辅助站立康养移动机器人
文献发布时间:2023-06-19 10:18:07
技术领域
本发明涉及康养机器人技术领域,具体是一种辅助站立康养移动机器人。
背景技术
随着我国老龄化程度的不断加深,下肢失能的老人数量不断增加,半失能老人进行康复训练及辅助行走的问题,使得人们对康复机器人的需求越来越明显。同时,我国也不断加大对康复助老机器人的科研支持与资金投入,这使得对康养助老机器人的研究越来越受到科研工作者的重视。因此,设计一款能够辅助半失能用户进行坐姿与站姿切换的康养机器人,有助于半失能人员进行康复训练,恢复身体机能。
发明内容
针对现有技术的不足,本发明拟解决的技术问题是,提供一种辅助站立康养移动机器人。
本发明解决所述技术问题的技术方案是:
一种辅助站立康养移动机器人,包括机架、站立装置、可调节腋下支撑装置和可调节膝盖固定装置;其特征在于,通过电动推杆推动座板使其由水平转到竖直状态,同时通过平行四边形结构带动背部支撑板一直保持竖直状态移动,实现坐姿与站姿之间的转换;可调节腋下支撑装置安装在背部支撑板的两侧,调整到合适位置闭合装置,使装置固定住用户的肩部,在起立的过程中给人体提供重要的支撑力;可调节膝盖固定装置安装在机架的底部支撑板的前端,当机器人处于未使用状态时,膝盖固定装置分别转到两侧不妨碍用户的进出,当机器人处于使用状态,装置回转并通过升降伸缩调整固定住用户膝盖。
所述站立装置包括站立电动推杆、固定连接杆、站立连接杆、座板、背部支撑板和底部支撑板;所述底部支撑板与座板一端铰接,座板另一端与背部支撑板铰接;站立电动推杆的伸缩杆的末端与座板中部铰接,站立电动推杆的缸筒与机架铰接;底部支撑板和固定连接杆均固定在机架的前端,其中固定连接杆的下端固定在底部支撑板上;固定连接杆的上端与站立连接杆的一端铰接,站立连接杆的另一端与背部支撑板的中部铰接,从而形成平行四边形结构,当电动推杆推动座板由水平到竖直位置时,通过平行四边形结构带动背部支撑板移动,从而底部支撑板、座板及背部支撑板形成一条直线,使用户完成站立。
所述可调节腋下支撑装置包括腋下支撑底部模块、腋下支撑顶部模块、纵向滑轨、横向滑轨、滑块;所述的可调节腋下支撑模块固定于机器人背部支撑板的两侧,可调节腋下支撑模块采用双导轨双滑块结构,可根据用户身材使装置上下左右进行微调,更加符合人机工程学。支撑部分采用上下两部分可分离结构设计,通过双滑块结构支撑部分能够调整到人体适宜位置,底部支撑模块固定住用户肩部,顶部支撑模块回转与底部支撑模块闭合,实现肩部的完全固定,给使人体提供支撑的同时,最大程度的保证用户的安全。
