用于输送工件的输送系统和方法
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及一种用于输送工件的输送系统。在要对车辆车身进行处理、尤其是涂层和干燥时,这种输送系统例如用于机动车的制造。
背景技术
例如已知所谓的单轨输送机,在其中为了沿着轨道系统输送固定在运输托架处的工件,运输托架配设有集成的驱动器。
发明内容
本发明的目的在于提供一种用于输送工件的输送系统,其以简单和灵活的方式构造并且能以高的循环速率输送工件。
根据本发明,该目的通过一种用于输送工件的输送系统得以实现,该输送系统包括:
引导装置,其预先给定输送系统的输送路径;
多个可以沿着引导装置行进的、用于接纳相应的一个或多个工件的运输托架;
至少一个可以沿着引导装置行进的驱动单元。
优选地,至少一个驱动单元可以借助联接装置可选择地与运输托架中的至少一个联接或与其脱开联接。
尤其地,至少一个驱动单元可以在与运输托架脱开联接的状态下以与运输托架无关的方式沿着引导装置行进。为了驱动运输托架中的至少一个,驱动单元优选地可以与所述至少一个运输托架联接。
因此本发明尤其可以提供下述优点,即不是每个运输托架都配设有驱动单元,而是至少一个驱动单元与运输托架的数量无关,并且因此尤其可以用较少数量的驱动单元优选地输送较多数量的运输托架。
有利的可以是,引导装置包括在空间上彼此不同的、在一侧用于引导运输托架的引导区域和在另一侧用于引导至少一个驱动单元的引导区域。
一个引导区域在此尤其是沿着引导装置从引导装置的一个端部移动至引导装置的另一个端部的运输托架所经过的空间区域。
另一个引导区域尤其是沿着引导装置从引导装置的一个端部移动至引导装置的另一个端部的驱动单元所经过的空间区域。
优选地,所有运输托架布置在一个共同的引导区域中,而所有驱动单元优选地布置在与运输托架的引导区域不同的至少一个另外的引导区域中。
引导区域优选地完全彼此分隔开。
尤其地,引导区域优选地不重叠。
引导装置优选地包括轨道装置,运输托架在该轨道装置处被引导和/或以承载的方式被支承。
对此替选地或补充地可以规定,引导装置包括轨道装置,至少一个驱动单元在该轨道装置处被引导和/或以承载的方式被支承。
尤其可以规定,引导装置包括用于引导和/或以承载的方式支承运输托架和至少一个驱动单元的共同的轨道装置。
该轨道装置例如可以具有垂直于输送系统的输送方向所取的基本上呈U形的横截面。
优选地,用于引导运输托架的引导区域布置在被轨道装置、尤其是横截面基本上呈U形的轨道装置包围的内部空间之内。
例如,用于引导运输托架的引导区域可以完全布置在被轨道装置包围的内部空间之内。
对此替选地可以规定,用于引导运输托架的引导区域布置在被轨道装置包围的内部空间之外。
尤其地,用于引导运输托架的引导区域可以完全布置在被轨道装置包围的内部空间之外。
此外可以规定,用于引导至少一个驱动单元的引导区域布置在被轨道装置、尤其是横截面基本上呈U形的轨道装置包围的内部空间之内。
用于引导至少一个驱动单元的引导区域尤其完全布置在被轨道装置包围的内部空间之内。
对此替选地可以规定,用于引导至少一个驱动单元的引导区域布置在被轨道装置包围的内部空间之外。
尤其地,用于引导至少一个驱动单元的引导区域完全布置在被轨道装置包围的内部空间之外。
在本发明的一种改进方案中可以规定,输送系统包括多个用于引导多个驱动单元的引导区域。
例如,在轨道装置的两侧可以设置用于驱动单元的两个引导区域,在其内部空间中例如布置有用于引导运输托架的引导区域。
