一种多功能海域探测机器人及其使用方法
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及海域探测、搜索,水质监测等技术领域,尤其涉及一种多功能海域探测机器人及其使用方法。
背景技术
近些年,深海海域探测、深海海底打捞等逐渐被企事业单位的研究学者们引起了重视,由于深海海域存在许多未知,利用人们潜水时,往往因为潜水设备、人们身体等自身存在的缺陷,造成了无法潜入深海区域进行探测需要。基于这些客观原因的存在,致使人们不得不研发海域探测机器人,以便于在深海区域进行正常工作以满足使用的需要,尤其是在事故飞机黑匣子打捞、事故船只运载物探测、海底生物和水质探测等方面,均需要采用海域探测机器人。
目前海域探测机器人存在的共性缺陷主要表现在:功能相对单一、结构相对复杂、价格相对高昂等,同时由于海水是不停流动且无规律的,虽然探测区域的面积不变,但是探测区域底部海水的实时变化性是不停变化的。在深海区域探测时,探测区域的探测结果如果不能第一时间反馈到总控制器或者对于海域探测机器人在已经获知探测物详情时而出现意外情况(例如丢失、断电等),那么海水的上述特点及海域探测机器人自身功能的缺陷对探测的最终结果或者探测的准确性将影响甚大。本发明正是基于上述研究背景而提出,旨在提供一种多功能海域探测机器人及其使用方法以满足使用要求。
发明内容
针对现有技术中海域探测机器人存在的上述不足,本发明的目的在于:提供一种多功能海域探测机器人及其使用方法,其具有结构设计合理、操作使用方便、能够在探测区域进行多机器同步工作等特点,同时在多机器同时作业时,能够按照预设的行走路线进行行走,不易发生碰撞,探测结果实时进行反馈并可以通过相互组网的方式大大提高探测精度。
为了达到上述目的,本发明采用如下技术方案实现:
一种多功能海域探测机器人,所述多功能海域探测机器人以矩阵布设的方式布在待探测海域海水区域内进行探测;所述矩阵布设的方式为多功能海域探测机器人的数量按照2×2、3×3……N×N的矩阵布设方式进行布设,其中N≥2,且为整数;所述多功能海域探测机器人包括机器人本体、行走机构、照明机构、自动控制系统;其中,机器人本体上设置有用于安装行走机构和照明机构的行走机构安装部、照明机构安装部;所述行走机构包括对称设置在机器人本体左右两侧并位于前端和尾端的运动组件,即所述运动组件一共具有4组,每组所述运动组件包括一个X向运动组件、一个Y向运动组件和两个Z向运动组件;所述X向运动组件横向安装在所述机器人本体结构一侧的端部,用于海域探测机器人的X向水平运动;所述Y向运动组件与所述X向运动组件位于机器人本体同一侧,并与X向运动组件垂直且位于同一水平面上,用于海域探测机器人的Y向水平运动;所述Z向运动组件为两个,分别控制+Z向和-Z向的竖直运动;所述Z向运动组件安装在垂直于X向运动组件与Y向运动组件所在的水平面的竖直平面上;所述自动控制系统包括:控制器、传感器组件、通信组件、远程工控机;所述传感器组件与控制器数据信号连接;所述控制器通过通信组件与相邻的海域探测机器人及远程工控机通信连接;所述控制器包括数据处理单元、数据通讯总线单元、数据串口通讯单元、GPS定位单元、驱动电路单元、计时器单元;所述数据通讯总线单元分别与数据处理单元、数据串口通讯单元、GPS定位单元、驱动电路单元、计时器单元电连接;所述驱动电路单元与行走机构驱动连接;所述数据通讯总线单元还与相邻的海域探测机器人的数据通讯总线单元、以及远程工控机无线通讯连接。
