一种塑料粉碎塑料瓶切割装置
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及塑料粉碎技术领域,具体为一种塑料粉碎塑料瓶切割装置。
背景技术
塑料的主要成分是树脂。树脂是指尚未和各种添加剂混合的高分子化合物,树脂这一名词最初是由动植物分泌出的脂质而得名,如松香、虫胶等,树脂约占塑料总重量的40%~100%,塑料的基本性能主要决定于树脂的本性,但添加剂也起着重要作用。有些塑料基本上是由合成树脂所组成,不含或少含添加剂,如有机玻璃、聚苯乙烯等,随着塑料制品消费量不断增大,废弃塑料也不断增多,目前我国废弃塑料主要为塑料薄膜、塑料丝及编织品、泡沫塑料、塑料包装箱及容器、日用塑料制品、塑料袋和农用地膜等,另外,我国汽车用塑料年消费量已达40万吨,电子电器及家电配套用塑料年消费量已达100多万吨,这些产品报废后成了废塑料的重要来源之一,据了解,2004年国内废塑料已达约 1100万吨。这些废塑料的存放、运输、加工等待被加工的废弃塑料原料应用及后处理若不得当,势必会破坏环境,危害百姓健康;
现有技术领域内,塑料瓶粉碎前需要工作人员确认瓶内有无异物,若存在异物,需要工作人员手动对塑料瓶进行切割,操作较为麻烦,并且需要工作人员手动将切割后塑料瓶内的杂物取出,费时费力。
发明内容
本发明的目的在于提供一种塑料粉碎塑料瓶切割装置,以至少解决现有技术的塑料瓶粉碎前需要工作人员确认瓶内有无异物,若存在异物,需要工作人员手动对塑料瓶进行切割,操作较为麻烦,并且需要工作人员手动将切割后塑料瓶内的杂物取出,费时费力的问题。
为实现上述目的,本发明提供如下技术方案:一种塑料粉碎塑料瓶切割装置,包括:
安装架;
移动机构,沿左右方向设在所述移动机构的顶端左侧;
移动机构壳体,设置在所述移动机构的顶端;
橡胶套,设置在所述移动机构壳体的内侧;
保护机构,沿上下方向设置在所述移动机构的顶端右侧;
控制器,设置在所述保护机构的右侧;
升降机构,沿上下方向设置在所述收集槽箱的前侧右端;
电动锯,设置在所述升降机构的顶端,所述电动锯和控制器电性连接;
收集槽箱,沿左右方向设置在所述安装架的内侧底端右侧。
优选的,所述移动机构包括:移动机构壳体、第一电机、第一转轴、第一皮带轮、第二皮带轮、传动皮带、限位槽和连接块;移动机构壳体沿左右方向设在所述移动机构的顶端左侧,所述移动机构壳体的形状为“U”字形;第一电机沿前后方向设置在所述移动机构壳体的后侧左端,所述第一电机的输出端延伸进移动机构壳体的内腔,所述第一电机和控制器电性连接;第一转轴沿前后方向螺钉连接在所述第一电机的输出端;所述第一皮带轮的数量为两个,两个所述第一皮带轮分别过盈配合在第一转轴的外壁前后两侧;所述第二皮带轮的数量为两个,两个所述第二皮带轮分别通过销轴转动连接在移动机构壳体的内腔右侧前后两端;所述传动皮带的数量为两个,两个所述传动皮带的内侧左右两端分别套接在前后两个第一皮带轮和第二皮带轮的外壁;所述限位槽的数量为两个,两个所述限位槽分别沿左右方向开设在所述移动机构壳体的内腔顶端前后两侧,所述限位槽的内腔上下两侧分别与移动机构壳体的外壁和内腔相贯通;所述连接块的数量为两个,两个所述连接块分别插接在前后两个限位槽的内腔,前后两个所述连接块的底端分别与前后两个第一皮带轮的外壁固定连接。
