一种接触网参数测量设备及测量方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明属于接触网参数测量领域,更具体地,涉及一种接触网参数测量设备及测量方法。
背景技术
接触网担负着把从牵引变电所获得的电能直接输送给电力机车使用的重要任务。因此接触网的质量和工作状态将直接影响着电气化铁道的运输能力。
日本、法国和德国是世界上高连铁路发展比较快、比较多,被公认比较好的国家,但从这三个国家的高速接触网的型式来看,又各不相同。日本以采用复链型悬挂著称于世界,法国是采用简单链型悬挂为代表的国家,而德国几乎全部为弹性链型悬挂。
我国TB 10621-2009《高速铁路设计规范》规定高速铁路接触网悬挂类型采用全补偿简单链型悬挂或全补偿弹性链型悬挂。双弓或多弓取流时宜采用全补偿弹性链型悬挂。
接触网检测是铁路线路安全运行的必要手段。目前,接触网检测主要依靠人工现场静态测量和接触网检测车两种检测手段,由此获得接触网的几何参数和弓网相互作用的动态参数,从而为运营维修部门提供客观的检修依据。在我国接触网人工现场静态测量中,主要采用山东蓝栋DDJ-8型和唐源电气TDJ-6型的手持式接触网参数检测仪。然而,人工现场静态测量的方式,效率低,强度大,无法适应铁路线路快速增长的需求。
现有的检查方式,一方面,对于检测车在顶部安装检查方式,造价高、协调难、安全无法保障,只能进行粗糙检查;一方面,对于静态测量方式,测量过程需要人工参与对测量点的对准与选取,且每测量一个节点需要进行设备搬抬,费时费力;另一方面,对于动态测量的设备,也是需要在静止或是低速行走时才能完成测量工作,且动态测量条件下存在测量精度低、效率低下等问题。以上两个方面均无法适应铁路线路快速增长的需求。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种接触网参数测量设备及测量方法,其可自动瞄准与定位,实现无需人工参与的接触网几何参数的测量,且综合精度高、测量效率。
为实现上述目的,按照本发明的一个方面,提供了一种接触网参数测量设备,其特征在于,包括移动小车、限界激光传感器、伸缩测量架和三维激光扫描仪,其中,
所述移动小车包括车体以及共同安装在所述车体上的里程编码器和多个车轮,每个所述车轮均可转动安装在所述车体上,所述里程编码器与其中一个车轮连接,以通过车轮的转动获得所述移动小车在轨道上的距离变化;
所述伸缩测量架包括伸缩测量支座、伸缩测量支架和锁紧装置,所述伸缩测量支座通过所述车体支承,所述伸缩测量支架上下位置可调整地安装在所述伸缩测量支座上,并且所述伸缩测量支架调整到位后通过所述锁紧机构锁紧在所述伸缩测量支座上;
所述限界激光传感器安装在所述伸缩测量支座上,以用于获得对应位置的两个接触网支柱的内侧水平距离数据;
所述三维激光扫描仪安装在所述伸缩测量支架的顶端,以用于获得柔性接触线或刚性接触线的轮廓,并且该三维激光扫描仪发出的激光光束朝上。
优选地,所述伸缩测量支座与所述车体之间设置有加强肋。
优选地,所述伸缩测量支架伸入所述伸缩测量支座内,并且所述伸缩测量支架上竖直设置有一列通孔,所述锁紧装置为螺栓装置,锁紧装置穿过所述伸缩测量支座上的连接孔和所述伸缩测量支架上的通孔,以将所述伸缩测量支架锁紧在所述伸缩测量支座上。
按照本发明的另一个方面,还提供了所述的接触网参数测量设备进行接触网参数的测量方法,其特征在于,包括以下步骤:
1)在主机上进行接触网类型的选择,主机加载预先存储的接触线的轮廓的模型点云,其中,所述接触线为柔性接触线或钢性接触线;