作为上述方案的进一步优化,所述传感器组件安装在机器人本体的前方、左侧前端、左侧中央、左侧后端、右侧前端、右侧中央、右侧后端及后方;每个所述传感器组件包括激光测距传感器、CMOS传感器、毫米波雷达传感器;所述激光测距传感器和毫米波雷达传感器作为距离检测主要元件;所述CMOS传感器作为距离检测辅助元件;所述激光测距传感器、CMOS传感器、毫米波雷达传感器间隔设置在预设的位置处分别用于实时检测海域探测机器人与相邻的海域探测机器人之间的距离,从而保证以组网方式运行的多个机器人能够以矩阵的布设方式运行;所述激光测距传感器、CMOS传感器、毫米波雷达传感器还能够用于实时检测海域探测机器人与水下障碍物之间的距离信息和图像信息,并将实时检测到的信息发送至控制器;所述控制器将接收到的实时检测信息经数据转换后,首先根据激光测距传感器和毫米波传感器检测得到的水下障碍物与海域探测机器人的主检测距离信息,然后根据水下障碍物的图像信息确定水下障碍物的轮廓形状,通过图像识别软件计算得到水下障碍物与海域探测机器人的辅助检测距离信息,再将主检测距离信息与辅助检测信息所得到的距离值取平均值,并作为实时检测得到的最终值;根据最终值的大小与预设的距离值进行比较,根据比较的结果控制行走机构的工作状态;当实时检测得到的最终值小于预设的距离值时,控制器控制行走机构的X向运动组件和/或Y向运动组件和/或Z向运动组件工作以调整海域探测机器人的运动方向,反之,则不作调整。
作为上述方案的进一步优化,所述机器人本体上还设置有用于收集当前待测区域内水的自动收集容器;所述自动收集器包括储水盒、设置于储水盒内的水质分析仪、设置于储水盒上的进水口和出水口;所述水质分析仪与控制器数据信号连接用于实时检测储水盒内的水质情况,并将实时检测的水质信息发送至控制器;所述进水口和出水口上设置有自动启闭板;所述控制器与自动启闭板控制连接;所述储水盒的进水口和出水口处设置有与自动启闭板形状相适配的导向滑道;所述自动启闭板滑动设置于进水口和出水口处用于自动打开和关闭进水口和出水口;所述自动启闭板的边框处还设置有电磁铁;所述进水口和出水口处还设置有与电磁铁相互配合的铁片用于将进水口和出水口在关闭状态下将自动启闭板进行锁定限位。
作为上述方案的进一步优化,所述机器人本体上还设置有楔形尾翼,所述楔形尾翼通过铰链设置于机器人本体的后侧中央位置处,所述楔形尾翼的转动角度为0-180°,其转动通过致动器进行致动。所述铰链包括机器人本体内的枢转轴,以及与枢转轴铰接的尾翼连接座;所述尾翼连接座上设置有若干个楔形尾翼安装孔、楔形尾翼调节孔,用于方便地安装或拆卸楔形尾翼;所述枢转轴的外周面上间隔设置若干个沿枢转轴轴线方向布设的弧形凸起;所述尾翼连接座内壁设有若干组相互平行且与所述弧形凸起相配合的弧形凹槽,通过旋转楔形尾翼,呈直线布设的弧形凸起能够分别与呈直线布设的弧形凹槽相互配合,用于楔形尾翼的转动角度调节限位;所述楔形尾翼还包括垂直设置在尾翼连接座上的楔形板,所述楔形板的两侧边为流线型。
作为上述方案的进一步优化,所述X向运动组件、Y向运动组件和Z向运动组件为喷气式气动结构;所述喷气式气动结构包括气体发生器、气泵、喷嘴、喷气调节阀;所述气泵设置于行走机构安装部上,所述喷嘴通过喷气调节阀与气泵连接;所述控制器与喷气调节阀控制连接。