优选的,所述保护机构包括;保护机构外壳、网板、进料口和通槽;保护机构外壳沿上下方向设置在所述移动机构的顶端右侧,所述保护机构外壳的底端延伸至移动机构的内侧,且保护机构外壳的内腔底端和外壁相贯通;网板沿左右方向插接在所述保护机构外壳的右侧底端,所述网板的左端延伸进保护机构外壳的内腔;进料口开设在所述保护机构外壳的内腔左侧,所述进料口的内腔左右两侧分别与保护机构外壳的外壁和内腔相贯通,所述移动机构壳体的右侧由进料口延伸进保护机构外壳的内腔;通槽沿上下方向开设在所述保护机构外壳的内腔前侧,所述保护机构外壳的内腔前后两侧和底端分别与保护机构外壳的内腔和外壁相贯通,所述电动锯内部链条部位由通槽延伸进保护机构外壳的内腔。
优选的,所述升降机构包括:升降机构无外壳、插槽块、限位插杆、顶板和丝杠螺母;升降机构无外壳设置在所述移动机构的顶端右侧与保护机构外壳的对应位置处;所述插槽块的数量为四个,四个所述插槽块分别内嵌在升降机构无外壳的顶端四角,所述插槽块的内腔上下两侧分别与升降机构无外壳的外壁和内腔相贯通;所述限位插杆的数量为四个,四个所述限位插杆分别沿上下方向插接在四个插槽块的内腔;顶板设置在四个限位插杆的顶端;丝杠螺母通过轴承转动连接在所述升降机构无外壳的内腔顶端中心位置,所述轴承的内环与丝杠螺母的外壁过盈配合,且轴承的外环与升降机构无外壳的内壁固定连接,所述升降机构无外壳的顶端延伸出升降机构无外壳的上表面。
优选的,所述升降机构还包括:丝杠螺杆、第一皮带轮、第三电机和第二皮带轮;丝杠螺杆沿上下方向螺接在所述丝杠螺母的内腔,所述丝杠螺杆的顶端与顶板的下表面通过轴承转动连接,所述轴承的内环与丝杠螺杆的外壁过盈配合,且轴承的外环与升降机构无外壳的内壁固定连接;第一皮带轮键连接在所述丝杠螺母的外壁底端;第三电机通过支架设置在所述升降机构无外壳的内腔顶端,所述第三电机和控制器电性连接;第二皮带轮螺钉连接在所述第三电机的输出端,所述第二皮带轮和第一皮带轮通过皮带传动连接。
与现有技术相比,本发明的有益效果是:该塑料粉碎塑料瓶切割装置:
1、通过第一电机驱动第一转轴驱动前后两个第一皮带轮转动,进而使前后两个传动皮带在对应位置上传动皮带的旋转力的作用下转动,促使前后两个连接块在对应位置上传动皮带的驱动下向右侧移动,进而在移动机构壳体的配合下带动橡胶套及其内部塑料瓶穿过进料口进入至保护机构外壳内腔指定位置处;
2、通过第三电机驱动第二皮带轮转动,促使第一皮带轮在第一皮带轮旋转力的作用下驱动丝杠螺母转动,丝杠螺杆在丝杠螺母旋转力的作用下托动顶板带动电动锯沿通槽内腔在保护机构外壳内向上移动,电动锯内部电机驱动链锯转动以在上升同时将橡胶套内塑料瓶由下至上依次进行切割;
3、通过向外侧拉出网板,使丝杠螺杆限内切割废料进入至收集槽箱内,第二电机驱动第二齿轮转动,促使第一齿轮在第二齿轮旋转力的作用下转动,进而使第一齿轮驱动转动转轴带动橡胶套转动,进而使橡胶套在限位转轴的限位作用下逆时针方向转动并倾斜,促使橡胶套内部塑料瓶内废料在重力作用下进入至收集槽箱内腔集中进行收集;
从而可实现多个塑料瓶单次切割操作,操作简单,工作效率较高,并且无需工作人员手动取出切割后塑料瓶内杂物,避免劳动力浪费,更加省时省力。
附图说明
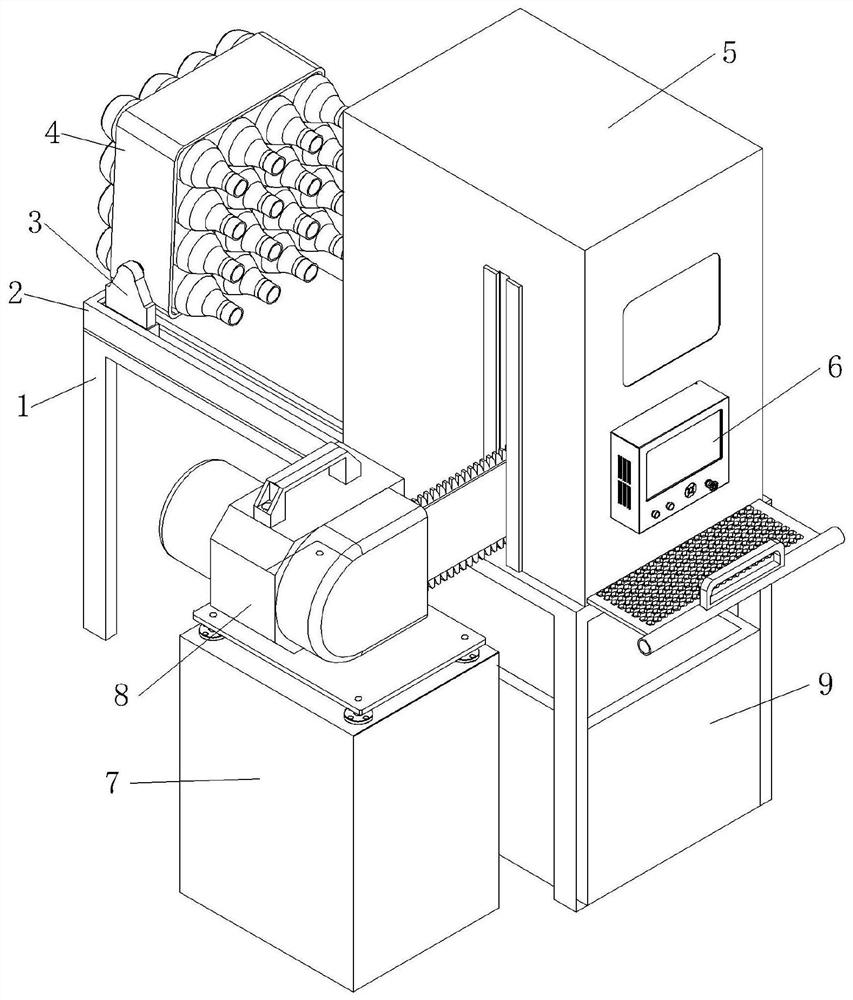
图1为本发明的结构示意图;
图2为图1的移动机构爆炸图;
图3为图1的保护机构爆炸图;
图4为图1的升降机构爆炸图;
