基于动态编组重构的道路自动驾驶车辆协同避障方法
文献发布时间:2023-06-19 09:36:59
技术领域
本发明涉及自动驾驶、道路车辆避障领域,具体涉及一种基于动态编组重构的道路自动驾驶车辆协同避障方法。
背景技术
自动驾驶已经在许多城市开始普及,随着计算及通信技术发展,未来自动驾驶车辆会拥有更灵敏的传感装置和更强的通信能力,这使得自动驾驶环境中的车辆可以对其他车辆信息有更多的了解。当交通事故发生在城市机动车道中,往往会阻碍后方车辆正常行驶,特别是在饱和度高的路段,自动驾驶车辆可以更精确地控制速度、转角,同时由于车车通信具备了一定的协同能力,相比于人工驾驶避障更容易形成车辆之间的协同,从而规避强行换道等产生的危险与附加延误。综上,对于自动驾驶环境下道路机动车道障碍物产生的安全问题,合理有效的多车辆协同避障方法显得十分关键。
避障问题也属于路径规划,而对于在自动驾驶场景下的道路交通,特别是自动驾驶车辆的避障,由于有了更多的环境信息,其更加偏向于全局路径规划,现有的如A
当自动驾驶环境中突发碰撞事故等阻碍交通的事件,对于事故所在路段和距离较近的连通路段来说,都需要对车辆避障进行快速处理,自动驾驶车辆之间的车车通信可以将障碍物信息更迅速且更广地传播,而道路范围中车辆躲避障碍物其实并非简单的避障问题,现有研究许多都针对相对封闭的环境和静态障碍物展开,而且任务往往比较单一,比如机器人避障问题;对于道路内某车道发生的事故,后方车辆想要避开就必须换道,而这种换道也不是现在诸多研究所针对的单车换道问题,因为在道路交通繁忙的城市,路段下游车辆往往已经形成了连续车流队列,因此与以往的研究不同,这是一种多车辆避障换道问题,其不仅要考虑静态障碍物位置、动态的碰撞轨迹还要考虑多车辆之间的配合、车道的选择,需要考虑更多的因素,如果从全局最优的角度考量这个问题将非常复杂,因为情景多样、参数众多。
发明内容
本发明的目的是针对上述不足,提出了一种能够适应车路协同环境下道路车辆避障,尤其是多车辆协同避障的基于动态编组重构的道路自动驾驶车辆协同避障方法。
本发明具体采用如下技术方案:
基于动态编组重构的道路自动驾驶车辆协同避障方法,包括以下步骤:
步骤1,由车车信息交互获取障碍物位置、形态信息和附近车辆尺寸、位置、速度信息;
步骤2,确认每辆自动驾驶车待定驶入的目标车道;
步骤3,确认每辆自动驾驶车目标驶入位置;
步骤4,根据优先目标车道后方来车位置信息,划分可能的优先换道车辆集合;
步骤5,判断与后方来车时空轨迹是否交叉以及队尾车辆需要具有的速度;
步骤6,根据速度及安全距离要求反向计算车辆速度,计算出需要达到的车速、确定避障车辆组成;
步骤7,完成避障。
优选地,步骤1中的车车信息交互是指在自动驾驶环境下,车辆操作和运行状态信息、道路环境感知信息(道路障碍物信息)通过通信网络在车辆与车辆之间传递。
优选地,步骤2的具体过程为:
场景是车道数为k的某段道路上,从里至外起分别记为1到k,其中某个或多个车道发生事故,则具体公式总结如式(1)所示:
L=(1,...,k)
S=(s
P=(p
p
其中,L表示车道数,总共k条车道,k≥2;S表示最基本的通行可能性,1表示可以通过车辆,0表示障碍使得道路无法通过;P是一个车道状态参数集合,其中每个车道状态参数的计算公式为p
优选地,步骤3中,选出步骤2所求优先目标车道为该车道的车辆,目标位置设定为目标车道平行于障碍物尾端的中心线位置和前方车辆尾端二者中更靠近本车的一个,即距离最近原则。
优选地,步骤4中,根据优先目标车道后方来车位置信息,划分可能的优先换道车辆集合。步骤2已经计算出了需要避障车辆在的避障车道优先级,而其中往往会出现多辆车连续驶入某一车道的情况,特别在自动驾驶背景下,道路通行效率得到了提升,针对于目标车道可驶入范围较大的情况,需要划分优先换道车辆集合。具体地,选出步骤2所求优先目标车道为该车道的车辆,进一步筛选出本车道车辆位置在首辆后方来车位置之前的车辆作为可能的优先换道车辆集合,并记录每辆车与目标车道首辆后方来车的纵向距离u。
