一种多模融合无线定位系统及方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明属于室内无线定位技术领域,尤其涉及一种多模融合无线定位系统及方法。
背景技术
目前,室内定位技术有极广的应用领域,在金融、监狱、看守所、养老院、矿山、医院、物流等领域都有重要应用。室内定位技术主要有UWB技术、css技术、射频识别技术、蓝牙、wi-fi技术和zigbee技术等。UWB技术即超宽带技术,具有良好的抗干扰性及抗多径能力强,定位精度高,可达0.1米的精确度。css技术为线性调频扩频技术,其定位精度在1米以内,成本较UWB技术低。射频识别技术进行定位,实现成本较低,但其通信距离较短,一般十米以内。Wi-Fi技术进行定位,设备易安装,成本低。zigbee技术是一种短距离、低速度无线网络技术,它以网络内传感器之间相互协调通信以实现定位,其功耗较低,单个传感器成本低。但是现有的多模融合定位系统在运行过程中,无法快速准确对物体进行定位;同时现有的多模融合定位系统不能获取清晰的信号,不利于物体定位信息的处理。
通过上述分析,现有技术存在的问题及缺陷为:现有的多模融合定位系统在运行过程中,无法快速准确对物体进行定位;同时现有的多模融合定位系统不能获取清晰的信号,不利于物体定位信息的处理。
发明内容
针对现有技术存在的问题,本发明提供了一种多模融合无线定位系统及方法。
本发明是这样实现的,一种多模融合无线定位方法,所述多模融合无线定位方法包括以下步骤:
步骤一,通过图像采集模块利用摄像头采集物体的图像信息;通过定位模块利用wifi信号定位单元采集周围的wifi信号,通过wifi信号信息中的wifi参数进行分析,实现通过wifi信号的位置定位;
步骤二,通过移动通信信号定位单元利用GPRS/4G/5G信号与距离最近的三个服务基站进行通信连接,获取通信基站的信息,获取的通信基站信息包括基站所属区域号、基站自身编号以及信号强度衰减值;
步骤三,根据获取的基站所属区域号及基站自身编号查询通信基站数据库,得到获取到的每个通信基站的经纬度坐标值;根据检测到的与每个通信基站间的信号强度衰减值以及通信基站对应的发射功率,估计所处检测位置与通信基站间的正比例化距离;
步骤四,根据估计的移动终端与通信基站间的正比例化距离,计算通信基站对应的定位权值;利用通信基站的定位权值以及通信基站的经纬度坐标值,通过检测与不同的服务基站的距离进行位置定位;
步骤五,通过北斗GPS双模定位单元接收北斗定位信号和GPS定位信号,通过卫星信号进行位置定位,获得检测物体的位置信息;
步骤六,通过距离采集模块利用距离传感器检测物体与传感器的距离;通过轨迹采集模块利用陀螺仪传感器对各简单动作都同时进行多次采样,得到运动轨迹中各简单运动的多次数据;
步骤七,将采集的各简单运动的多次数据进行不同时刻的划分,得到各个简单动作在每个对应时刻的传感器数据区间;取每个对应时刻的传感器数据区间的中间值作为标准值,将多个标准值进行依次串联,得到完整的运动轨迹;
步骤八,中央处理模块分别与定位模块、图像采集模块、轨迹采集模块、距离采集模块、显示模块、无线传输模块、位置信息管理模块、定位信息分析模块、信号处理模块和轨迹预测模块连接,通过中央处理器协调控制所述多模融合无线定位系统各个模块的正常运行;
步骤九,通过位置信息管理模块利用信息管理程序管理系统中物体的位置信息;通过定位信息分析模块利用定位信息分析程序对物体的位置信息进行分析;通过信号处理模块利用信号处理程序对采集的电信号、图像信号和光信号进行处理;
