一种杯形柔轮筒体结构
文献发布时间:2023-06-19 10:02:03
技术领域
本发明涉及一种杯形柔轮筒体结构,用于减小柔轮因弹性变形导致的应力 集中,提高柔轮承载能力。
背景技术
柔轮作为谐波减速器中最为薄弱也是最易发生疲劳破坏的零件,其结构形 式对柔轮的承载与寿命影响很大。柔轮作为弹性变形体,在凸轮强制变形力作 用下,呈交变应力状态,在变形区过渡区域容易产生应力集中,载荷应力分布 不均的现象。
柔轮常用的结构有杯形、礼帽型、环形等,其中以杯形柔轮结构最为复杂 且存在严重的应力集中现象,导致柔轮极易发生疲劳破坏。目前杯形柔轮常用 筒体结构为直筒型,即采用光滑薄壁圆筒,且壁厚没有变化,虽然会在筒体与 桶底区域采用圆弧过渡,但是仍然存在应力集中现象;目前柔轮筒底结构普遍 采用角度在1-3°倾斜线作为过渡结构,该结构虽然在一定程度上实现了等强 度梁的设计,但是在筒底辐板与筒底法兰过渡区应力过渡区范围小,应力集中 仍然突出。
发明内容
本发明要解决的技术问题是:克服现有技术的不足,提供了一种杯形柔轮 筒体结构,在筒侧壁过渡区采用波纹结构,减弱柔轮开口处强制变形影响;在 筒底过渡区采用等强度辐板结构,减弱辐板与法兰交接处应力集中,提高辐板 承载抗弯承载能力。
本发明目的通过以下技术方案予以实现:
一种杯形柔轮筒体结构,包括筒侧壁、与筒侧壁连接的筒底;所述筒底的 中部设有通孔,通孔的两侧相对位置各设一个法兰孔;
所述筒侧壁在靠近筒底处设有波纹结构和第一过渡部,波纹结构与第一过 渡部连接,第一过渡部与筒底连接;
所述波纹结构各处的厚度相等,波纹结构的波峰圆弧半径与波纹结构的波 谷圆弧半径不等;
所述第一过渡部为两段半径不等的圆弧,第一过渡部的厚度小于波纹结构 的厚度;
所述筒底在靠近法兰孔的位置设有第二过渡部,第二过渡部为四段半径不 等的圆弧,从筒侧壁到通孔的方向,四段圆弧的半径依次减小。
上述杯形柔轮筒体结构,优选的,所述波纹结构的厚度T2为(0.52~0.55) ×T3,其中T3为柔轮齿圈壁厚;
T3=(75+Z
上述杯形柔轮筒体结构,优选的,所述第一过渡部靠近波纹结构的圆弧半 径R6为(0.02~0.03)×柔轮轮齿分度圆直径。
上述杯形柔轮筒体结构,优选的,所述第一过渡部远离波纹结构的圆弧半 径R5为(R6+T2)×(0.9~1.0)。
上述杯形柔轮筒体结构,优选的,所述筒底靠近第一过渡部处的厚度T1 为T2×(0.8~0.9)。
上述杯形柔轮筒体结构,优选的,所述第二过渡部的最大厚度T为T1× (3~4)。
上述杯形柔轮筒体结构,优选的,所述第二过渡部中最小的圆弧半径为R1 为0.2mm~0.4mm,该圆弧弧度为45°~65°。
上述杯形柔轮筒体结构,优选的,所述第二过渡部中最大的圆弧半径为R4 为(80~120)×R1。
上述杯形柔轮筒体结构,优选的,所述第二过渡部中紧挨圆弧半径为R1 的圆弧半径R2为(3.5~4.5)×R1,该圆弧弧度为15°~25°。
上述杯形柔轮筒体结构,优选的,所述第二过渡部中紧挨圆弧半径为R4 的圆弧半径R3为(15~18)×R1,该圆弧弧度为6°~10°。
本发明相比于现有技术具有如下有益效果:
(1)本发明提出的杯形柔轮筒体结构,能够大幅降低筒底与筒体过渡区域 应力集中、筒底辐板与筒底法兰过渡区应力集中现象,提高抗疲劳能力;能够 实现筒底过渡区等强度,降低筒底承载变形应力幅值,提高柔轮承载能力。
(2)柔轮筒体壁厚T2适当取值能够同时兼顾柔轮承载与变形,在不降低 承载能力的前提下,最大程度增加柔轮应力辐射区,提高柔轮抗疲劳的能力。
