一种半主动悬架的车身高度补偿的控制方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及车辆车身高度调节的技术领域,尤其涉及一种半主动悬架的车身高度补偿的控制方法。
背景技术
在正常行驶过程中,车身整体高度处于水平状态,当轮胎出现问题,更换小备胎后,由于轮胎的滚动半径大于备胎的滚动半径,更换小备胎的一侧的车身高度会相应降低,车身会向更换小备胎的一侧倾斜,降低驾驶安全性和舒适性,并影响其他和车身高度密切相关的驾驶辅助功能,例如基于雷达和摄像头的自动驾驶功能、基于车身高度信息的DLP可调大灯和AR抬头显示功能等。
发明内容
针对现有的车辆轮胎更换备胎后存在车辆向备胎的一侧倾斜的上述问题,现旨在提供一种半主动悬架的车身高度补偿的控制方法,通过气泵向空气弹簧充气,伸长悬架,可弥补备胎的滚动半径变小引起的车身高度降低,提升更换备胎后的舒适性,给驾驶员及乘客提供车内水平的驾驶、乘坐环境,并调整驾驶过程中的视野至水平,提升驾驶安全性,避免夜间驾驶时大灯光线上抬影响来车行驶员视线及保持主动安全相关传感器探测性能,补偿抬头显示AR功能及可调大灯的效果。
具体技术方案如下:
一种半主动悬架的车身高度补偿的控制方法,其中,所述车辆具备电子稳定程序控制器和半主动悬架控制器,所述车辆的每一轮胎处均设有轮速传感器、高度传感器和空气弹簧;
所述调节方法包括:
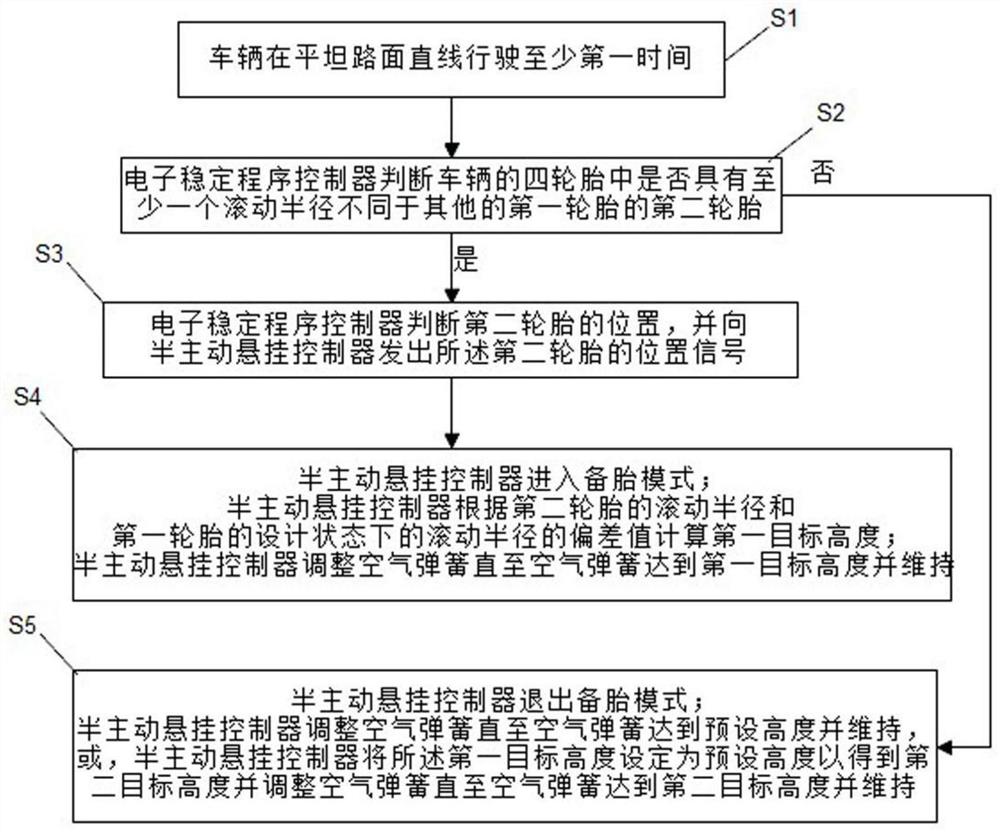
步骤S1:所述车辆在平坦路面直线行驶至少第一时间;
步骤S2:所述电子稳定程序控制器判断所述车辆的四所述轮胎中是否具有至少一个滚动半径不同于其他的第一轮胎的第二轮胎;若是,则执行步骤S3;若否,则执行步骤S5;
步骤S3:所述电子稳定程序控制器判断所述第二轮胎的位置,并向所述半主动悬挂控制器发出所述第二轮胎的位置信号;
步骤S4:所述半主动悬挂控制器进入备胎模式;
所述半主动悬挂控制器根据所述第二轮胎的滚动半径和所述第一轮胎的滚动半径的设计状态下的偏差值计算第一目标高度;
所述半主动悬挂控制器调整所述空气弹簧直至所述空气弹簧达到所述第一目标高度并维持;
步骤S5:所述半主动悬挂控制器退出备胎模式;
所述半主动悬挂控制器调整所述空气弹簧直至所述空气弹簧达到预设高度并维持,或,所述半主动悬挂控制器将所述第一目标高度设定为预设高度以得到第二目标高度并调整所述空气弹簧直至所述空气弹簧达到所述第二目标高度并维持。
一种半主动悬架的车身高度补偿的控制方法,其中,所述车辆具备电子稳定程序控制器和半主动悬架控制器,所述车辆的每一轮胎处均设有轮速传感器、高度传感器和空气弹簧;
所述调节方法包括:
步骤A1:所述车辆在平坦路面直线行驶至少第一时间;