图5为图1的翻转机构爆炸图。
图中:1、安装架,2、移动机构,21、移动机构壳体,22、第一电机,23、第一转轴,24、第一皮带轮,25、第二皮带轮,26、传动皮带,27、限位槽, 28、连接块,3、翻转机构,31、连接座,32、限位转轴,33、转动转轴,34、外壳,35、第一齿轮,36、第二电机,37、第二齿轮,4、橡胶套,5、保护机构,51、保护机构外壳,52、网板,53、进料口,54、通槽,6、控制器,7、升降机构,71、升降机构无外壳,72、插槽块,73、限位插杆,74、顶板,75、丝杠螺母,76、丝杠螺杆,77、第一皮带轮,78、第三电机,79、第二皮带轮, 8、电动锯,9、收集槽箱。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-5,本发明提供一种技术方案:一种塑料粉碎塑料瓶切割装置,包括:安装架1、移动机构2、移动机构壳体3、橡胶套4、保护机构5、控制器 6、升降机构7、电动锯8和收集槽箱9;移动机构2沿左右方向设在移动机构2 的顶端左侧;移动机构壳体3设置在移动机构2的顶端;橡胶套4设置在移动机构壳体3的内侧;保护机构5沿上下方向设置在移动机构2的顶端右侧;控制器6设置在保护机构5的右侧,控制器6具体使用型号根据实际使用要求直接从市场上购买安装并使用的;升降机构7沿上下方向设置在收集槽箱9的前侧右端;电动锯8设置在升降机构7的顶端,电动锯8和控制器6电性连接,电动锯8具体使用型号根据实际使用要求直接从市场上购买安装并使用的,电动锯8由控制器6进行控制内部电机驱动链锯转动以进行切割;收集槽箱9沿左右方向设置在安装架1的内侧底端右侧,收集槽箱9可进行拆卸以便于工作人员取出收集槽箱9内部切割废料。
作为优选方案,更进一步的,移动机构2包括:移动机构壳体21、第一电机22、第一转轴23、第一皮带轮24、第二皮带轮25、传动皮带26、限位槽27 和连接块28;移动机构壳体21沿左右方向设在移动机构2的顶端左侧,移动机构壳体21的形状为“U”字形;第一电机22沿前后方向设置在移动机构壳体21 的后侧左端,第一电机22的输出端延伸进移动机构壳体21的内腔,第一电机 22和控制器6电性连接,第一电机22具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第一电机22由控制器6进行控制驱动第一转轴23顺时针或逆时针方向转动;第一转轴23沿前后方向螺钉连接在第一电机22的输出端;第一皮带轮24的数量为两个,两个第一皮带轮24分别过盈配合在第一转轴23的外壁前后两侧,传动皮带26可在对应位置上第一皮带轮24的旋转力的作用下顺时针或逆时针方向转动;第二皮带轮25的数量为两个,两个第二皮带轮25分别通过销轴转动连接在移动机构壳体21的内腔右侧前后两端,第二皮带轮25起到对传动皮带26的张紧和限位作用;传动皮带26的数量为两个,两个传动皮带26的内侧左右两端分别套接在前后两个第一皮带轮24和第二皮带轮25的外壁;限位槽27的数量为两个,两个限位槽27分别沿左右方向开设在移动机构壳体21的内腔顶端前后两侧,限位槽27的内腔上下两侧分别与移动机构壳体21的外壁和内腔相贯通,连接块28可在限位槽27的内腔左右滑动;连接块28的数量为两个,两个连接块28分别插接在前后两个限位槽27的内腔,前后两个连接块28的底端分别与前后两个第一皮带轮24的外壁固定连接。