优选地,步骤5中,判断与后方来车时空轨迹是否交叉以及队尾车辆需要具有的速度。当后方来车速度低于步骤3所得到的避障车队尾车速度时,可以直接按方案避障,然而当后方车辆速度较大时,需要确认是否能够安全避障,以及应该具备的速度。选取可能的优先换道车辆集合中最靠后的一辆车记为第h辆车,而目标车道最靠前的后方来车记为g车,计算h车如果保持本车车速到达目标点的时间记为t
优选地,步骤6中,根据v
优选地,步骤7中,根据确定的车辆组成、车速和目标位置,完成自动驾驶车辆避障。
本发明具有如下有益效果:
(1)本发明创新地将自动驾驶与道路交通中常见的交通障碍问题结合,很好地应用了自动驾驶环境下车车信息更好的交互,道路上游交通事故的播报使下游车辆可以提前获取障碍物信息,这使得自动驾驶车辆避障换道决策时间增长,有更大的编组避障空间;同时,目标点距离较远使得车辆轨迹偏角有效减小。
(2)对于目标换道车道,在当下较为常见的是前车驶入速度较慢迫使后车做出制动,而强行加塞的情况也经常发生,本发明基于两次对避障车辆集合的验证,可以保证在不影响后方车辆原来速度行驶的情况下完成避障,这对于后方车辆更加友好、安全。
(3)本发明考虑了连续避障车流组成的协同队列,通过计算可能的换道车辆编组集合,完成了动态编组重构,使原始队列变成了多个新的编组,满足多个时刻的避障,又通过引入避障队列中车辆速度差的方式对编组加以规定,较好规避了发生安全事故的可能,降低了计算难度;此外本发明所述步骤可以适应更多的车道数和更灵活的交通条件,具有较强的通用性。
附图说明
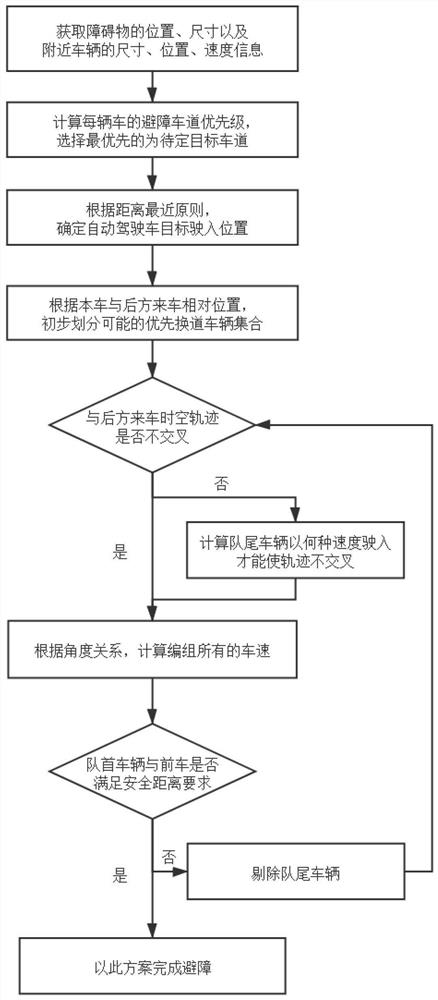
图1为基于动态编组重构的道路自动驾驶车辆协同避障方法流程框图;
图2为基于动态编组重构的道路自动驾驶车辆协同避障方法应用场景示意图。
具体实施方式
下面结合附图和具体实施例对本发明的具体实施方式做进一步说明:
结合图1基于动态编组重构的道路自动驾驶车辆协同避障方法,包括以下步骤:
步骤1,由车车信息交互获取障碍物位置、形态信息和附近车辆尺寸、位置、速度信息。其中车车信息交互是指在自动驾驶环境下,车辆操作和运行状态信息、道路环境感知信息(道路障碍物信息)通过通信网络在车辆与车辆之间传递。
步骤2,确认每辆自动驾驶车待定驶入的目标车道。
场景是车道数为k的某段道路上,从里至外起分别记为1到k,其中某个或多个车道发生事故,则具体公式可总结如下:
L=(1,...,k)
S=(s
P=(p
p
其中,L表示车道数,总共k条车道(k≥2,否则无法再向前行驶避障,只能等待疏散、掉头或者提前选择其他路径);S表示最基本的通行可能性,1表示可以通过车辆,0表示障碍使得道路无法通过;P是一个车道状态参数集合,其中每个车道状态参数的计算公式为p
步骤3,确认每辆自动驾驶车目标驶入位置。
目标位置设定为目标车道平行于障碍物尾端的中心线位置和前方车辆尾端二者中更靠近本车的一个,即距离最近原则。
步骤4,根据优先目标车道后方来车位置信息,划分可能的优先换道车辆集合。
步骤2已经计算出了需要避障车辆在的避障车道优先级,而其中往往会出现多辆车连续驶入某一车道的情况,特别在自动驾驶背景下,道路通行效率得到了提升,针对于目标车道可驶入范围较大的情况,需要划分优先换道车辆集合。具体地,选出步骤2所求优先目标车道为该车道的车辆,进一步筛选出本车道车辆位置在首辆后方来车位置之前的车辆作为可能的优先换道车辆集合,并记录每辆车与目标车道首辆后方来车的纵向距离u。