其中,所述信号处理模块对采集的电信号进行处理的过程为:模数转换,把模拟信号变成数字信号,并且进行离散化处理;通过变换域分析、滤波、识别、合成对数字信号进行处理;把经过处理的数字信号还原为模拟信号;
步骤十,通过轨迹预测模块获取包括N张图像的图像检测数据,N为大于1的整数;根据所述图像检测数据,确定所述图像数据中物体的运动数据,所述物体的运动数据用于征所述物体在所述图像数据中的位置;
步骤十一,根据所述物体的运动数据以及预设的运动轨迹预测模型,预测所述物体在预设时间段内的运动轨迹,所述运动轨迹预测模型根据样本训练库中各物体的运动数据,以及与各物体在预设时间段内的运动轨迹训练获得;通过运动轨迹预测模型对物体的运动轨迹进行预测;
步骤十二,通过无线传输模块利用无线传输设备实现中央处理模块与云服务模块搭建相应的信息交互桥梁;通过云服务模块利用云服务器利用大数据处理技术对系统中的数据进行处理分析;通过显示模块利用显示屏显示检测物体的位置信息、物体的图像信息、物体与传感器的距离信息、定位信息分析数据、信号处理结果以及轨迹预测信息的实时数据。
进一步,步骤一中,所述wiFi参数包括wiFi接入点地址编码MAC值与wiFi信号强度值。
进一步,步骤九中,所述对数字信号进行滤波的方法,包括:
(1)将数字信号,建立相应的信号数据集;
(2)对信号数据集中的数字信号进行排序,取中间值为本次有效值。
进一步,步骤九中,所述通过信号处理模块对图像信号进行处理的方法,包括:
(1)将采集的室内图像,建立相应的数据集;
(2)通过噪声识别,提取含有噪声的图像,并进行灰度处理;
(3)图像灰度处理完成后,进行滤波/边缘检测/分割;
(4)预处理完成后,在图像中提取相应的特征值。
进一步,所述图像灰度处理的方法,包括:
1)将带有颜色的图像转换为灰度图像,计算灰度图像的算术平均值;
2)将算术平均值为阈值,对灰度图二值化。
进一步,所述图像灰度处理完成后,进行边缘检测的方法,包括:
1)对滤波完成的图像,进行图像的拉普拉斯变换,得到拉普拉斯图像;
2)在拉普拉斯图像中,提取出所有的零交叉图。
本发明的另一目的在于提供一种实施所述的多模融合无线定位方法的多模融合无线定位系统,所述多模融合无线定位系统包括:
定位模块,与中央处理模块连接,通过利用VLC定位传感器,检测物体的位置信息;
图像采集模块,与中央处理模块连接,通过摄像头,采集物体的图像信息;
轨迹采集模块,与中央处理模块连接,通过陀螺仪传感器,采集物体的运动轨迹;
距离采集模块,与中央处理模块连接,通过距离传感器,检测物体与传感器的距离;
显示模块,与中央处理模块连接,通过显示屏显示检测物体的位置信息、物体的图像信息、物体与传感器的距离信息、定位信息分析数据、信号处理结果以及轨迹预测信息的实时数据;
中央处理模块,分别与定位模块、图像采集模块、轨迹采集模块、距离采集模块、显示模块、无线传输模块、位置信息管理模块、定位信息分析模块、信号处理模块和轨迹预测模块连接,用于通过中央处理器协调控制所述多模融合无线定位系统各个模块的正常运行;
无线传输模块,与中央处理模块连接,通过利用无线传输设备,用以中央处理模块与云服务模块搭建相应的信息交互桥梁;
云服务模块,与无线传输模块连接,通过云服务器利用大数据处理技术对系统中的数据进行处理分析;
位置信息管理模块,与中央处理模块连接,通过信息管理程序管理系统中物体的位置信息;
定位信息分析模块,与中央处理模块连接,通过定位信息分析程序对物体的位置信息进行分析;
