一种基于水槽的吸收式造波装置及其方法
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及一种基于水槽的吸收式造波装置及其方法,属于实验水槽中波浪模拟技术研究技术领域。
背景技术
波浪是海洋工程研究中的重要对象,研究波浪对工程结构物的作用可以为海洋工程设计提供重要的技术参数。造波机具备在有限空间内模拟海洋波浪的能力,其造波功率大小直接决定了波浪大小,吸收装置使得造波机具备二次反射波吸收能力。大型吸收式造波机可以提供长时间的大波高造波能力,因此广泛应用于波浪的传播模拟研究、波浪与海岸工程建筑物的作用、船舶在波浪作用下的运动研究、海洋油气平台开发研究、波浪与水流的相互作用研究、疏浚技术装备研究等。
很多的水槽造波机没有吸收式造波装置、系统鲁棒性差、控制精度低,不能制造高精度、大波高波浪,无法满足长时间的造波要求,在出现异常情况时难以恢复到正常实验状态,因而难以开展更高要求的波浪研究。
发明内容
为了克服现有技术中存在的不足,本发明目的是提供一种基于水槽的吸收式造波装置及其方法。该造波装置采用基于PC的软控制器进行控制,控制器软件和造波软件在同一台PC上,分别运行在实时核和用户核上,使得控制效率、精度、稳定性大大提升。采用大功率伺服电机通过连轴丝杠和滑台连接,滑台连接造波板,每个造波板前配置浪高仪,伺服电机转动转换为造波板的前、后移动,进而可以产生大波高波浪,板前浪高仪实时采集波浪数据作为前馈信号输入到控制器,使得造波机具有实时、精确的吸收能力。
为了实现上述发明目的,解决现有技术存在的问题,本发明采取的技术方案是:一种基于水槽的吸收式造波装置的造波方法,所述的造波装置,包括运动控制部分及水槽部分,所述运动控制部分,包括造波机控制台及造波机控制柜,所述造波机控制台设置有采集浪高仪、A/D转换接口及控制器,所述采集浪高仪输出端与A/D转换接口输入端相连、所述A/D转换接口输出端与控制器输入端相连,所述造波机控制柜设置有第1、2、3驱动器,第1、2、3伺服电机,第1、2、3冷却风扇及第1、2、3温度传感器,所述控制器输出端分别与第1驱动器输入端、第2驱动器输入端及第3驱动器输入端相连,所述第1驱动器输出端分别与第1伺服电机输入端、第1冷却风扇控制端及第1温度传感器输入端相连,所述第2驱动器输出端分别与第2伺服电机输入端、第2冷却风扇控制端及第2温度传感器输入端相连,所述第3驱动器输出端分别与第3伺服电机输入端、第3冷却风扇控制端及第3温度传感器输入端相连;所述水槽部分设置有第1、2、3机械滑台,第1、2、3正限位传感器,第1、2、3造波板,第1、2、3负限位传感器及第1、2、3板前浪高仪;所述第1伺服电机输出端通过第1连轴丝杠与第1机械滑台输入端相连,第1机械滑台第1输出端与第1负限位传感器输入端相连,第1机械滑台第2输出端与第1造波板输入端相连,第1机械滑台第3输出端与第1正限位传感器输入端相连;所述第1造波板输出端与第1板前浪高仪输入端相连,所述第1板前浪高仪输出端、第1正限位传感器输出端及第1负限位传感器输出端相连后与第1驱动器输入端相连;所述第2伺服电机输出端通过第2连轴丝杠与第2机械滑台输入端相连,第2机械滑台第1输出端与第2负限位传感器输入端相连,第2机械滑台第2输出端与第2造波板输入端相连,第2机械滑台第3输出端与第2正限位传感器输入端相连;所述第2造波板输出端与第2板前浪高仪输入端相连,所述第2板前浪高仪输出端、第2正限位传感器输出端及第2负限位传感器输出端相连后与第2驱动器输入端相连;所述第3伺服电机输出端通过第3连轴丝杠与第3机械滑台输入端相连,第3机械滑台第1输出端与第3负限位传感器输入端相连,第3机械滑台第2输出端与第3造波板输入端相连,第3机械滑台第3输出端与第3正限位传感器输入端相连;所述第3造波板输出端与第3板前浪高仪输入端相连,所述第3板前浪高仪输出端、第3正限位传感器输出端及第3负限位传感器输出端相连后与第3驱动器输入端相连;