(3)柔轮筒底采用多段渐进性圆弧结构,该结构能够平缓筒底应力集中区, 提高柔轮抗疲劳能力,同时实现等强度设计,提高柔轮承载能力。
(4)筒体过渡区采用波纹结构可以大幅减小柔轮过渡区域应力幅值,提高 柔轮的承载能力。
附图说明
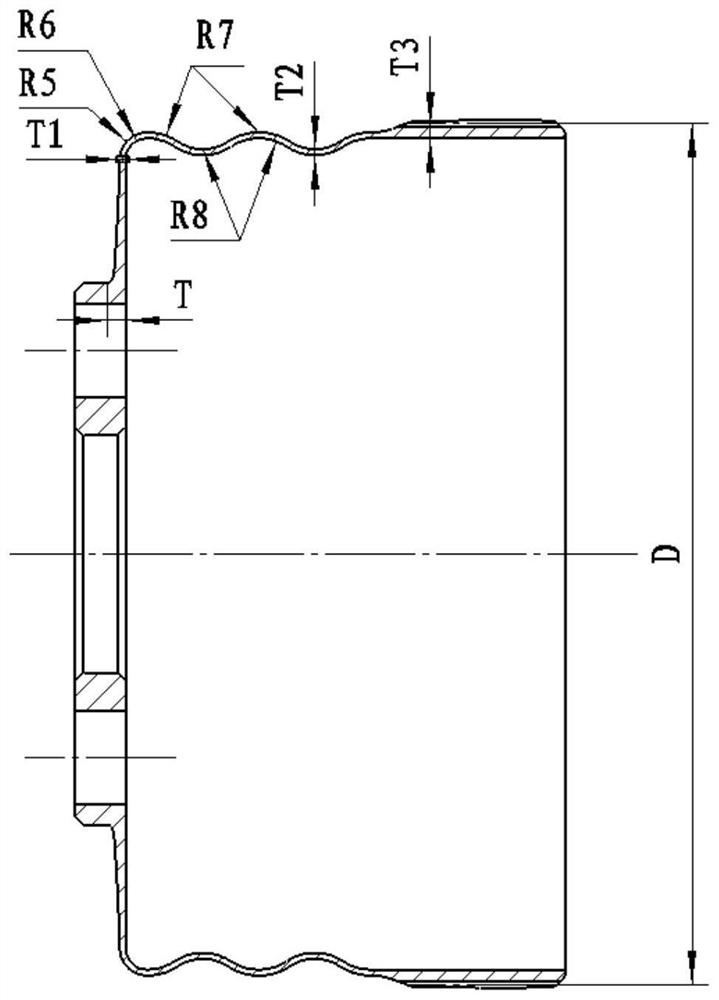
图1为柔轮筒体结构局部剖视第一示意图;
图2为柔轮筒体结构局部剖视第二示意图;
图3为柔轮筒底结构局部剖视示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明 的实施方式作进一步详细描述。
一种杯形柔轮筒体结构,包括筒侧壁、与筒侧壁连接的筒底;所述筒底的 中部设有通孔,通孔的两侧相对位置各设一个法兰孔;所述筒侧壁在靠近筒底 处设有波纹结构和第一过渡部,波纹结构与第一过渡部连接,第一过渡部与筒 底连接;所述波纹结构各处的厚度相等,波纹结构的波峰圆弧半径与波纹结构 的波谷圆弧半径不等;所述第一过渡部为两段半径不等的圆弧,第一过渡部的 厚度小于波纹结构的厚度;所述筒底在靠近法兰孔的位置设有第二过渡部,第 二过渡部为四段半径不等的圆弧,从筒侧壁到通孔的方向,四段圆弧的半径依 次减小。
所述波纹结构的厚度T2为(0.52~0.55)×T3,其中T3为柔轮齿圈壁厚;
T3=(75+Z
所述第一过渡部靠近波纹结构的圆弧半径R6为(0.02~0.03)×柔轮轮齿 分度圆直径。
所述第一过渡部远离波纹结构的圆弧半径R5为(R6+T2)×(0.9~1.0)。
所述筒底靠近第一过渡部处的厚度T1为T2×(0.8~0.9)。
所述第二过渡部的最大厚度T为T1×(3~4)。
所述第二过渡部中最小的圆弧半径为R1为0.2mm~0.4mm,该圆弧弧度 为45°~65°。
所述第二过渡部中最大的圆弧半径为R4为(80~120)×R1。
所述第二过渡部中紧挨圆弧半径为R1的圆弧半径R2为(3.5~4.5)×R1, 该圆弧弧度为15°~25°。
所述第二过渡部中紧挨圆弧半径为R4的圆弧半径R3为(15~18)×R1, 该圆弧弧度为6°~10°。
实施例:
一种杯形柔轮筒体结构,用于减小柔轮因弹性变形导致的应力集中,提高 柔轮承载能力。
1)筒体过渡区采用波纹结构,波峰最外径与柔轮筒体最大外径一致,波高 为2~4倍凸轮最大变形量;如图1所示。
柔轮筒体采用波纹结构,即1波峰+2波谷结构。
T3=(75+Z
T2=(0.52~0.55)×T3,T2为筒体壁厚。
R7-R8=T2,其中波峰圆弧半径R7、波谷圆弧半径R8。
R6=(0.02~0.03)×D。
R5=(R6+T2)×(0.9~1.0)。
T1=T2×(0.8~0.9)。
T=T1×(3~4)。
2)筒底采用等强度辐板结构,由4段圆弧组成,从而实现了柔轮等强度 变形,如图2所示。
R1=0.2mm-0.4mm,A=45-65°
R2=(3.5~4.5)×R1,B=15-25°
R2=(15~18)×R1,C=6-10°
R4=(80~120)×R1。
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何 本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法 和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发 明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、 等同变化及修饰,均属于本发明技术方案的保护范围。
- 一种杯形柔轮筒体结构
- 一种谐波减速器杯形柔轮多齿啮合复合应力求解方法