有利的可以是,输送系统包括能量轨道,其为用于驱动至少一个驱动单元的驱动马达提供驱动能量。
能量轨道尤其是引导装置的组成部分和/或沿着引导装置的轨道装置延伸。在此可以设置无接触的和/或接触的能量传递。
驱动单元的驱动马达尤其是变速马达或伺服马达。
引导装置本身优选地不具有驱动装置。
有利的可以是,尤其为了操控驱动单元和/或为了驱动单元与上级的控制系统的其他的信息技术方面的联接,能量轨道除了能实现能量传递之外还能实现数据传递。因此能量轨道优选地本身用作数据载体。然而对此替选地也可以设置,利用与能量轨道不同的数据载体进行单独的数据传递。
驱动单元优选地包括一个或多个天线,其能实现驱动单元与能量轨道的能量技术方面的和/或数据技术方面的联接。
尤其地,可以在驱动单元处设置基本上以U形围绕能量轨道的天线或多个这种天线。
尤其为了将至少一个驱动单元与一个或多个运输托架以机械的方式联接可以规定,至少一个驱动单元包括联接装置的一个或多个联接元件。
优选地,借助联接装置的操作装置可以可选择地为了抓合运输托架而将一个或多个联接元件带入联接姿态中或为了释放运输托架而将一个或多个联接元件带入释放姿态中。
尤其可以规定,一个或多个联接元件构造成夹具、销、插板或爪,其为了将驱动单元与运输托架联接而与运输托架接合。
有利的可以是,输送系统包括多个彼此独立的驱动单元,其尤其配属于输送系统的输送路径的不同的路段。
尤其地,驱动单元配属于输送系统的输送路径的在运输托架的不同的保持位置之间的彼此不同的路段。
每个路段尤其从一个保持位置延伸至另一个保持位置,从而相应的运输托架和一个或多个布置在该处的工件可以借助配属于所述一个确定的路段的驱动单元从一个保持位置输送至另一个保持位置。
尤其可以在保持位置处将运输托架以及布置在该运输托架处的工件从一个驱动单元转交至另一个驱动单元。
所述至少一个驱动单元优选地包括用于控制驱动单元的控制装置。
控制装置尤其构造和配置成,使得驱动单元配属于一个路段并且沿着该路段将运输托架一个接一个从第一保持位置输送至第二保持位置。
路段在此可以构造成在两侧敞开的和/或线性的或弯曲的,但也可以构造成环形封闭的。在环形封闭构造的路段中,控制装置尤其构造和配置成,使得运输托架可以借助驱动单元例如经过一个完整的圆并且因此可以从第一保持位置再次移动至第一保持位置。
环形封闭构造的路段尤其借助一个或多个转接设备与另外的路段相接。
控制装置优选地还构造和配置成,使得借助其可以操作联接装置,以便分别在第一保持位置处抓合待输送的运输托架并且在另一个保持位置处释放该运输托架。
为了定位和/或监测至少一个驱动单元还可以规定,至少一个驱动单元和/或引导装置配设有编码系统,例如条形码系统、QR码系统和/或RFID系统。尤其在使用控制装置时能实现至少一个驱动单元的高效的控制和监测。
输送系统尤其包括多个驱动单元,其中例如可以借助第一驱动单元以单个依次的方式将运输托架从第一保持位置输送至第二保持位置,然后可以将运输托架转交给第二驱动单元并且借助第二驱动单元从第二保持位置输送至第三保持位置。
一个或多个保持位置尤其是加工工位,借助运输托架输送的工件在该处被加工。
此外可以规定,一个或多个路段是用于加工工件的加工工位。
每个驱动单元优选地包括自己的、独立的控制部(控制装置)和/或自己的、独立的驱动装置、例如摩擦轮驱动装置。
此外可以规定,每个行驶托架包括用于提供用于驱动马达的驱动能量的储能器。
