换次数nd、不稳定连接次数nc为影响装配总时长根本因素。n代表实现装配流程中各种变更次数,u代表总的装配时间中各种次数所占权重,且u
要求4.3)设置粒子种群数量m,最大迭代次数t
要求4.4)与个体最优装配序列交叉更新,在[1,n]中随机生成两个值a1与a2产生一个交叉位,提取出个体最优序列中a1到a2序列形成交叉区域矩阵,删除个体序列中与交叉区域矩阵重叠元素,并将剩余元素移动到底端,将交叉区域矩阵放置在个体序列前端,重新计算序列适应度值并于交叉更新前适应度值比较,若更优则更新个体最优装配序列;
要求4.5)与全局最优装配序列交叉更新,在[1,n]中随机生成两个值b1与b2产生一个交叉位,提取出全局最优序列中b1到b2序列形成交叉区域矩阵并将其放置在全局最优序列前端,重新计算序列适应度值并与交叉更新前适应度值比较,若更优则更新全局最优装配序列;
要求4.6)变异更新,在[1,n]中随机生成两个值c1与c2,将序列中c1与c2对应零部件编号对换形成新的装配序列,重新计算装配序列适应度值并与更新前适应度值比较,若更优则更新最优装配序列;
要求4.7)完成交叉变异更新后比较所有个体适应度值,选取最小个体适应度值与全局最小适应度值比较,若更小则更新全局最优装配序列;
要求4.8)判断迭代次数t是否达到最大迭代次数t
要求5)将摆角铣头零部件三维模型按照要求4所得到的全局最优装配序列进行虚拟装配仿真并载入到VR虚拟环境供用户体验;
要求5.1)根据要求2获得的摆角铣头零部件三维模型及其索引号按照要求4所获得的全局最优装配序列进行虚拟装配仿真,实现对该装配序列的可行性验证;
要求5.2)将摆角铣头零部件虚拟装配仿真过程与最优装配序列上传载入到VR虚拟环境供用户进行更深层次的体验。
- 一种摆角铣头装配序列规划演示系统及方法
- 一种数控摆角铣头专用的静态特性检测装置及测量方法