本发明还提供一种多功能海域探测机器人的使用方法,该使用方法包括如下步骤:步骤1)准备阶段:根据实际使用需要,确定多功能海域探测机器人的数量,并将确定后多功能海域探测机器人的数量按照2×2、3×3……N×N的矩阵布设方式进行布设,其中N≥2,且为整数;并将多功能海域探测机器人放置于待检测的水域;
步骤2)路径规划阶段:根据实际设计需要,将每个多功能海域探测机器人规划运动路径、位于待测水域的目标深度,其中规划运动路径为初步规划路径;
步骤3)待测水域检测阶段:通过控制每个多功能海域探测机器人的X向运动组件、Y向运动组件和Z向运动组件的工作状态,将每个多功能海域探测机器人运行至目标深度位置处,并按照规划运动路径进行运行,并完成待测水域的相应检测工作;待检测结束后,将每个海域探测机器人逐一收回。
作为上述方案的进一步优化,所述步骤3)中还包括障碍物检测,具体为:所述激光测距传感器、CMOS传感器、毫米波雷达传感器间隔设置在预设的位置处分别用于实时检测海域探测机器人与水下障碍物之间的距离信息和图像信息,并将实时检测到的信息发送至控制器;所述控制器将接收到的实时检测信息经数据转换后,首先根据激光测距传感器和毫米波传感器检测得到的水下障碍物与海域探测机器人的主检测距离信息,然后根据水下障碍物的图像信息确定水下障碍物的轮廓形状,通过图像识别软件计算得到水下障碍物与海域探测机器人的辅助检测距离信息,再将主检测距离信息与辅助检测信息所得到的距离值取平均值,并作为实时检测得到的最终值;根据最终值的大小与预设的距离值进行比较,根据比较的结果控制行走机构的工作状态;当实时检测得到的最终值小于预设的距离值时,控制器控制行走机构的X向运动组件和/或Y向运动组件和/或Z向运动组件工作以调整海域探测机器人的运动方向,反之,则不作调整;所述控制器最终值的大小与预设的距离值比较的结果通过数据通讯总线单元与相邻的多功能海域探测机器人进行信息传输及存储;其中,控制器控制行走机构的X向运动组件和/或Y向运动组件和/或Z向运动组件工作以调整海域探测机器人的运动方向具体为:
①当实时检测得到的最终值小于预设的距离值时,控制行走机构保持在当前位置不再按照预设路径行走,并请求控制器对多功能海域探测机器人的运动路径进行调整;
②控制器将GPS定位单元检测的多功能海域探测机器人的当前位置信息以及障碍物图像信息发送至远程工控机,操作人员通过远程工控机对当前遇到障碍物的多功能海域探测机器人的运动路径作相应调整,并将调整后的运动路径通过通讯组件发送至控制器;控制器再根据调整后的运动路径控制行走机构的X向运动组件和/或Y向运动组件和/或Z向运动组件的喷气调节阀工作状态以调整海域探测机器人的运动方向。
作为上述方案的进一步优化,所述步骤3)中还包括水质检测,具体为:
①根据检测需要,控制器控制储水盒进水口处的自动启闭板打开,将待测水域的水进行收集,收集后控制器控制自动启闭板关闭,完成收集水的动作,此时,利用自动启闭板边框处设置的电磁铁与所述进水口处设置的铁片相互配合用于将进水口在关闭状态下将自动启闭板进行限位,将进水口紧紧关闭;
②所述水质分析仪进行水质的分析,所述控制器将所述水质分析仪实时检测待检测区域水体的水质信息经数据转换后得到当前待测水域的水质信息,并将当前水域的水质信息通过数据通讯总线单元与相邻的多功能海域探测机器人以及远程工控机无线通讯连接进行信息传输及存储;