所述可调节膝盖固定装置包括固定膝盖板、垫板、前滑动轴、一号伸缩杆、二号伸缩杆、丝杠轴、平台、前滑动块、后滑动块、电机、上丝杠座、下丝杠座、滑块、导轨、一号板、二号板、90度限位块、连接件及连接板;所述连接板固定在机架上;90度限位块与连接板铰接,使膝盖固定装置能够完成90度转动,另一端固连在二号板上;二号板另一端与导轨固定连接;滑块与导轨连接,另一端固定在一号板上,使膝盖固定装置实现上下调整;丝杠轴的两端分别通过下丝杠座和上丝杠座安装在一号板上,丝杠轴与两个丝杠座连接;电机固定在一号板上,电机的输出轴通过联轴器与丝杠轴的一端固连;丝杠轴上具有螺纹,后滑动块安装在丝杠轴的螺纹部分;一号伸缩杆的下端铰接在后滑动块上,上端与垫板的上部铰接;二号伸缩杆的上端铰接在上丝杠座上,下端与前滑动块铰接,二号伸缩杆与一号伸缩杆在中部剪叉;前滑动块安装在前滑动轴上,前滑动轴与垫板固定连接;垫板及膝盖固定板通过连接件固定连接;电机带动丝杠轴转动,使后滑动块在丝杠轴上往复滑动,被动带动前滑动块在前滑动轴上滑动,实现垫板及膝盖固定板的前后位置调整。当机器人处于工作状态时,膝盖固定装置调整到合适尺寸从而固定住用户膝盖。
与现有技术相比,本发明有益效果在于:
(1)本发明通过电动推杆与平行四边形的带动结构实现机器人由坐姿到站姿的姿态切换,结构简单,减少动力元件,环保节约,同时四边形结构可以作为坐姿状态下的扶手,增加安全性。
(2)本发明采用腋下支撑的方式为用户提供支撑力,结构简单的同时,将用户肩部完全固定,不存在跌落风险,安全性进一步提高。
(3)现有采用腋下支撑的康养机器人需要用户费尽力气主动抓住机器人才能使人体实现站立状态,而本发明采用机器人在坐立转换中带动人体实现起立。
(4)本发明采用模块化设计,同时本发明的腋下支撑装置及膝盖固定装置具有全方位可调节性,适用于广泛的用户群体,同时最大程度上增加舒适性及可靠性,符合人机工程学。
附图说明
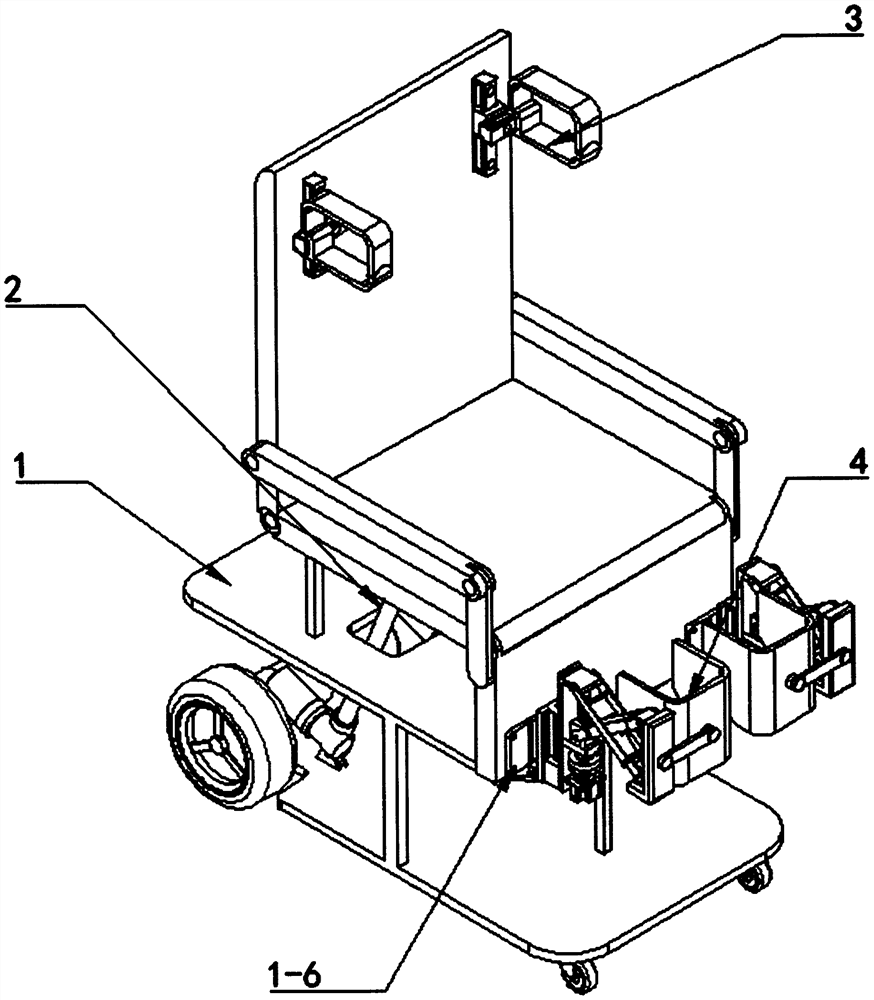
图1为本发明的机器人处于坐姿状态时的结构示意图;
图2为本发明的站立装置的结构示意图;
图3为本发明的可调节腋下支撑装置的结构示意图;
图4为本发明的可调节膝盖固定装置的结构示意图;
图5为本发明的机器人处于未工作坐姿状态时的结构示意图
图6为本发明的机器人处于站姿状态时的结构示意图;
图中:1-机架;2-站立装置;3-可调节腋下支撑装置;4-可调节膝盖固定装置;
1-1、坐姿支撑杆;1-2、机架上板;1-3、脚部支撑板;1-4、固定连接杆;1-5、底部支撑板;1-6、连接板;
2-1、背部支撑板;2-2、座板;2-3、连接杆;2-4、站立电动推杆;
3-1、纵向导轨;3-2、滑块1;3-3、横向导轨;3-4、滑块腋下支撑底部;3-5、腋下支撑顶部;
4-1、垫板;4-2、前滑动轴;4-3、一号伸缩杆;4-4、二号伸缩杆;4-5、丝杠轴;4-6、一号板;4-7、后滑动块;4-8、前滑动块;4-9、电机;4-10、下丝杠座;4-11、上丝杠座;4-12、滑块;4-13、导轨;4-14、二号板;4-15、90度限位块;4-16、连接件;4-17、膝盖固定板;