信号处理模块,与中央处理模块连接,通过信号处理程序对采集的电信号、图像信号和光信号进行处理;
轨迹预测模块,与中央处理模块连接,根据检测的数据,对物体的运动轨迹进行预测。
进一步,所述定位模块包括:
wiFi信号定位单元,用于通过wifi信号传输器采集周围的wifi信号,通过wifi信号信息进行位置定位;
移动通信信号定位单元,用于通过GPRS/4G/5G信号通信器与距离最近的三个服务基站进行通信连接,通过移动通信信号进行位置定位;
北斗GPS双模定位单元,用于通过北斗定位信号和GPS定位信号进行位置定位。
本发明的另一目的在于提供一种存储在计算机可读介质上的计算机程序产品,包括计算机可读程序,供于电子装置上执行时,提供用户输入接口以实施所述的多模融合无线定位方法。
本发明的另一目的在于提供一种计算机可读存储介质,储存有指令,当所述指令在计算机上运行时,使得计算机执行所述的多模融合无线定位方法。
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明提供的多模融合无线定位系统,通过定位模块、图像采集模块、轨迹采集模块和距离采集模块,可以采集物体位置的多种参数,提高物体定位的准确度。本发明通过云服务器利用大数据处理技术对系统中的数据进行处理分析,提高数据处理的精度和效率;本发明通过位置信息管理模块、定位信息分析模块和轨迹预测模块,有利于物体运动的分析处理;同时本发明通过信号处理模块利用信号处理程序对采集的电信号、图像信号和光信号进行处理,为物体定位提供相应清晰的信号,有利于物体的定位。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
图1是本发明实施例提供的多模融合无线定位系统结构示意图;
图中:1、定位模块;2、图像采集模块;3、轨迹采集模块;4、距离采集模块;5、显示模块;6、中央处理模块;7、无线传输模块;8、云服务模块;9、位置信息管理模块;10、定位信息分析模块;11、信号处理模块;12、轨迹预测模块。
图2是本发明实施例提供的多模融合无线定位方法流程图。
图3是本发明实施例提供的信号处理模块对采集的电信号进行处理的方法流程图。
图4是本发明实施例提供的信号处理模块中对图像信号进行处理的方法流程图。
图5是本发明实施例提供的图像灰度处理方法流程图。
图6是本发明实施例提供的移动通信信号定位单元采用的定位方法流程图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
针对现有技术存在的问题,本发明提供了一种多模融合无线定位系统及其方法,下面结合附图对本发明作详细的描述。
如图1所示,本发明实施例提供的多模融合无线定位系统,包括:
定位模块1,与中央处理模块6连接,通过利用VLC定位传感器,检测物体的位置信息。
图像采集模块2,与中央处理模块6连接,通过摄像头,采集物体的图像信息。
轨迹采集模块3,与中央处理模块6连接,通过陀螺仪传感器,采集物体的运动轨迹。
距离采集模块4,与中央处理模块6连接,通过距离传感器,检测物体与传感器的距离。
显示模块5,与中央处理模块6连接,通过显示屏,用以显示相关的数据。
中央处理模块6,分别与定位模块1、图像采集模块2、轨迹采集模块3、距离采集模块4、显示模块5、无线传输模块7、位置信息管理模块9、定位信息分析模块10、信号处理模块11和轨迹预测模块12连接,通过中央处理器协调控制所述多模融合无线定位系统各个模块的正常运行。