其中,所述的造波方法,包括以下步骤:
步骤1、系统初始化,包括运动控制系统初始化及造波软件初始化,运动控制系统初始化,包括控制器上电、控制器软件自动运行、第1、2、3驱动器上电、第1、2、3驱动器读取固件信息自动配置、控制器软件与第1、2、3驱动器建立连接、读取第1、2、3温度传感器信号、读取第1、2、3正限位传感器信号、读取第1、2、3负限位传感器信号、等待造波连接;造波软件初始化,包括控制器软件状态监测、与控制器软件建立连接、第1、2、3伺服电机状态检测、第1、2、3驱动器状态检测、标定文件读取;初始化无异常则进入就绪状态,否则软件会提示出现异常以及异常类型,如果是网络异常则自动清除故障并重连,其他类型异常需要根据异常类型进行相应操作;
步骤2、凑谱,根据实验需求选择波浪类型并输入相应参数,软件在实验人员所选路径下根据相应造波算法依次生成波面文件、吸收参数文件、第1、2、3伺服电机轴运动文件及造波参数头文件;
步骤3、造波文件选择,造波软件将实验人员所选造波文件发送到磁盘固定位置,为了减小凑谱时间,凑谱文件波列数据时间间隔大,难以满足控制精度要求,因此控制器对波列数据进行插值处理;控制器从固定位置读取造波文件并插值,通过公式(1)进行描述,
S
式中,S
步骤4、使能,在对第1、2、3伺服电机进行运动控制前,必须对第1、2、3伺服电机进行使能,否则会提示“伺服电机未使能无法进行运动控制”,通过操作界面随时查询第1、2、3伺服电机使能状态;使能之后对第1、2、3伺服电机进行匀速移动以检测运动控制系统是否正常;控制器软件监测到使能信号,立即进行使能操作,并恢复使能信号;使能结束后,向控制器反馈结果,进入就绪状态,如果使能异常,会提示异常类型;
步骤5、寻零,在第一次造波前必须寻零,否则无法进行造波操作,造波软件向控制器发送寻零指令,控制器接收到寻零指令,立即转移状态为寻零状态,锁定造波软件窗口并提示造波软件正在寻零,需要等待寻零结束后才能进行下一步操作;控制器每隔4ms读取第1、2、3伺服电机多圈绝对值编码器的值,与第1、2、3机械滑台零位位置进行做差计算,反复10次,计算平均值;之后以速度V
步骤6、造波,控制器接收实验人员发送的造波指令,首先读取凑谱文件中的造波参数头文件,获取波浪类型及波浪周期参数;根据造波参数头文件中的波浪周期进行动态缓启,缓启时间为波浪周期的3倍,缓启方式为S型缓启;缓启结束后,采用外部位置发生器方式进行造波,采用乒乓数组读取造波文件中数据,进行无限长时间的造波;吸收式造波时,读取造波控制软件发送的第1、2、3板前浪高仪标定数据,并读取第1、2、3造波板前波浪涌高作为前馈输入获取新的第1、2、3伺服电机轴的位置值,进行吸收式造波;
步骤7、异常监测,控制器刷新周期为4ms,每次刷新周期内,读取第1、2、3伺服电机的编码器值判断是否触发软件限位、读取第1、2、3正限位传感器、第1、2、3负限位传感器判断是否触发硬件限位、读取第1、2、3驱动器状态判断第1、2、3伺服电机是否发生异常、读取第1、2、3温度传感器信号值判断是否温度过高;如果某台伺服电机轴触发异常,该台伺服电机轴立即停止,其余伺服电机轴正常停止;如果某台伺服电机轴温度高于第一阈值,则提示实验人员、打开第1、2、3冷却风扇并触发异常指示灯,如果温度高于第二阈值,则提示实验人员并立即停止所有伺服电机轴,直到所有伺服电机温度低于第一阈值才关闭第1、2、3冷却风扇;