具体实施方式
下面结合实施例及附图对本发明作进一步说明。具体实施例仅用于进一步详细说明本发明,不限制本申请权力要求的保护范围。
本发明提供了一种辅助站立康养移动机器人(简称机器人,参见图1-6),包括机架1、站立装置2、可调节膝盖固定装置3和可调节腋下支撑装置4;
所述机架1包括坐姿支撑杆1-1、机架上板1-2、脚部支撑板1-3、固定连接杆1-4、底部支撑板1-5、连接板1-6;坐姿支撑杆1-1及底部支撑板1-5与脚部支撑板1-2固定连接,固定连接杆1-4及连接板1-6与底部支撑板1-5固定连接;站立装置2通过各种零件与机架1相连;可调节膝盖固定装置3通过连接板安装在机架1的底部支撑板1-5两侧;可调节腋下支撑装置4安装在与机架1相连的站立装置2的背部支撑板2-1两侧。
所述站立装置2包括背部支撑板2-1;座板2-2;连接杆2-3;站立电动推杆2-4;
所述座板2-2的两侧分别与机架1的底部支撑板1-5及背部支撑板2-1相连,座板2-2的后部与站立电动推杆2-4铰接,站立电动推杆2-4另一端与机架1的脚部支撑板1-3铰接;连接杆2-3一端与机架1的固定连接杆1-4铰接,另一端与背部支撑板2-1一端铰接,从而与固定连接杆1-4、座板2-2及背部支撑板2-1形成平行四边形,当站立电动推杆2-4推动座板2-2由水平转到竖直状态时,通过平行四边形机构带动背部支撑板2-1实现所需位置移动,使得底部支撑板1-5、座板2-2及背部支撑板2-1连成一条直线,实现用户站立状态。
所述可调节腋下支撑装置3包括纵向导轨3-1、滑块3-2、横向导轨3-3、滑块腋下支撑底部3-4、腋下支撑顶部3-5;
所述纵向导轨3-1固定在站立装置2的背部支撑板2-1的两端,滑块3-2与纵向导轨3-1连接,实现腋下支撑模块的上下调节;横向导轨3-3与滑块3-2固定连接;滑块腋下支撑底部3-4与横向导轨3-3连接,实现腋下支撑模块的左右调节;腋下支撑顶部3-5一端与滑块腋下支撑底部3-4一端铰接,当机器人处于未工作状态时,腋下支撑顶部3-5与腋下支撑底部3-4处于分离状态,当机器人处于工作状态时,腋下支撑顶部3-5与腋下支撑底部3-4处于闭合状态,固定住人体肩关节。
所述可调节膝盖固定装置4装置包括垫板4-1、前滑动轴4-2、一号伸缩杆4-3、二号伸缩杆4-4、丝杠轴4-5、一号板4-6、后滑动块4-7、前滑动块4-8、电机4-9、下丝杠座4-10、上丝杠座4-11、滑块4-12、导轨4-13、二号板4-14、90度限位块4-15、连接件4-16、膝盖固定板4-17;