运输托架优选地包括锁定装置、尤其是制动装置。
当驱动单元与运输托架脱开联接时,锁定装置优选地被触发并且因此运输托架被锁定在保持位置中。
此外当驱动单元与运输托架接合并且因此与其联接时,优选地释放锁定装置。
尤其可以规定,借助联接装置的一个或多个联接元件来操作锁定装置。
运输托架优选地包括引导区段,该引导区段尤其包括一个或多个用于在轨道装置处和/或在地面、例如大厅地面上以承载的方式支承和/或用于侧向引导的滚轮。
优选地,运输托架还包括用于接纳一个或多个工件的工件接纳部、例如承载件或滑板接纳部或框架。
优选地,驱动单元包括引导区段,该引导区段尤其包括在轨道装置处或在地面、尤其是大厅地面上以承载的方式支承和/或侧向引导驱动单元的滚轮。
有利的可以是,引导装置包括轨道装置,该轨道装置尤其以支架或借助垫脚位于地面、尤其是大厅地面上。
输送系统尤其可以具有多个彼此连接的或能彼此连接的路段。为了将多个路段彼此连接,输送系统优选地可以具有一个或多个转接设备,一个或多个升降装置、例如升降台,一个或多个转动装置、例如转动台,和/或一个或多个横向位移装置、例如横向位移托架。
一个或多个转接设备、一个或多个升降装置和/或一个或多个转动装置优选地分别包括轨道装置的至少一个区段,以便能够在不放下或移动工件的情况下接纳和转交一个或多个运输托架。
因此可以借助输送系统将运输托架以及必要时连同一个或多个布置在该处的工件根据需要沿不同的方向输送和/或朝向不同的路段输送。例如可以实现横向行驶、竖向行驶和/或转动。
此外有利的可以是,输送系统包括人员保护设备、尤其包括一个或多个环境扫描仪和/或一个或多个接触传感器或类似装置。
至少一个驱动单元例如可以配设环境扫描仪、接触传感器等,以便在至少一个驱动单元沿着引导装置行进时排除与物体或人员的不希望的碰撞。
根据本发明的输送系统尤其能减少不同的输送类型和输送变型方案的数量。
输送系统优选地以模块化的方式设计并且尤其通过补充或移除另外的驱动单元能以简单的方式扩展并且适应所需的件数。
驱动单元可以在时间上得到更好的利用,由此可以在整个输送系统中减少驱动马达的数量。
尤其地,该输送系统在规划、设计、制造、装配和/或安装时能减少费用。
该输送系统优选地可以自由地进行程序设计、可以根据软件设定参数并且优选地适用于工业4.0计划。
优选地,该输送系统还适用于尤其在用于处理工件的烘箱中以无滑板的方式运输工件。
根据本发明的输送系统尤其可以在工作工位和处理工位之间在外部运输车身时应用。
输送系统优选地被放置在喷漆车间的大厅地面上。
此外,输送系统可以应用于缓冲路段(Pufferstrecke)和/或清空存储器(Leerziehspeicher)。
也可以规定,借助输送系统在内部将车身运输穿过工作工位和处理工位。
有利的可以是,为了尤其是保护驱动组件、例如驱动马达免受不希望的外部损害,例如污染、过热等,至少一个驱动单元包括遮盖装置。
此外,本发明的目的在于提供一种用于输送工件的方法,其能以简单的方式被实施并且能实现高效的工件输送。
该目的根据本发明通过在用于输送工件的方法中规定以下内容得以实现:
使至少一个驱动单元沿着引导装置行进;
将驱动单元与可以沿着引导装置行进的、用于接纳一个或多个工件的运输托架联接;
借助驱动单元移动运输托架,以沿着引导装置输送一个或多个工件;
将驱动单元与运输托架脱开联接。
根据本发明的方法优选地具有与根据本发明的输送系统相关地描述的特征和/或优点中的一个或多个优点。