无线传输模块7,与中央处理模块6连接,通过利用无线传输设备,用以中央处理模块与云服务模块搭建相应的信息交互桥梁。
云服务模块8,与无线传输模块7连接,通过云服务器利用大数据处理技术对系统中的数据进行处理分析。
位置信息管理模块9,与中央处理模块6连接,通过信息管理程序管理系统中物体的位置信息。
定位信息分析模块10,与中央处理模块6连接,通过定位信息分析程序对物体的位置信息进行分析。
信号处理模块11,与中央处理模块6连接,通过信号处理程序对采集的电信号、图像信号和光信号进行处理。
轨迹预测模块12,与中央处理模块6连接,根据检测的数据,对物体的运动轨迹进行预测。
本发明实施例中的定位模块1包括:
wiFi信号定位单元,用于通过wifi信号传输器采集周围的wifi信号,通过wifi信号信息进行位置定位;
移动通信信号定位单元,用于通过GPRS/4G/5G信号通信器与距离最近的三个服务基站进行通信连接,通过移动通信信号进行位置定位;
北斗GPS双模定位单元,用于通过北斗定位信号和GPS定位信号进行位置定位。
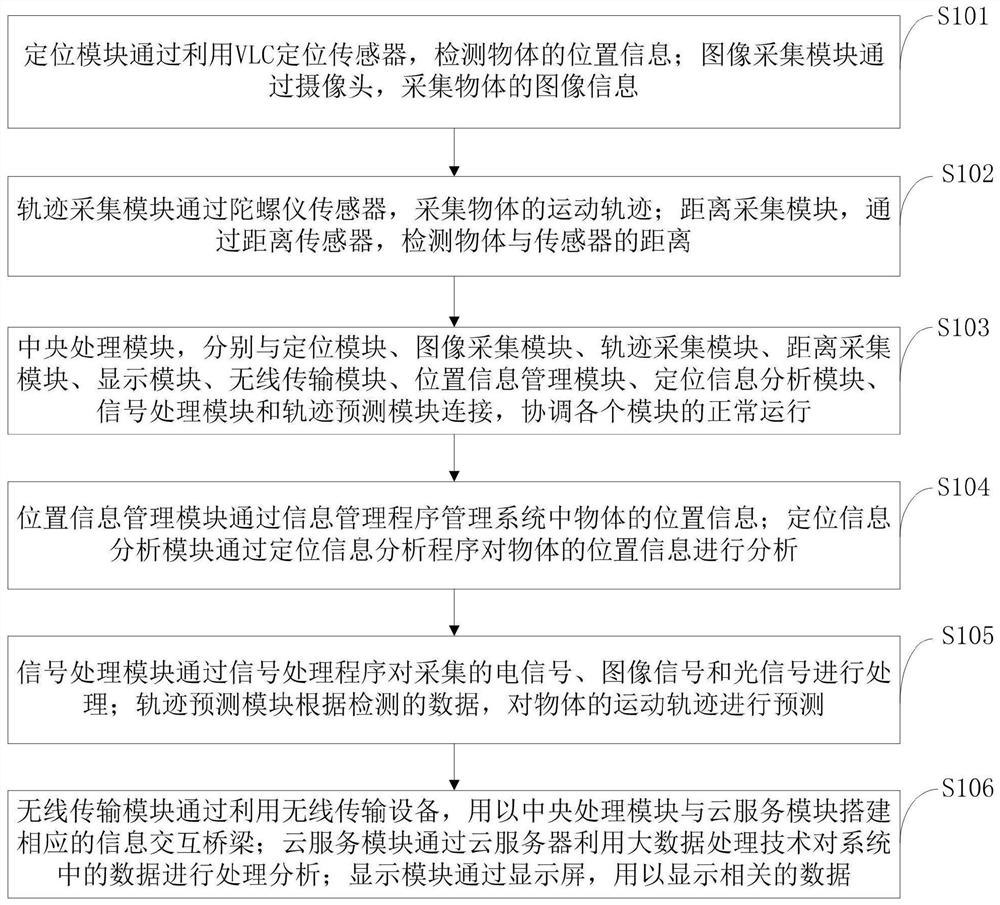
如图2所示,本发明实施例提供的多模融合无线定位方法,包括:
S101:定位模块通过利用VLC定位传感器,检测物体的位置信息;图像采集模块通过摄像头,采集物体的图像信息。
S102:轨迹采集模块通过陀螺仪传感器,采集物体的运动轨迹;距离采集模块,通过距离传感器,检测物体与传感器的距离。
S103:中央处理模块,分别与定位模块、图像采集模块、轨迹采集模块、距离采集模块、显示模块、无线传输模块、位置信息管理模块、定位信息分析模块、信号处理模块和轨迹预测模块连接,协调各个模块的正常运行。
S104:位置信息管理模块通过信息管理程序管理系统中物体的位置信息;定位信息分析模块通过定位信息分析程序对物体的位置信息进行分析。
S105:信号处理模块通过信号处理程序对采集的电信号、图像信号和光信号进行处理;轨迹预测模块根据检测的数据,对物体的运动轨迹进行预测。
S106:无线传输模块通过利用无线传输设备,用以中央处理模块与云服务模块搭建相应的信息交互桥梁;云服务模块通过云服务器利用大数据处理技术对系统中的数据进行处理分析;显示模块通过显示屏,用以显示相关的数据。
如图3所示,本发明实施例提供的S105中,信号处理模块对采集的电信号进行处理的具体过程为:
S201:模数转换,把模拟信号变成数字信号,并且进行离散化处理;
S202:通过变换域分析、滤波、识别、合成对数字信号进行处理;
S203:把经过处理的数字信号还原为模拟信号。
所述数字信号进行滤波的具体过程为:
将数字信号,建立相应的信号数据集;
对信号数据集中的数字信号进行排序,取中间值为本次有效值。
如图4所示,本发明实施例提供的S105中,信号处理模块中对图像信号进行处理的具体过程为:
S301:将采集的室内图像,建立相应的数据集;
S302:通过噪声识别,提取含有噪声的图像,并进行灰度处理;
S303:图像灰度处理完成后,进行滤波/边缘检测/分割;
S304:预处理完成后,在图像中提取相应的特征值。
如图5所示,所述图像灰度处理的具体过程为:
S401:将带有颜色的图像转换为灰度图像,计算灰度图像的算术平均值;
S402:将算术平均值为阈值,对灰度图二值化。
所述图像灰度处理完成后,进行边缘检测的具体过程为:
对滤波完成的图像,进行图像的拉普拉斯变换,得到拉普拉斯图像;
在拉普拉斯图像中,提取出所有的零交叉图。