③待上一区域的水质分析完成后,水下探测机器人前往另一区域进行水质的采集和分析。
此外,作为多功能水下机器人,可根据具体的任务要求,携带相应的探测或搜索设备,在此不作具体限定。
采用本发明所述的一种多功能海域探测机器人及其使用方法具有如下有益效果:
(1)由于矩阵布设的方式布设在待探测深海海水区域内进行探测,能够大大提高探测效率和探测精度,大大降低了因待测水域的水流实时变化对探测要求带来的不利影响。
(2)由于海域探测机器人与相邻的海域探测机器人之间以及与远程工控机均可以通过无线通讯进行信息的传输以及存储,这样便于操作人员对实时探测结果以及相应传感器探测的结果进行存储,对于在特殊情形(例如单个多功能海域探测机器人断电或无法与远程工控机进行通讯等情形)下,也能够通过组网的方式进行通信,大大提高了整体结构在探测过程中的运行可靠性和数据信息的安全性。
(3)利用距离主检测元件和距离辅助检测元件的相互配合,能够大大提高深海作业区域多功能海域探测机器人对障碍物检测的精度以及可靠性,降低了海域探测机器人撞击到障碍物的风险。
(4)利用水质分析仪实时对待测区域水的收集和检测,提高水质检测的效率,并能实时反应当地海域的水质情况。
(5)利用三向运动组件,大大提高了水下机器人运动的响应速度;利用楔形尾翼的设计,尤其流线型的楔形尾翼结构,能够降低多功能海域探测机器人在运动过程中水对机器人本体的扰动,大大降低了流动水体影响机器人本体运动路径的偏差,辅助水下探测机器人运动方向的调节同时提高了偏航的稳定性;并且由于楔形尾翼的连接座与机器人本体内的枢转轴通过多组凹凸配合,因此可以辅助楔形尾翼摆动角度的定位,减小水流对其的不利扰动。
(6)喷气式气动结构以及履带式车轮组件的设计,不仅能够满足深海待测水域的运动控制,还能够在浅海水域进行海底探测,能够实现多功能海域探测机器人的功能多样性需求。
附图说明
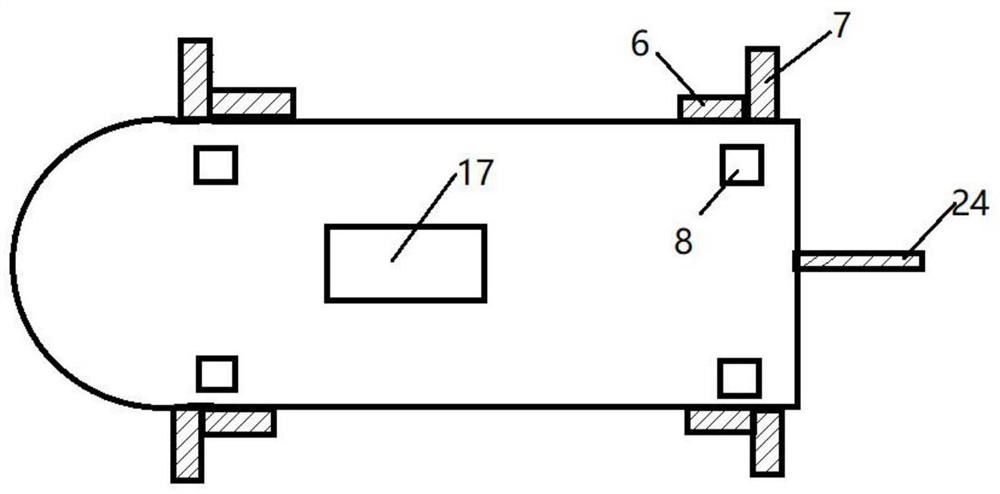
图1为本发明多功能海域探测机器人的结构示意图。
图2为图1中多功能海域探测机器人的俯视图。
图3为多个机器人矩阵布设示意图。
图4为本发明尾翼连接座的示意图。
图5为本发明铰链装配处的截面图。
图6为本发明自动收集器的结构示意图。
图7为本发明自动控制系统的结构示意图。
具体实施方式
下面结合图1-7对本发明一种多功能海域探测机器人及其使用方法作以详细说明。
如图1-3所示,一种多功能海域探测机器人1,其用于海域探测,并且所述多功能海域探测机器人1以矩阵布设的方式布设在待探测海域2海水区域内进行探测;所述多功能海域探测机器人包括机器人本体3、行走机构4、照明机构5、自动控制系统;其中,机器人本体上设置有用于安装行走机构和照明机构的行走机构安装部、照明机构安装部;所述行走机构包括对称设置在机器人本体左右两侧并位于前端和尾端的运动组件,即所述运动组件一共具有4组,每组所述运动组件包括一个X向运动组件6、一个Y向运动组件7和两个Z向运动组件8;所述X向运动组件横向安装在所述机器人本体结构一侧的端部,用于海域探测机器人的X向水平运动;所述Y向运动组件与所述X向运动组件位于机器人本体同一侧,并与X向运动组件垂直且位于同一水平面上,用于海域探测机器人的Y向水平运动;所述Z向运动组件为两个,分别控制+Z向和-Z向的运动;所述Z向运动组件安装在垂直于X向运动组件与Y向运动组件所在的水平面的竖直平面上;所述的矩阵布设的方式按照2×2、3×3……N×N的矩阵布设方式进行布设,其中N≥2,且为整数。通过以矩阵方式运行的机器人能够提高海域探测或搜索的覆盖面积,并且能够实现地毯式搜索,提高探测和搜索的准确性及效率。