2)里程编码器获得参数测量设备在轨道上移动过程中的距离变化量并传送给同步控制器,同步控制器根据等间隔距离变化量连续对激光扫描仪进行连续的触发,从而得到接触线表面的数据并传送给主机并形成接触网轮廓的采集点云;
3)基于欧式聚类的方式对所述采集点云的离散噪点进行滤除;
4)将经过去噪后的所述采集点云作为起始点集P={P
5)计算
6)根据步骤5)得到平移矩阵,得到所需接触线的拉出值及导高值,其中,平移矩阵在y轴的Y值是拉出值;平移矩阵在z轴上的Z值是导高值。
优选地,步骤4)中m次迭代过程具体包括以下子步骤:
4.1)从起始点集P取点集
4.2)计算出终止点集Q中的点集
4.3)更新点集并计算
4.4)计算点集
4.5)如果d
优选地,步骤2)中,所述同步控制器获得里程编码器测量的车轮转动信息,感知参数测量设备的距离变化,然后根据距离变化,等间隔触发三维激光扫描仪发出激光,使得主机获得接触线轮廓的完整的数据信息。
优选地,步骤3)中,所述主机把接触线的连续多个断面按间隔的距离值在参数测量设备行进的方向进行组合与对齐,最终形成完整的接触线的三维数据。
优选地,步骤3)中,所述主机对接触线的每个断面的数据进行曲线拟合,根据柔性或是钢性接触线的不同,利用不同的标准接触线数据与主机内部存储的模型点云进行匹配,可与存储的模型点云匹配的数据作为目标接触线数据,其他非相关数据被剔除,仅保留目标接触线的数据。
优选地,在接触网参数测量设备移动过程,主机通过剔除非相关的接触线数据,对保留的有效的目标接触线数据进行跟踪与拉出值及导出值参数的连续计算,自动根据目标接触线的位置存储计算结果,从而达到自动寻线的目的。
优选地,所述接触网参数测量设备最多可实现对属于三个锚段的接触线的参数同时进行测量,即最多能显示三根接触线的检测结果,其中:
属于同一锚段的接触线的轮廓数据在空间位置上是连续的,接触网参数测量设备通过识别连续的接触线的轮廓数据,当轮廓数据在空间位置上是连续时,归为一个锚段,其计算结果与该锚段相关联;
当检测到连续的接触线的轮廓数据有两根时,其第二根连续的接触线参数作为第二个锚段的结果进行存储;
当检测到连续的接触线的轮廓数据有三根时,其第二根、第三根连续的接触线参数分别作为第二个锚段、第三个锚段的结果进行存储。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
1)本发明利用三维激光扫描仪采集接触线部位的空间三维点云,进行接触线相关检测对象配件进行提取与分析,实现一种非接触式、实时、快速测量接触网几何参数的自动化仪器。
2)本发明利用高速、高精度的三维激光扫描仪采集接触线区域数据,形成完整的接触网三维模型,在快速行走的条件下,自动分析支柱与接触线的位置,自动瞄准与定位,实现无需人工参与的接触网几何参数的测量,且综合精度高、测量效率。
3)采用了远距离、高精度的三维激光扫描仪,设计了可自由伸缩的伸缩测量架,放置于车体上,通过伸缩调整,及锁紧机构进行锁定,三维激光扫描仪相对车体只在垂直方向移动,无摆动,结构稳定性更好;另一方面,参数测量设备中设计了包含车轮的移动小车,使得参数测量设备可进行人工推行,测量过程不需要搬运,同时不需要停止。
4)本发明可采用推行式连续测量,测量效率和自动化高,可以获得接触网的导高、拉出值、支柱侧面限界、定位器坡度、轨距等参数,具备数据分析和自动计算功能。
附图说明
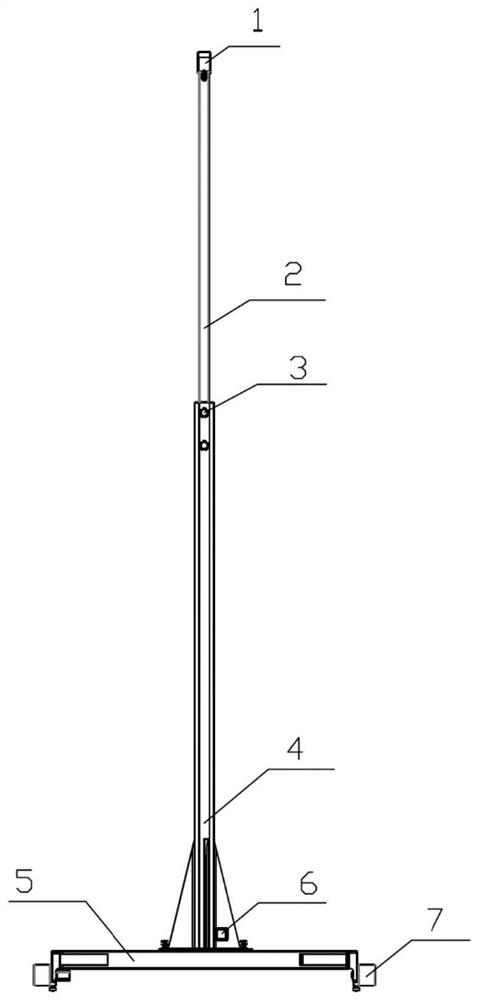
图1是本发明中接触网参数测量设备的主视图;
图2是本发明中接触网参数测量设备的侧视图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