步骤8、数据实时采集分析处理,在造波过程中,造波软件负责采集波浪数据,实验人员根据实验需要,随时点击“开始采集”按钮,停止采集有两种方式选择,一种点击“停止采集”按钮,另一种是根据设定的采样时间或采样点数,采集完成后,自动停止采集,并保存数据,进行数据处理,显示统计分析和频谱分析结果;
步骤9、停止造波,停止造波方式有两种,一种是人工点击“停止造波”按钮,另一种是根据设定数据采集完成后,自动停止造波,不管哪种方式,当下位机收到停止造波指令后,都会进入渐停软件,平稳地停到第1、2、3机械滑台零位位置;
步骤10、波谱修正,根据采集数据处理结果,用理论数据和实测数据进行比较,用理论频谱图和实测频谱图进行比较,确定是否进行波谱修正,如果选择波谱修正,则软件自动根据实测数据对控制数据进行波谱修正,修正后的数据存储至文件,按实验要求反复执行步骤6-9,直至结果满足要求。
本发明的有益效果是:一种基于水槽的吸收式造波装置及其方法,其中造波装置,包括运动控制部分及水槽部分,所述运动控制部分,设置有造波机控制台及造波机控制柜。所述水槽部分,设置有第1、2、3机械滑台,第1、2、3正限位传感器,第1、2、3造波板,第1、2、3负限位传感器及第1、2、3板前浪高仪。其中,造波方法包括以下步骤:(1)系统初始化,(2)凑谱,(3)造波文件选择,(4)使能,(5)寻零,(6)造波,(7)异常监测,(8)数据实时采集分析处理,(9)停止造波,(10)波谱修正。与已有技术相比,该发明可以在大型水槽中实现吸收式造波功能,系统具有很强的鲁棒性、精确性及稳定性。
附图说明
图1是本发明装置原理框图。
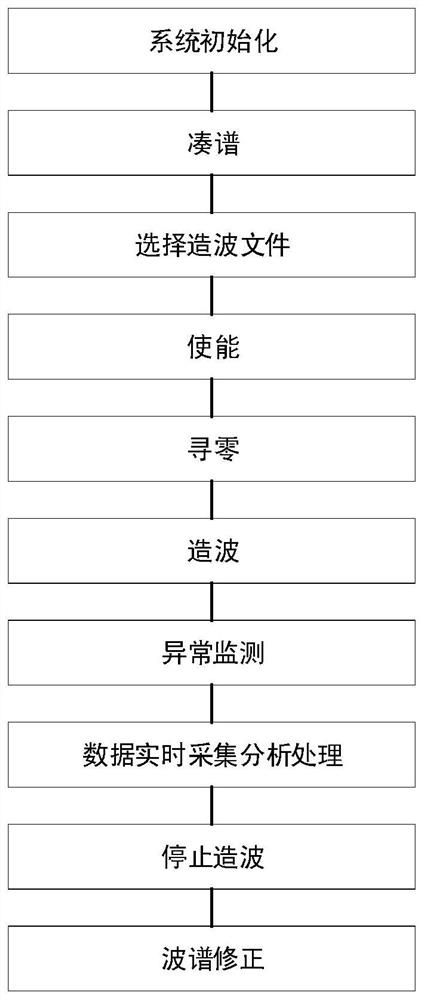
图2是本发明方法步骤流程图。
图3是本发明状态转移流程图。
图4是本发明插值原理流程图。
具体实施方式
如图1所示,一种基于水槽的吸收式造波装置,包括运动控制部分及水槽部分,所述运动控制部分,包括造波机控制台及造波机控制柜,所述造波机控制台设置有采集浪高仪、A/D转换接口及控制器,所述采集浪高仪输出端与A/D转换接口输入端相连、所述A/D转换接口输出端与控制器输入端相连,所述造波机控制柜设置有第1、2、3驱动器,第1、2、3伺服电机,第1、2、3冷却风扇及第1、2、3温度传感器,所述控制器输出端分别与第1驱动器输入端、第2驱动器输入端及第3驱动器输入端相连,所述第1驱动器输出端分别与第1伺服电机输入端、第1冷却风扇控制端及第1温度传感器输入端相连,所述第2驱动器输出端分别与第2伺服电机输入端、第2冷却风扇控制端及第2温度传感器输入端相连,所述第3驱动器输出端分别与第3伺服电机输入端、第3冷却风扇控制端及第3温度传感器输入端相连;所述水槽部分设置有第1、2、3机械滑台,第1、2、3正限位传感器,第1、2、3造波板,第1、2、3负限位传感器及第1、2、3板前浪高仪;所述第1伺服电机输出端通过第1连轴丝杠与第1机械滑台输入端相连,第1机械滑台第1输出端与第1负限位传感器输入端相连,第1机械滑台第2输出端与第1造波板输入端相连,第1机械滑台第3输出端与第1正限位传感器输入端相连;所述第1造波板输出端与第1板前浪高仪输入端相连,所述第1板前浪高仪输出端、第1正限位传感器输出端及第1负限位传感器输出端相连后与第1驱动器输入端相连;所述第2伺服电机输出端通过第2连轴丝杠与第