作为优选方案,更进一步的,保护机构5包括;保护机构外壳51、网板52、进料口53和通槽54;保护机构外壳51沿上下方向设置在移动机构2的顶端右侧,保护机构外壳51的底端延伸至移动机构2的内侧,且保护机构外壳51的内腔底端和外壁相贯通;网板52沿左右方向插接在保护机构外壳51的右侧底端,网板52的左端延伸进保护机构外壳51的内腔,网板52可在保护机构外壳 51的内腔左右移动进行抽拉;进料口53开设在保护机构外壳51的内腔左侧,进料口53的内腔左右两侧分别与保护机构外壳51的外壁和内腔相贯通,移动机构壳体21的右侧由进料口53延伸进保护机构外壳51的内腔;通槽54沿上下方向开设在保护机构外壳51的内腔前侧,保护机构外壳51的内腔前后两侧和底端分别与保护机构外壳51的内腔和外壁相贯通,电动锯8内部链条部位由通槽54延伸进保护机构外壳51的内腔,电动锯8可沿通槽54的内腔上下移动。
作为优选方案,更进一步的,升降机构7包括:升降机构无外壳71、插槽块72、限位插杆73、顶板74和丝杠螺母75;升降机构无外壳71设置在移动机构2的顶端右侧与保护机构外壳51的对应位置处;插槽块72的数量为四个,四个插槽块72分别内嵌在升降机构无外壳71的顶端四角,插槽块72的内腔上下两侧分别与升降机构无外壳71的外壁和内腔相贯通,限位插杆73可在插槽块72的内腔上下移动以对顶板74进行限位;限位插杆73的数量为四个,四个限位插杆73分别沿上下方向插接在四个插槽块72的内腔;顶板74设置在四个限位插杆73的顶端;丝杠螺母75通过轴承转动连接在升降机构无外壳71的内腔顶端中心位置,轴承的内环与丝杠螺母75的外壁过盈配合,且轴承的外环与升降机构无外壳71的内壁固定连接,升降机构无外壳71的顶端延伸出升降机构无外壳71的上表面。
作为优选方案,更进一步的,升降机构7还包括:丝杠螺杆76、第一皮带轮77、第三电机78和第二皮带轮79;丝杠螺杆76沿上下方向螺接在丝杠螺母 75的内腔,丝杠螺杆76的顶端与顶板74的下表面通过轴承转动连接,轴承的内环与丝杠螺杆76的外壁过盈配合,且轴承的外环与升降机构无外壳71的内壁固定连接,丝杠螺杆76可在丝杠螺母75旋转力的作用下向上或向下移动;第一皮带轮77键连接在丝杠螺母75的外壁底端;第三电机78通过支架设置在升降机构无外壳71的内腔顶端,第三电机78和控制器6电性连接,第三电机 78第具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第三电机78由控制器6进行控制驱动第二皮带轮79顺时针或逆时针方向转动;第二皮带轮79螺钉连接在第三电机78的输出端,第二皮带轮79和第一皮带轮77 通过皮带传动连接,第一皮带轮77可在第一皮带轮79旋转力的作用下顺时针验货或逆时针方向转动。
作为优选方案,更进一步的,移动机构壳体3包括;连接座31、限位转轴 32、转动转轴33、外壳34、第一齿轮35、第二电机36和第二齿轮37;连接座 31的数量为两个,两个连接座31分别设置在前后两个连接块28的顶端;限位转轴32通过销轴转动连接在前侧连接座31的内侧顶端,限位转轴32可对橡胶套4进行限位;转动转轴33沿前后方向通过轴承转动连接在后侧连接座31的内侧顶端,轴承的内环与限位转轴32的外壁过盈配合,且轴承的外环与连接座 