参照图1、图2,一种接触网参数测量设备,包括移动小车、限界激光传感器6、伸缩测量架和三维激光扫描仪1,其中,
所述移动小车包括车体5以及共同安装在所述车体5上的里程编码器和多个车轮7,每个所述车轮7均可转动安装在所述车体5上,所述里程编码器与其中一个车轮7连接,以通过车轮7的转动获得所述移动小车在轨道上的距离变化;
所述伸缩测量架包括伸缩测量支座4、伸缩测量支架2和锁紧装置,所述伸缩测量支座4通过所述车体5支承,所述伸缩测量支架2上下位置可调整地安装在所述伸缩测量支座4上,并且所述伸缩测量支架2调整到位后通过所述锁紧机构3锁紧在所述伸缩测量支座4上;
所述限界激光传感器6安装在所述伸缩测量支座4上,以用于获得对应位置的两个接触网支柱的内侧水平距离数据;
所述三维激光扫描仪1安装在所述伸缩测量支架2的顶端,以用于获得柔性接触线或刚性接触线的轮廓,并且该三维激光扫描仪1发出的激光光束朝上。
进一步,所述伸缩测量支座4与所述车体5之间设置有加强肋,以进一步提高参数测量设备的强度及稳定性,防止三维激光扫描仪1在测量时的摆动或抖动。
进一步,所述伸缩测量支架2伸入所述伸缩测量支座4内,并且所述伸缩测量支架2上竖直设置有一列通孔,所述锁紧装置为螺栓装置,锁紧装置穿过所述伸缩测量支座4上的连接孔和所述伸缩测量支架2上的通孔,以将所述伸缩测量支架2锁紧在所述伸缩测量支座4上,这样方便三维激光扫描仪1调整高度,以适应不同高度的接触网。通过这种方式适应柔性和钢性接触线这不同接触线的参数测量,这也是本参数测量设备与其他产品在结构上的又一明显区分。
本发明采用远距离、高精度的三维激光扫描仪1,与其他同类产品采用的单点测量有明显的区别,而且采用里程编码器的里程信号感知参数测量设备在轨道平移过程中的距离变化,由距离变化间隔连续对三维激光扫描仪1进行同步触发,从而得到接触线表面连续的轮廓数据,形成完整的接触线数据,而非其他产品中所描述的参数测量设备只到测量点才停留进行测量。
本发明采用数据交换机作为参数测量设备中用于数据交换的媒介,集中交换三维激光扫描仪1数据、限界激光传感器6数据和同步控制器数据,数据交换机与主机连接通信。
数据信号流向:三维激光扫描仪1通过数据交换机传输接触线的轮廓数据给主机,限界激光传感器6通过数据交换机传送接触网支柱数据给主机,同步控制器通过数据交换机传输同步数据给主机;里程编码器与同步控制器连接,为三维激光扫描仪1提供等间隔信号。
主机的功能:主机安装在移动小车上,用于获取三维激光扫描仪1的接触线的轮廓数据、限界激光传感器6的数据和同步控制器同步数据。对接触线的轮廓数据进行匹配、计算接触线相关参数,存储结果。
三维激光扫描仪1的功能:用于获取接触线连续的轮廓数据,并通过数据交换机传输给主机。
限界激光传感器6的功能:用于获取接触网支柱侧面距离数据,并通过数据交换机传输给主机。
同步控制器的功能:连接里程编码器,用于感知里程编码器的距离变化,以等距离向三维激光扫描仪1发送信号。
按照本发明的另一个方面,还提供了所述的接触网参数测量设备进行接触网参数的测量方法,包括以下步骤:
1)在主机上进行接触网类型的选择,主机加载预先存储的接触线的轮廓的模型点云,其中,所述接触线为柔性接触线或钢性接触线;
2)里程编码器获得参数测量设备在轨道上移动过程中的距离变化量并传送给同步控制器,同步控制器根据等间隔距离变化量连续对激光扫描仪进行连续的触发,从而得到接触线表面的数据并传送给主机并形成接触网轮廓的采集点云;
3)基于欧式聚类的方式对所述采集点云的离散噪点进行滤除;
4)将经过去噪后的所述采集点云作为起始点集P={P
接触线的轮廓的模型点云是在标准状态下对接触线的轮廓进行扫描,得到接触线的标准三维点云轮廓数据,通过标准三维点云轮廓数据可得到接触线设计拉出值和和设计导高值;