2机械滑台输入端相连,第2机械滑台第1输出端与第2负限位传感器输入端相连,第2机械滑台第2输出端与第2造波板输入端相连,第2机械滑台第3输出端与第2正限位传感器输入端相连;所述第2造波板输出端与第2板前浪高仪输入端相连,所述第2板前浪高仪输出端、第2正限位传感器输出端及第2负限位传感器输出端相连后与第2驱动器输入端相连;所述第3伺服电机输出端通过第3连轴丝杠与第3机械滑台输入端相连,第3机械滑台第1输出端与第3负限位传感器输入端相连,第3机械滑台第2输出端与第3造波板输入端相连,第3机械滑台第3输出端与第3正限位传感器输入端相连;所述第3造波板输出端与第3板前浪高仪输入端相连,所述第3板前浪高仪输出端、第3正限位传感器输出端及第3负限位传感器输出端相连后与第3驱动器输入端相连;
如图2所示,一种基于水槽的吸收式造波方法,包括以下步骤:
步骤1、系统初始化,包括运动控制系统初始化及造波软件初始化,运动控制系统初始化,包括控制器上电、控制器软件自动运行、第1、2、3驱动器上电、第1、2、3驱动器读取固件信息自动配置、控制器软件与第1、2、3驱动器建立连接、读取第1、2、3温度传感器信号、读取第1、2、3正限位传感器信号、读取第1、2、3负限位传感器信号、等待造波连接;造波软件初始化,包括控制器软件状态监测、与控制器软件建立连接、第1、2、3伺服电机状态检测、第1、2、3驱动器状态检测、标定文件读取;初始化无异常则进入就绪状态,否则软件会提示出现异常以及异常类型,如果是网络异常则自动清除故障并重连,其他类型异常需要根据异常类型进行相应操作;
步骤2、凑谱,根据实验需求选择波浪类型并输入相应参数,软件在实验人员所选路径下根据相应造波算法依次生成波面文件、吸收参数文件、第1、2、3伺服电机轴运动文件及造波参数头文件;
步骤3、造波文件选择,造波软件将实验人员所选造波文件发送到磁盘固定位置,为了减小凑谱时间,凑谱文件波列数据时间间隔大,难以满足控制精度要求,因此控制器对波列数据进行插值处理;控制器从固定位置读取造波文件并插值,通过公式(1)进行描述,
S
式中,S
步骤4、使能,在对第1、2、3伺服电机进行运动控制前,必须对第1、2、3伺服电机进行使能,否则会提示“伺服电机未使能无法进行运动控制”,通过操作界面随时查询第1、2、3伺服电机使能状态;使能之后对第1、2、3伺服电机进行匀速移动以检测运动控制系统是否正常;控制器软件监测到使能信号,立即进行使能操作,并恢复使能信号;使能结束后,向控制器反馈结果,进入就绪状态,如果使能异常,会提示异常类型;
步骤5、寻零,在第一次造波前必须寻零,否则无法进行造波操作,造波软件向控制器发送寻零指令,控制器接收到寻零指令,立即转移状态为寻零状态,锁定造波软件窗口并提示造波软件正在寻零,需要等待寻零结束后才能进行下一步操作;控制器每隔4ms读取第1、2、3伺服电机多圈绝对值编码器的值,与第1、2、3机械滑台零位位置进行做差计算,反复10次,计算平均值;之后以速度V
步骤6、造波,控制器接收实验人员发送的造波指令,首先读取凑谱文件中的造波参数头文件,获取波浪类型及波浪周期参数;根据造波参数头文件中的波浪周期进行动态缓启,缓启时间为波浪周期的3倍,缓启方式为S型缓启;缓启结束后,采用外部位置发生器方式进行造波,采用乒乓数组读取造波文件中数据,进行无限长时间的造波;吸收式造波时,读取造波控制软件发送的第1、2、3板前浪高仪标定数据,并读取第1、2、3造波板前波浪涌高作为前馈输入获取新的第1、2、3伺服电机轴的位置值,进行吸收式造波;