本发明实施例中的步骤S101中,所述利用多种不同模式的定位单元检测物体的位置信息,包括:
通过wifi信号定位单元采集周围的wifi信号,通过wifi信号信息中的wifi参数进行分析,实现通过wifi信号的位置定位;wiFi参数包括wiFi接入点地址编码MAC值与wiFi信号强度值。
通过移动通信信号定位单元利用GPRS/4G/5G信号与距离最近的三个服务基站进行通信连接,通过检测与不同的服务基站的距离进行位置定位;
通过北斗GPS双模定位单元接收北斗定位信号和GPS定位信号,通过卫星信号进行位置定位。
如图6所示,本发明实施例中的步骤S101中,所述移动通信信号定位单元采用的定位方法包括:
S501,利用移动通信信号定位单元获取通信基站的信息,获取的通信基站信息包括基站所属区域号、基站自身编号以及信号强度衰减值;
S502,根据获取的基站所属区域号及基站自身编号查询通信基站数据库,得到获取到的每个通信基站的经纬度坐标值;
S503,根据检测到的与每个通信基站间的信号强度衰减值以及通信基站对应的发射功率,估计所处检测位置与通信基站间的正比例化距离;
S504,根据估计的移动终端与通信基站间的正比例化距离,计算通信基站对应的定位权值;
S505,利用通信基站的定位权值以及通信基站的经纬度坐标值,计算得到所处检测位置的位置坐标。
本发明实施例中的步骤S102中,所述轨迹采集模块采集物体的运动轨迹的具体方法包括:
通过陀螺仪传感器对各简单动作都同时进行多次采样,得到运动轨迹中各简单运动的多次数据;
将采集的各简单运动的多次数据进行不同时刻的划分,得到各个简单动作在每个对应时刻的传感器数据区间;
取每个对应时刻的传感器数据区间的中间值作为标准值,将多个标准值进行依次串联,得到完整的运动轨迹。
本发明实施例中的步骤S105中,所述轨迹预测模块根据检测的数据,对物体的运动轨迹进行预测,包括:
通过轨迹预测模块获取包括N张图像的图像检测数据,N为大于1的整数;
根据所述图像检测数据,确定所述图像数据中物体的运动数据,所述物体的运动数据用于征所述物体在所述图像数据中的位置;
根据所述物体的运动数据以及预设的运动轨迹预测模型,预测所述物体在预设时间段内的运动轨迹,所述运动轨迹预测模型根据样本训练库中各物体的运动数据,以及与各物体在预设时间段内的运动轨迹训练获得;
通过运动轨迹预测模型对物体的运动轨迹进行预测。
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用全部或部分地以计算机程序产品的形式实现,所述计算机程序产品包括一个或多个计算机指令。在计算机上加载或执行所述计算机程序指令时,全部或部分地产生按照本发明实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(DSL)或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输)。所述计算机可读取存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,DVD)、或者半导体介质(例如固态硬盘SolidState Disk(SSD))等。
以上所述,仅为本发明较优的具体的实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
- 一种多模融合无线定位系统及方法
- 一种基于多模式医学融合图像的脊柱脊髓体表穿刺入路点智能定位系统及方法