所述90度限位块4-15与机架1的连接板1-6铰接,使膝盖固定装置能够完成90度转动,另一端固连在二号板4-14上;二号板4-14另一端与导轨4-13固定连接;滑块4-12与导轨4-13连接,另一端固定在一号板4-6上,使膝盖固定装置实现上下调整;丝杠轴4-5的两端分别通过下丝杠座4-10和上丝杠座4-11安装在一号板4-6上,丝杠轴4-5与两个丝杠座连接;电机4-9固定在一号板4-6上,电机4-9的输出轴通过联轴器与丝杠轴4-5的一端固连;丝杠轴4-5上具有螺纹,后滑动块4-7安装在丝杠轴4-5的螺纹部分;一号伸缩杆4-3的下端铰接在后滑动块4-7上,上端与垫板4-1的上部铰接;二号伸缩杆4-4的上端铰接在上丝杠座4-11上,下端与前滑动块4-8铰接,二号伸缩杆4-4与一号伸缩杆4-3在中部剪叉;前滑动块4-8安装在前滑动轴4-2上,前滑动轴4-2与垫板4-1的固定连接;垫板4-1及膝盖固定板4-17通过连接件4-16固定连接;电机4-9带动丝杠轴4-5转动,使后滑动块4-7在丝杠轴4-5上往复滑动,被动带动前滑动块4-8在前滑动轴4-2上滑动,实现垫板4-1及膝盖固定板4-17的前后位置调整。
本发明的工作原理和工作过程是:
机器人处于未工作状态时(如图5所示),膝盖固定装置4分别转向底部支撑板1-5外侧,不影响用户的使用,腋下支撑装置3的腋下支撑顶部3-5与腋下支撑底部3-4处于分离状态;机器人处于工作状态时(如图1所示),使用者坐在座板2-2上,同时把脚放在脚部支撑板1-3上,背部靠在背部支撑板2-1上。用户调整好姿势,膝盖固定装置4向内转90度,通过滑块4-12与导轨4-13滑动连接,使膝盖固定装置实现上下尺寸调整;电机4-9带动丝杠轴4-5转动,使后滑动块4-7在丝杠轴4-5上往复滑动,被动带动前滑动块4-8在前滑动轴4-2上滑动,实现垫板4-1及膝盖固定板4-17的前后位置调整,完成用户膝盖部位的完全固定。膝盖固定完成,上下左右调整腋下支撑装置3到适当位置,两侧腋下支撑底部3-4卡住用户肩关节,腋下支撑顶部3-5回转与腋下支撑底部3-4闭合,从而完全固定住用户肩关节。
当用户由坐姿切换为站姿时,站立电动推杆2-4的伸缩杆拉伸推动座板2-2由水平转到竖直位置,通过固定连接杆1-4、连接杆2-3、背部支撑板2-1及座板2-2组成的平行四边形结构带动背部支撑板2-1移动,从而底部支撑板1-5、座板2-2及背部支撑板2-1形成一条直线,膝盖固定装置4固定住用户膝盖使人体的骨骼承担一部分支撑力,同时背部支撑板2-1两侧的腋下支撑装置3给用户提供向上的人体支撑力,使用户完成站立(如图6所示)。
当用户由站姿切换为坐姿时,站立电动推杆的伸缩杆收缩,带动座板2-2由竖直状态回转到水平状态,从而人体的重心逐步落到座板2-2上,机架1上的坐姿支撑杆1-1为座板2-2提供支撑力,并承担用户坐姿状态的大部分力;同时,固定连接杆1-4、连接杆2-3、背部支撑板2-1及座板2-2变回矩形形态,其中连接杆2-3成为坐姿状态下的扶手,并带动背部支撑板2-1退回到起始位置。
- 辅助站立康养移动机器人
- 一种智能康养舱及智能康养系统