31的内壁固定连接;外壳34设置在后侧连接座31的后端,转动转轴33的后侧贯穿后侧连接座31并延伸进外壳34内腔;第一齿轮35过盈配合在转动转轴33 的后端;第二电机36沿前后方向设置在外壳34的后侧底端,第二电机36和控制器6电性连接,第二电机36第具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第二电机36由控制器6进行控制驱动第二齿轮37逆时针方向转动,第二电机36的输出端延伸进外壳34内腔;第二齿轮37螺钉连接在第二电机36的输出端,第二齿轮37与第一齿轮35相啮合,第一齿轮35可在第二齿轮37旋转力的作用下顺时针或逆时针方向转动。
通过本领域人员,可将本案中所有电气件与外部适配的电源通过导线进行连接,并且应该根据具体实际使用情况,选择相适配的外部控制器进行连接,以满足对所有电器件的控制需求,其具体连接方式以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,不在进行说明,下述主要介绍工作原理以及过程,具体工作如下。
步骤1:工作人员将需要切割的塑料瓶排列并固定在橡胶套4内部,控制橡胶套6启动第一电机22,第一电机22驱动第一转轴23顺时针方向转动,并使第一转轴23驱动前后两个第一皮带轮24顺时针方向转动,进而使前后两个传动皮带26在对应位置上传动皮带23的限位和张紧作用下及在对应位置上第一皮带轮24的旋转力的作用下顺时针方向转动,促使前后两个连接块28在对应位置上限位槽27限位作用下同时在对应位置上传动皮带26的驱动下向右侧移动,进而在移动机构壳体3的配合下带动橡胶套4及其内部塑料瓶穿过进料口53进入至保护机构外壳51内腔指定位置处;
步骤2:工作人员控制第三电机78和电动锯8依次启动,促使第三电机78 驱动第二皮带轮79顺时针方向转动,由于第一皮带轮77和第一皮带轮79通过皮带传动连接,促使第一皮带轮77在第一皮带轮79旋转力的作用下顺时针方向转动,并使第一皮带轮77驱动丝杠螺母75顺时针方向转动,由于丝杠螺杆76和丝杠螺母75螺接,促使丝杠螺杆76在丝杠螺母75旋转力的作用下向上移动,并使顶板74在限位插杆73的限位作用下,促使丝杠螺杆76托动顶板74 向上移动,进而使顶板74推动电动锯8沿通槽54内腔在保护机构外壳51内向上移动,电动锯8内部电机驱动链锯转动以在上升同时将橡胶套4内塑料瓶由下至上依次进行切割,并使切割后的废料落在网板52上表面;
步骤3:工作人员向外侧拉出网板52,使网板52表面切割废料进入至收集槽箱9内,工作人员控制控制器6启动第二电机36,促使第二电机36驱动第二齿轮37逆时针方向转动,由于第一齿轮35和第二齿轮37啮合,促使第一齿轮 35在第二齿轮37旋转力的作用下顺时针方向转动,进而使第一齿轮35驱动转动转轴33带动橡胶套4逆时针方向转动,进而使橡胶套4在限位转轴32的限位作用下逆时针方向转动并倾斜,促使橡胶套4内部塑料瓶内废料在重力作用下进入至收集槽箱9内腔集中进行收集;
从而可实现多个塑料瓶单次切割操作,操作简单,工作效率较高,并且无需工作人员手动取出切割后塑料瓶内杂物,避免劳动力浪费,更加省时省力。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种塑料粉碎塑料瓶切割装置
- 一种废塑料瓶粉碎机用高效粉碎箱