尤其可以规定,至少一个驱动单元沿着引导装置移动经过同样在引导装置处被引导的一个或多个运输托架。
因此,至少一个驱动单元尤其可以移动经过一个或多个运输托架,以到达其他运输托架并且输送该其他运输托架。
有利的可以是,多个驱动单元在运输托架的不同保持位置之间往返并且同时将运输托架沿着引导装置从一个保持位置输送至下一个保持位置。
附图说明
实施例的以下描述和示意性图示说明了本发明的其他优选特征和/或优点。
附图中:
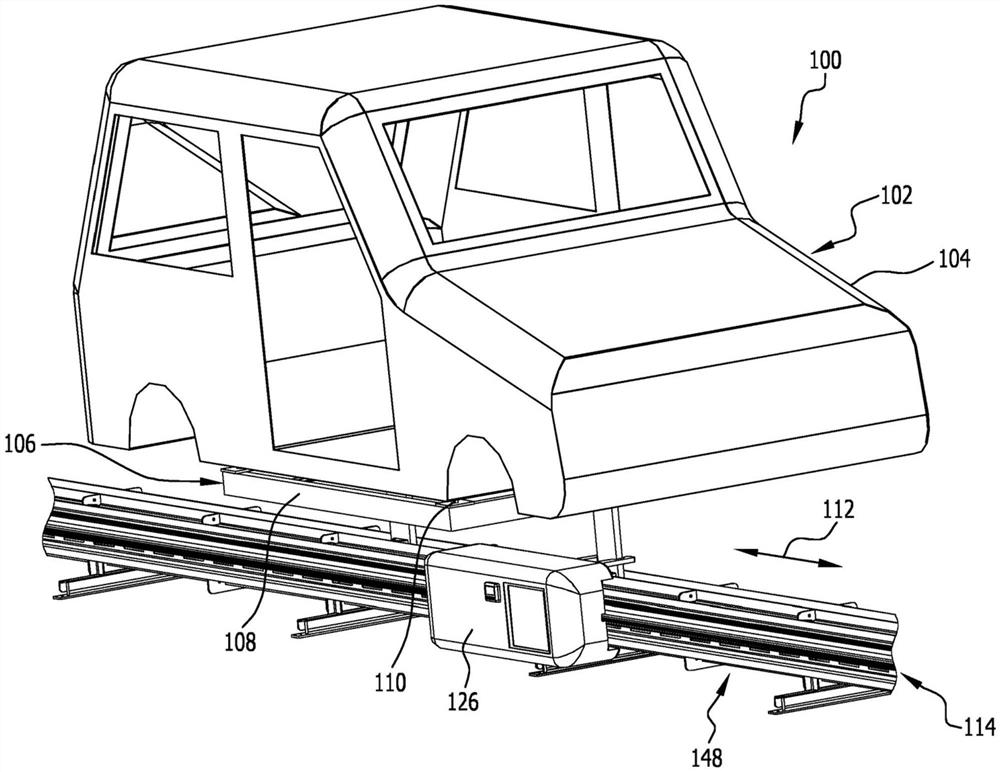
图1示出了输送系统的第一实施方式的示意性透视图,该输送系统包括具有轨道系统的引导装置,输送系统的运输托架和驱动单元以可行进的方式布置在该轨道系统处,其中运输托架在横截面呈U形的轨道装置之内被支承和引导,并且其中在该横截面呈U形的轨道装置之外设置有另外的用于支承和引导驱动单元的引导轨道;
图2示出了图1中的输送系统的在引导装置的区域中的示意性竖直的横截面;
图3示出了图1中的输送系统的轨道装置的与图2对应的示意图;
图4示出了图1中的输送系统的驱动单元的半透明的示意性透视图;
图5示出了输送系统的第二实施方式的示意性透视图,在其中运输托架和驱动单元布置在横截面呈U形的轨道装置之内;
图6示出了图5中的输送系统的与图2对应的示意性剖视图;
图7示出了图5中的输送系统的轨道装置的与图3对应的示意图;
图8示出了输送系统的第三实施方式的示意性透视图,在其中运输托架具有竖直的支撑滚轮,其布置在轨道装置之外并且在地面上滚动,该轨道装置本身也布置在所述地面上;
图9示出了图8中的输送系统的与图2对应的剖视图;
图10示出了图8中的输送系统的轨道装置的与图3对应的示意图;和
图11示出了图8中的输送系统的驱动单元的半透明的示意性透视图。
相同或功能等效的元件在所有附图中配设有相同的附图标记。
具体实施方式
整体以100标记的输送系统的在图1至图4中示出的第一实施方式用于输送工件102、例如车辆车身104。
输送系统100尤其包括多个用于接纳工件102的运输托架106。
每个运输托架106例如包括框架108,该框架包括多个销钉110,该销钉可以布置在工件102中的与此对应的销钉接纳部(未示出)中,以便最终将工件102固定在运输托架106处。
可以借助运输托架106沿着输送系统100的输送路径112输送工件102。
尤其通过输送系统100的引导装置114预先给定输送路径112。
引导装置114尤其用于引导运输托架106。
引导装置114为此优选地包括轨道装置116,运输托架106在该轨道装置处被引导。
此外,在输送系统100的在图1至图4中示出的第一实施方式中规定,运输托架106以承载的方式支承在轨道装置116处。这意味着,轨道装置116不仅用于运输托架106的侧向的定位和进而水平的定位,而且用于承受(Aufnahme)重量并且用于运输托架106沿着输送路径112的竖直的引导。
每个运输托架106优选地包括一个或多个竖直的支撑滚轮118,其用于反向于重力方向g支承运输托架106以及布置在该处的至少一个工件102。此外,每个运输托架106优选地包括一个或多个侧向的引导滚轮120,其用于在水平的且垂直于输送路径112取向的侧向方向上对运输托架106进行定位。此外,一个或多个侧向的引导滚轮120可以用于在直立取向上稳定地保持运输托架106。
轨道装置116尤其包括一个或多个引导轨道122,运输托架106的竖直的支撑滚轮118和/或侧向的引导滚轮120在该引导轨道处滚动。