参见图7,所述自动控制系统包括:控制器、传感器组件、通信组件、远程工控机12;所述传感器组件与控制器数据信号连接;所述控制器通过通信组件与相邻的海域探测机器人及远程工控机通信连接;所述控制器包括数据处理单元、数据通讯总线单元、数据串口通讯单元、GPS定位单元、驱动电路单元、计时器单元;所述数据通讯总线单元分别与数据处理单元、数据串口通讯单元、GPS定位单元、驱动电路单元、计时器单元电连接;所述驱动电路单元与行走机构驱动连接;所述数据通讯总线单元还与相邻的海域探测机器人的数据通讯总线单元、以及远程工控机无线通讯连接。
所述传感器组件安装在机器人本体的前方、左侧前端、左侧中央、左侧后端、右侧前端、右侧中央、右侧后端及后方;每个所述传感器组件包括激光测距传感器13、CMOS传感器14、毫米波雷达传感器15;所述激光测距传感器13和毫米波雷达传感器15作为距离检测主要元件;所述CMOS传感器14作为距离检测辅助元件;所述激光测距传感器13、CMOS传感器14、毫米波雷达传感器15间隔设置在预设的位置处分别用于实时检测海域探测机器人与相邻的海域探测机器人之间的距离,从而保证以组网方式运行的多个机器人能够以矩阵的布设方式运行。所述激光测距传感器13、CMOS传感器14、毫米波雷达传感器15还能够用于实时检测海域探测机器人与水下障碍物之间的距离信息和图像信息,并将实时检测到的信息发送至控制器;所述控制器将接收到的实时检测信息经数据转换后,首先根据激光测距传感器和毫米波传感器检测得到的水下障碍物与海域探测机器人的主检测距离信息,然后根据水下障碍物的图像信息确定水下障碍物的轮廓形状,通过图像识别软件计算得到水下障碍物与海域探测机器人的辅助检测距离信息,再将主检测距离信息与辅助检测信息所得到的距离值取平均值,并作为实时检测得到的最终值;根据最终值的大小与预设的距离值进行比较,根据比较的结果控制行走机构的工作状态;当实时检测得到的最终值小于预设的距离值时,控制器控制行走机构的X向运动组件和/或Y向运动组件和/或Z向运动组件工作以调整海域探测机器人的运动方向,反之,则不作调整。
参见图1、图6,所述机器人本体上还设置有用于收集当前待测区域内水的自动收集容器17;所述自动收集器17包括储水盒18、设置于储水盒内的水质分析仪19、设置于储水盒上的进水口20和出水口21;所述水质分析仪19与控制器数据信号连接用于实时检测储水盒内的水质情况,并将实时检测的水质信息发送至控制器;所述进水口和出水口上设置有自动启闭板22;所述控制器与自动启闭板22控制连接;所述储水盒的进水口和出水口处设置有与自动启闭板形状相适配的导向滑道;所述自动启闭板滑动设置于进水口和出水口处用于自动打开和关闭进水口和出水口;所述自动启闭板的边框处还设置有电磁铁;所述进水口和出水口处还设置有与电磁铁相互配合的铁片用于将进水口和出水口在关闭状态下将自动启闭板进行限位。通过上述设置,水下探测机器人可以实时检测某一海域的水质情况,并传送至远程控制器进行记录,在水质分析的这段时间内,水下探测机器人仍可继续向前运动。待上一区域的水质分析完成后,水下探测机器人前往另一区域进行水质的采集和分析,只需相应的控制进水口和出水口的开闭即可。上述水质分析包括但不限于PH值分析、浓度分析及溶解物分析等。