步骤7、异常监测,控制器刷新周期为4ms,每次刷新周期内,读取第1、2、3伺服电机的编码器值判断是否触发软件限位、读取第1、2、3正限位传感器、第1、2、3负限位传感器判断是否触发硬件限位、读取第1、2、3驱动器状态判断第1、2、3伺服电机是否发生异常、读取第1、2、3温度传感器信号值判断是否温度过高;如果某台伺服电机轴触发异常,该台伺服电机轴立即停止,其余伺服电机轴正常停止;如果某台伺服电机轴温度高于第一阈值,则提示实验人员、打开第1、2、3冷却风扇并触发异常指示灯,如果温度高于第二阈值,则提示实验人员并立即停止所有伺服电机轴,直到所有伺服电机温度低于第一阈值才关闭第1、2、3冷却风扇;
步骤8、数据实时采集分析处理,在造波过程中,造波软件负责采集波浪数据,实验人员根据实验需要,随时点击“开始采集”按钮,停止采集有两种方式选择,一种点击“停止采集”按钮,另一种是根据设定的采样时间或采样点数,采集完成后,自动停止采集,并保存数据,进行数据处理,显示统计分析和频谱分析结果;
步骤9、停止造波,停止造波方式有两种,一种是人工点击“停止造波”按钮,另一种是根据设定数据采集完成后,自动停止造波,不管哪种方式,当下位机收到停止造波指令后,都会进入渐停软件,平稳地停到第1、2、3机械滑台零位位置;
步骤10、波谱修正,根据采集数据处理结果,用理论数据和实测数据进行比较,用理论频谱图和实测频谱图进行比较,确定是否进行波谱修正,如果选择波谱修正,则软件自动根据实测数据对控制数据进行波谱修正,修正后的数据存储至文件,按实验要求反复执行步骤6-9,直至结果满足要求。
如图3所示,控制器编程采用状态机转换机制,只有一种状态生效后,才转换为下一状态,保证控制的准确性。而所有状态在发生改变后,都必然返回到就绪状态,保证系统在任何状态下都是可控的。包括以下状态转移:初始状态为initial,在此处进行一系列的初始化操作、传感器信号检测等。初始化完成后转移状态到Ready,在此处接收所有上游命令。当接收到使能命令,立即转移状态为Enable,此时开始执行使能操作,并立即转移状态到Ready。等使能操作完成后,向造波软件反馈结果;当接收到前移或后移命令,立即转移状态到Mov_fw或Mov_bk,然后转移状态到Mov_V进行匀速运动,之后立即转移状态到Ready,等待停止运动指令;当接收到停止运动指令,先转移状态到Stop_V,然后返回状态至Ready,当停止运动结束后,反馈结果;当收到造波指令,转移状态为Waver,开始进行造波,之后立即转移状态为Ready;当收到寻零指令,转移状态为Homing,开始进行寻零,之后立即转移状态为Ready,寻零结束后反馈结果。在每次进行状态转移时都要进行异常检测,如果检测到异常,则转移状态为Error,进行异常状态的反馈,之后进入Clear,进行异常发生时信号变量、数组变量的恢复,之后进入Reset,清除伺服电机、驱动器、控制器的异常状态,最后进入初始化状态。
如图4所示:插值采用乒乓数组分批次插值,包括以下步骤:
步骤1、打开文件,从固定路径处打开插值文件。
步骤2、写入数组,从文件中读取部分数据,写入数组,之后判断写入的数据数量是否大于数组长度的一半,如果否,则判断是否到达文件尾,继续插入数据。
步骤3、插值,从数组中读取任意长度的数据,进行三次样条插值,为了解决分批次插值边界外推的影响,插值的有效数据比插值数据少3.
步骤4、数组前半部分插值完毕,继续读入数组、插值。
步骤5、重复步骤1-4,实现在线快速插值。
- 一种基于水槽的吸收式造波装置及其方法
- 一种基于力矩反馈的主动吸收式推板造波装置及造波方法