在输送系统100的在图1至图4中示出的第一实施方式中,例如设置有两个彼此对置的并且朝向彼此敞开的、构造成顶帽式导轨(Hutschienen)的引导轨道122,其用于接纳和支承运输托架106的竖直的支撑滚轮118和/或侧向的引导滚轮120。
包括两个引导轨道122的轨道装置116尤其具有基本上呈U形的横截面并且包围内部空间124,运输托架106的竖直的支撑滚轮118和侧向的引导滚轮120在该内部空间中被引导。
在输送系统100的图1至图4中示出的第一实施方式中,运输托架106优选地不具有自己的驱动装置。
因此在输送系统100中设置有采取输送系统100的一个或多个驱动单元126的形式的外部驱动装置。
每个驱动单元126尤其包括壳体128,在其中布置有驱动单元126的驱动马达130。
此外设置有驱动单元126的一个或多个竖直的支撑滚轮118和/或驱动单元126的一个或多个侧向的引导滚轮120。
对此替选地或补充地还可设置有驱动单元126的一个或多个驱动滚轮132。
驱动滚轮132例如构造成摩擦轮。
驱动马达130尤其用于驱动一个或多个驱动滚轮132旋转。
驱动单元126优选地也在一个或多个引导轨道122处被引导和/或以承载的方式被支承。
用于引导和/或以承载的方支承驱动单元126的引导轨道122尤其布置和/或构造在横截面呈U形的轨道装置116的外侧134处。
例如可以设置唯一一个用于引导和以承载的方式支承驱动单元126的U型导轨形的引导轨道122。
驱动单元126的竖直的支撑滚轮118尤其平行于重力方向g地接合在引导轨道122的基本上水平取向的区域处,而驱动单元126的侧向的引导滚轮120和/或一个或多个驱动滚轮132优选地接合在用于引导和/或以承载的方式支承驱动单元126的引导轨道122的基本上竖直取向的区段处。
尤其为了确保在引导装置114处无间隙地引导和/或以承载的方式无间隙地支承驱动单元126,驱动单元126的竖直的支撑滚轮118中的一个或多个和/或侧向的引导滚轮120中的一个或多个优选地以弹性的方式被支承。
驱动单元126还包括用于控制驱动单元126的控制装置136。
驱动单元126优选地还包括用于接收和/或传递驱动能量和/或数据的天线138。
因此借助天线138尤其可以将驱动单元126与上级的控制系统连接。
天线138优选地构造有基本上呈C形的或U形的横截面并且围绕输送系统100的能量轨道140。
能量轨道140尤其同样布置在横截面呈U形的轨道装置116的外侧134处。此外,能量轨道140例如可以布置在用于引导驱动单元126的引导轨道122处。
能量轨道140优选地在整个输送路径112上延伸,以便确保在输送路径112的每个位置处将能量传递给驱动单元126以及确保驱动单元126与上级的设备控制部的信息技术方面的联接。
如尤其从图1、2和4中获悉,驱动单元126可以借助联接装置142以机械的方式与运输托架106联接。
联接装置142为此包括尤其能以电动的方式操作的、例如构造成爪或夹具的联接元件144。
尤其地,联接元件144可以可选择地与运输托架106接合或从该处移除。对应于图2中的图示,联接元件144例如能在侧向上移动靠近运输托架106并且在其间接纳运输托架。
优选地,联接元件144也可以被带入释放姿态中,在其中联接元件从运输托架106、尤其从运输托架106的移动路径移除。
在输送系统100的在图1至图4中示出的实施方式中,驱动单元126和运输托架106除了可以考虑的借助联接装置142的联接之外能以彼此完全独立的方式沿着输送路径112移动。