参见图1-2,所述机器人本体上还设置有楔形尾翼24,所述楔形尾翼通过铰链25设置于机器人本体的后侧中央位置处,所述楔形尾翼的转动角度为0-180°,其转动通过致动器进行致动。参见图4-5,所述铰链25包括机器人本体内的枢转轴26,以及与枢转轴铰接的尾翼连接座27;所述尾翼连接座27上设置有若干个楔形尾翼安装孔28、楔形尾翼调节孔29,用于方便地安装或拆卸楔形尾翼;所述枢转轴26的外周面上间隔设置若干个沿枢转轴轴线方向布设的弧形凸起30;所述尾翼连接座27内壁设有若干组相互平行且与所述弧形凸起相配合的弧形凹槽31,通过旋转楔形尾翼,呈直线布设的弧形凸起能够分别与呈直线布设的弧形凹槽相互配合,用于楔形尾翼的转动角度调节限位;所述楔形尾翼还包括垂直设置在尾翼连接座上的楔形板,所述楔形板的两侧边为流线型。通过楔形尾翼的设置,可以辅助水下探测机器人运动方向的调节以及提高偏航的稳定性,并且由于楔形尾翼的连接座与机器人本体内的枢转轴通过多组凹凸配合,因此可以辅助楔形尾翼摆动角度的定位,减小水流对其的不利扰动。
所述X向运动组件、Y向运动组件和Z向运动组件为喷气式气动结构;所述喷气式气动结构包括气体发生器、气泵、喷嘴、喷气调节阀;所述气泵设置于行走机构安装部上,所述喷嘴通过喷气调节阀与气泵连接;所述控制器与喷气调节阀控制连接。作为另一种替代实施例,所述X向运动组件、Y向运动组件和Z向运动组件还可以为喷水式结构,相应的设置水泵即可。或者作为另一种优选实施例,所述X向运动组件、Y向运动组件和Z向运动组件也可以是推进桨等形式,以实现三向的运动控制即可。所述行走机构还包括履带式车轮组件;所述履带式车轮组件设置于机器人本体的前后两侧底部;所述履带式车轮组件包括电机、传动轮、履带轮和履带,所述电机的输出轴经过传动轮与履带轮连接,所述履带套设与履带轮上。
本发明所述的多功能海域探测机器人的使用方法包括如下步骤:
步骤1)准备阶段:根据实际使用需要,确定多功能海域探测机器人的数量,并将确定后多功能海域探测机器人的数量按照2×2、3×3……N×N的矩阵布设方式进行布设,其中N≥2,且为整数;并将多功能海域探测机器人放置于待检测的水域;
步骤2)路径规划阶段:根据实际设计需要,将每个多功能海域探测机器人规划运动路径、位于待测水域的目标深度,其中规划运动路径为初步规划路径;
步骤3)待测水域检测阶段:通过控制每个多功能海域探测机器人的X向运动组件、Y向运动组件和Z向运动组件的工作状态,将每个多功能海域探测机器人运行至目标深度位置处,并按照规划运动路径进行运行,并完成待测水域的相应检测工作;待检测结束后,将每个海域探测机器人逐一收回。
所述步骤3)中还包括障碍物检测,具体为:所述激光测距传感器、CMOS传感器、毫米波雷达传感器间隔设置在预设的位置处分别用于实时检测海域探测机器人与水下障碍物之间的距离信息和图像信息,并将实时检测到的信息发送至控制器;所述控制器将接收到的实时检测信息经数据转换后,首先根据激光测距传感器和毫米波传感器检测得到的水下障碍物与海域探测机器人的主检测距离信息,然后根据水下障碍物的图像信息确定水下障碍物的轮廓形状,通过图像识别软件计算得到水下障碍物与海域探测机器人的辅助检测距