其中,m次迭代过程具体包括以下子步骤:
4.1)从起始点集P取点集
4.2)计算出终止点集Q中的点集
4.3)更新点集并计算
4.4)计算点集
4.5)如果d
5)计算
6)根据步骤5)得到平移矩阵,得到所需接触线的拉出值及导高值,其中,平移矩阵在y轴的Y值是拉出值;平移矩阵在z轴上的Z值是导高值。
进一步,步骤2)中,所述同步控制器获得里程编码器测量的车轮7转动信息,感知参数测量设备的距离变化,然后根据距离变化,等间隔触发三维激光扫描仪1发出激光,使得主机获得接触线的轮廓的完整数据信息。
进一步,步骤3)中,三维激光扫描仪1作为获取接触线表的轮廓数据的核心传感器,在同步控制器的控制下,等间隔获取接触线在纵向上的断面数据;主机把接触线的连续多个断面按间隔的距离值在参数测量设备行进的方向进行组合与对齐,最终形成接触线的完整的轮廓。
进一步,步骤3)中,所述主机对接触线表面的每个断面的数据进行曲线拟合,根据柔性或是钢性接触线的不同,加载不同的曲线拟合方法,并与主机内部存储的接触线表面的模型点云进行匹配,可与存储的接触线表面的模型点云曲线匹配的数据作为目标接触线数据,其他非相关数据被剔除,仅保留目标接触线的数据。非相关数据包括电连接器、吊弦线及定位管等非接触线数据。
进一步,本发明可实现自动寻线的算法。自动寻线是指,线路中通常会在同一空间存在多根接触线,其作用各不相同,根据同一根接触线在测量系统平移过程中,其接触线的轮廓数据在空间上是连接的这一特点,通过对目标接触线的轮廓数据进行连续位置(包括X、Y参数)进行计算,在空间上,相同位置的线缆数据作为同一根接触线处理,其检测结果存储为同一根接触线的参数。在接触网参数测量设备移动过程,主机通过剔除非相关的接触线数据,对保留的有效的目标接触线数据进行跟踪与拉出值及导出值参数的连续计算,自动根据目标接触线的位置存储计算结果,从而达到自动寻线的目的,自动寻线可以无需人工参与寻线过程,与其他产品相比较,自动寻线的计算效率高,操作人员不再关心接触线的位置,不需要人工去瞄准测量位置。
进一步,接触网系统中最多只有3个锚段,所述接触网参数测量设备最多可实现对属于三个锚段的接触线的参数同时进行测量,即最多能显示三根接触线的检测结果,其中:
属于同一锚段的接触线的轮廓数据在空间位置上是连续的,接触网参数测量设备通过识别连续的接触线的轮廓数据,当轮廓数据在空间位置上是连续时,归为一个锚段,其计算结果与该锚段相关联;
当检测到连续的接触线的轮廓数据有两根时,其第二根连续的接触线参数作为第二个锚段的结果进行存储;
当检测到连续的接触线的轮廓数据有三根时,其第二根、第三根连续的接触线参数分别作为第二个锚段、第三个锚段的结果进行存储。
本发明的接触网参数测量设备的性能指标参见表1。
表1接触网参数测量仪性能指标表
本参数测量设备满足的功能如下:
(1)测量功能:
本参数测量设备的测量精度在±3mm,测量速度最高可达5km/h,对于柔性接触线可有约110个定位测量点,对于刚性接触线可有约700个定位测量点。
性能指标满足表1的要求。
(2)线路里程数据记录;
(3)杆号记录:输入起始杆号,自动按照规则进行记录(上下行按照单、双数增加);
(4)数据记录方式:数据对应里程、定位点杆号进行排列存储,以表格形式导出,定点测量可选择性存储;
(5)数据分析;设备考虑刚性、柔性两种不同形式的测量模式。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种接触网参数测量设备及测量方法
- 一种基于几何放大原理和单目计算机视觉的接触网几何参数测量方法