步骤5,判断与后方来车时空轨迹是否交叉以及队尾车辆需要具有的速度。
显然当后方来车速度低于步骤3所得到的避障车队尾车速度时,可以直接按方案避障,然而当后方车辆速度较大时,需要确认是否能够安全避障,以及应该具备的速度。选取可能的优先换道车辆集合中最靠后的一辆车记为第h辆车,而目标车道最靠前的后方来车记为g车,计算h车如果保持本车车速到达目标点的时间记为t
步骤6,根据速度及安全距离要求反向计算车辆速度,计算出需要达到的车速、确定避障车辆组成。
根据v
步骤7,完成避障。
结合图2,为一条3车道的城市道路,由里至外为1、2、3,车道宽3.75m,2车道发生交通事故,需要避障的车辆有3个,车头间距为10m,为此刻车速同为50km/h,1车道车速统一为70km/h,3车道65km/h。
由车车信息交互获取障碍物位置、形态信息和附近车辆尺寸、位置、速度信息。其中车车信息交互是指在自动驾驶环境下,车辆操作和运行状态信息、道路环境感知信息(道路障碍物信息)通过通信网络在车辆与车辆之间传递。
场景是车道数为k的某段道路上,从里至外起分别记为1到k,其中某个或多个车道发生事故,则具体公式可总结如下:
L=(1,…,k)
S=(s
P=(p
p
其中,总共3条车道;S表示最基本的通行可能性,1表示可以通过车辆,0表示障碍使得道路无法通过,为(1,0,1);P是一个车道状态参数集合,其中每个车道状态参数的计算公式为p
p
p
V=(200,0,300)
上述计算式代表了队首车辆得到的避障车道优先级,显然此车辆更应该选择3车道避障,分别计算得到后面两辆车最大V是450和600,其中第2辆车优先目标为第3车道,而第3辆车1、3车道优先级相同,因此都需要在步骤3中进行计算,1、3车道的目标位置为前车车尾和障碍物尾端平行位置,首辆车车头到这两个位置的距离都为10m。
根据优先目标车道后方来车位置和速度信息,划分可能的优先换道车辆集合。
步骤2已经计算出了需要避障车辆在的避障车道优先级,而其中往往会出现多辆车连续驶入某一车道的情况,特别在自动驾驶背景下,道路通行效率得到了提升,针对于目标车道可驶入范围较大的情况,需要划分优先换道车辆集合。具体地,选出步骤2所求优先目标车道为该车道的车辆,进一步筛选出本车道车辆车头位置在首辆后方来车位置之前的车辆作为可能的优先换道车辆集合,此时显然3辆车满足此要求。并记录每辆车与目标车道首辆后方来车的纵向距离u,其中u
判断与后方来车时空轨迹是否交叉以及队尾车辆需要具有的速度。
当后方来车速度低于步骤1所得到的避障车队尾车速度时,可以直接按方案避障,然而当后方车辆速度较大时,需要确认是否能够安全避障,以及应该具备的速度。
选取可能的优先换道车辆集合中最靠后的一辆车记为第h辆车,而目标车道最靠前的后方来车记为g车,计算h车如果保持本车车速到达目标点的时间记为t
此时对于第3辆车,需要分别计算到两个车道的情况。首先计算1车道,以本车道车辆不改变速度到达目标点时刻2.18s后为基准,此时l
根据速度及安全距离要求反向计算车辆速度,计算出需要达到的车速、确定避障车辆组成,完成避障。
根据v
此时3辆车全部目标为3车道,形成避障队列,此时h等于3,第三辆车车速为50km/h,第1、2、3辆车cosθ分别为0.94、0.98、0.99,根据纵向等速方程得到的v是50km/h、50.5km/h、53km/h,而第一辆车如果以这一速度行驶并在到达目标点时与前车的距离大于固定安全距离5m,因此确认采用此方案。
根据确定的车辆组成、车速和目标位置,完成自动驾驶车辆避障。
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
- 基于动态编组重构的道路自动驾驶车辆协同避障方法
- 基于动态编组重构的道路自动驾驶车辆协同避障方法