离信息,再将主检测距离信息与辅助检测信息所得到的距离值取平均值,并作为实时检测得到的最终值;根据最终值的大小与预设的距离值进行比较,根据比较的结果控制行走机构的工作状态;当实时检测得到的最终值小于预设的距离值时,控制器控制行走机构的X向运动组件和/或Y向运动组件和/或Z向运动组件工作以调整海域探测机器人的运动方向,反之,则不作调整;所述控制器最终值的大小与预设的距离值比较的结果通过数据通讯总线单元与相邻的多功能海域探测机器人进行信息传输及存储;其中,控制器控制行走机构的X向运动组件和/或Y向运动组件和/或Z向运动组件工作以调整海域探测机器人的运动方向具体为:
①当实时检测得到的最终值小于预设的距离值时,控制行走机构保持在当前位置不再按照预设路径行走,并请求控制器对多功能海域探测机器人的运动路径进行调整;
②控制器将GPS定位单元检测的多功能海域探测机器人的当前位置信息以及障碍物图像信息发送至远程工控机,操作人员通过远程工控机对当前遇到障碍物的多功能海域探测机器人的运动路径作相应调整,并将调整后的运动路径通过通讯组件发送至控制器;控制器再根据调整后的运动路径控制行走机构的X向运动组件和/或Y向运动组件和/或Z向运动组件的喷气调节阀工作状态以调整海域探测机器人的运动方向。
所述步骤3)中还包括水质检测,具体为:
①根据检测需要,控制器控制储水盒进水口处的自动启闭板打开,将待测水域的水进行收集,收集后控制器控制自动启闭板关闭,完成收集水的动作,此时,利用自动启闭板边框处设置的电磁铁与所述进水口处设置的铁片相互配合用于将进水口在关闭状态下将自动启闭板进行限位,将进水口紧紧关闭;
②所述水质分析仪进行水质的分析,所述控制器将所述水质分析仪实时检测待检测区域水体的水质信息经数据转换后得到当前待测水域的水质信息,并将当前水域的水质信息通过数据通讯总线单元与相邻的多功能海域探测机器人以及远程工控机无线通讯连接进行信息传输及存储;
③待上一区域的水质分析完成后,水下探测机器人前往另一区域进行水质的采集和分析。
本发明多功能海域探测机器人可以采用有缆绳和无缆绳两种类型,具体需要根据使用数量及使用要求进行选择,在此不作特殊限定;对于水下探测机器人在水中的升降可通过压载舱等方式实现,均作为现有技术,在此不作特殊限定,但可以理解,由于本发明使用了Z向运动组件控制水下机器人的升降运动,因此能够迅速提高机器人运动的响应速度。对于每个多功能海域探测机器人控制器中各数据处理单元、数据通讯总线单元、数据串口通讯单元、GPS定位单元、驱动电路单元、计时器单元的选型也均属于常见的单元选型;根据水下障碍物的图像信息确定水下障碍物的轮廓形状,通过图像识别软件计算得到水下障碍物与海域探测机器人的辅助检测距离信息中图像信息分析处理的手段也可采用现有技术中的视觉识别方式;供电装置采用铅酸电池、银锌电池、镍锰电池、锂电池等等,具体根据实际设计及使用需要进行选择。本发明各不同类型的传感器选型方面,均可以采用现有技术中常见的传感器种类,在此不作特殊限定;需要指出的是:由于使用中,可能需要在深海区域或者浅海区域进行工作,因而该类型的传感器、电池等结构均需要作防水、抗压处理。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 一种多功能海域探测机器人及其使用方法
- 一种自主探测定位及精准灭火机器人系统及使用方法