尤其地,驱动单元126可以沿着输送路径112被引导经过运输托架106而不与运输托架106接合。
这一点尤其通过下述方式得以实现,即(除了联接装置142之外并且与联接元件144的相应姿态有关地)驱动单元126的引导区域146不会与运输托架106的引导区域146重叠。
在此,引导区域146是当驱动单元126或运输托架106沿着引导装置114从输送路径112的一端移动至输送路径112的另一端时所经过的空间区域。
输送系统100的这种设计方案尤其实现了,借助驱动单元126可以将第一运输托架106沿着输送路径112的路段148从第一保持位置输送到第二保持位置中。
然后例如可以借助另一个驱动单元126在第二保持位置中接合运输托架106并且借助该另一个驱动单元126将运输托架输送至第三保持位置等等。
因此,驱动单元126尤其沿着输送路径112在两个保持位置之间往返并且因此尤其向前和向后沿着预先给定的路段148移动。由此可以实现高的循环频率并且同时可以实现驱动单元126的良好的利用率(Auslastung)。
尤其地,不是每个运输托架106或引导装置114都必须配设有驱动马达130。
输送系统100的在图5至图7中示出的第二实施方式与在图1至图4中示出的第一实施方式的区别主要在于,用于引导运输托架106的引导轨道122和用于引导驱动单元126的引导轨道122以及优选地能量轨道140布置在横截面基本上呈U形的轨道装置116之内。
驱动单元126尤其以在用于以承载的方式支承运输托架106的竖直的支撑滚轮118之间基本上居中的方式被引导。
例如可以设置关于引导装置114的竖直的纵向中心面以彼此镜像对称的方式布置的和/或以彼此镜像对称的方式构造的L形的引导轨道122,以接纳和/或支承运输托架106的竖直的支撑滚轮118和侧向的引导滚轮120及驱动单元126。
能量轨道140优选地以在驱动单元126之下基本上居中的方式布置。
根据输送系统100的在图5至图7中示出的实施方式,联接装置142仅包括驱动单元126的能以电动的方式移动的联接元件144。
联接元件144例如构造成销或插板(Schwert)并且尤其可以反向于重力方向g地向上从驱动单元126的壳体128中移出,以便与运输托架106接合、例如以便与运输托架106的横向支撑149在后部接合(hintergreifen)并且进而可以沿着输送路径112以推动或拉动的方式驱动运输托架106。
此外,输送系统100的在图5至图7中示出的第二实施方式在结构和功能方面与在图1至图4中示出的第一实施方式相同,因而就此参照其上述说明即可。
输送系统100的在图8至图11中示出的第三实施方式与在图5至图7中示出的第二实施方式的区别主要在于,运输托架106虽然在侧向上在轨道装置116处被引导,但并非以承载的方式被支承在该轨道装置处。
更确切地说,运输托架106的竖直的支撑滚轮118布置在轨道装置116之外并且在地面150、尤其是在大厅地面152上滚动。
此外,输送系统100的在图8至图11中示出的第三实施方式在结构和功能方面与在图5至图7中示出的第二实施方式相同,因而就此参照其上述说明即可。
在输送系统100的另外的(未示出的)实施方式中,上面说明的实施方式的一个或多个特征可以彼此任意组合。
- 用于输送工件的自由行驶的运输车和输送系统以及用于处理工件的处理设备
- 工件输送装置和具备该工件输送装置的气门磨床、以及工件输送方法和气门磨削方法