步骤A2:所述电子稳定程序控制器判断所述车辆的四所述轮胎中的至少一个被替换为小备胎;
步骤A3:所述电子稳定程序控制器判断所述小备胎的位置,并向所述半主动悬挂控制器发出所述小备胎的位置信号;
步骤A4:所述半主动悬挂控制器进入备胎模式;
所述半主动悬挂控制器根据所述小备胎的滚动半径和所述轮胎的滚动半径的设计状态下的偏差值计算目标高度;
所述半主动悬挂控制器调整所述空气弹簧直至所述空气弹簧达到所述目标高度并维持。
一种半主动悬架的车身高度补偿的控制方法,其中,所述车辆具备电子稳定程序控制器和半主动悬架控制器,所述车辆的每一轮胎处均设有轮速传感器、高度传感器和空气弹簧;
所述调节方法包括:
步骤B1:所述车辆在平坦路面直线行驶至少第一时间;
步骤B2:所述电子稳定程序控制器判断所述车辆当前无小备胎;
步骤B3:所述电子稳定程序控制器向所述半主动悬架控制器更新所述小备胎的位置信号为无备胎;
步骤B4,所述半主动悬挂控制器退出备胎模式;
所述半主动悬挂控制器将所有悬架的目标高度设定为预设高度;
所述半主动悬挂控制器调整所述空气弹簧直至所述空气弹簧达到所述目标高度并维持。
上述的车辆的车身高度的调节方法,其中,所述车辆还具备与所述空气弹簧相连接的气泵,在所述步骤S4中,所述半主动悬挂控制器通过控制所述气泵以调整所述第二轮胎处的所述空气弹簧的高度。
上述的车辆的车身高度的调节方法,其中,所述车辆的每一轮胎处还设有高度传感器,在所述步骤S4中,所述半主动悬挂控制器通过所述高度传感器探测所述车辆的车轮轮心到所述车辆的翼子板饰板的下边沿的纵向距离,所述半主动悬挂控制器控制所述气泵调整所述第二轮胎处的所述空气弹簧达到所述第一目标高度后,停止调整。
上述的车辆的车身高度的调节方法,其中,所述半主动悬挂控制器调整所述空气弹簧直至所述空气弹簧达到所述第一目标高度,所述车辆的车身保持水平,所述半主动悬挂控制器停止调整所述第二轮胎处的所述空气弹簧的高度,并维持该所述高度。
上述的车辆的车身高度的调节方法,其中,在步骤S2中:所述电子稳定程序控制器根据所述轮速传感器的差值判断所述车辆的四所述轮胎中是否具有至少一个滚动半径不同于其他的第一轮胎的第二轮胎,通过通讯总线将所述电子稳定程序控制器得到的判断结果传递给所述半主动悬架控制器。
上述的车辆的车身高度的调节方法,其中,在步骤S3中:所述电子稳定程序控制器通过所述轮速传感器的差值判断所述第二轮胎的位置,并向所述半主动悬挂控制器发出所述第二轮胎的位置信号。
上述技术方案与现有技术相比具有的积极效果是:
本发明的电子稳定程序控制器可通过识别轮速传感器来判定是否更换了备胎,电子稳定程序控制器将更换备胎的一侧相关信息通过通讯总线传递给半主动悬架控制器,半主动悬架控制器在接收电子稳定程序控制器提供的备胎的位置信息后,向对应的空气弹簧充气,将车身整体恢复至水平状态,通过向空气弹簧补充气体,伸长空气弹簧,可弥补备胎滚动半径变小引起的车身高度降低,提升更换备胎后的舒适性,给驾驶员及乘客提供车内水平的驾驶、乘坐环境,并调整驾驶过程中的视野至水平,提升驾驶安全性,避免夜间驾驶时大灯光线上抬影响来车行驶员视线及保持主动安全相关传感器探测性能,补偿抬头显示AR功能及可调大灯的效果。
附图说明
图1为本发明一种半主动悬架的车身高度补偿的控制方法的车辆内的系统原理图;
图2为本发明一种半主动悬架的车身高度补偿的控制方法的工作流程图;
图3为本发明一种半主动悬架的车身高度补偿的控制方法的工作流程图;
图4为本发明一种半主动悬架的车身高度补偿的控制方法的工作流程图;
附图中:1、电子稳定程序控制器;2、半主动悬架控制器;3、气泵;4、轮速传感器;5、高度传感器;6、空气弹簧;7、通讯总线。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
图1为本发明一种半主动悬架的车身高度补偿的控制方法的车辆内的系统原理图,图2为本发明一种半主动悬架的车身高度补偿的控制方法的工作流程图,如图1至图2所示,示出了一种较佳实施例的车辆的车身高度的调节方法,车辆具备电子稳定程序控制器1和半主动悬架控制器2,车辆的每一轮胎处均设有轮速传感器4、高度传感器5和空气弹簧6。
调节方法包括:
步骤S1:车辆在平坦路面直线行驶至少第一时间;
步骤S2:电子稳定程序控制器1判断车辆的四轮胎中是否具有至少一个滚动半径不同于其他的第一轮胎的第二轮胎;若是,则执行步骤S3;若否,则执行步骤S5;
步骤S3:电子稳定程序控制器1判断第二轮胎的位置,并向半主动悬挂控制器2发出第二轮胎的位置信号;
步骤S4:半主动悬挂控制器2进入备胎模式;
半主动悬挂控制器2根据第二轮胎的滚动半径和第一轮胎的滚动半径的设计状态下的偏差值计算第一目标高度;
半主动悬挂控制器2调整空气弹簧6直至空气弹簧6达到第一目标高度并维持;
步骤S5:半主动悬挂控制器2退出备胎模式;
半主动悬挂控制器2调整空气弹簧6直至空气弹簧6达到预设高度并维持,或,半主动悬挂控制器2将第一目标高度设定为预设高度以得到第二目标高度并调整空气弹簧6直至空气弹簧6达到第二目标高度并维持。
优选的,步骤S1中:车辆在水平路面直线行驶约1分钟。
图3为本发明一种半主动悬架的车身高度补偿的控制方法的工作流程图,如图3所示,示出了一种较佳实施例的车辆的车身高度的调节方法,车辆具备电子稳定程序控制器1和半主动悬架控制器2,车辆的每一轮胎处均设有轮速传感器4、高度传感器5和空气弹簧6。
调节方法包括:
步骤A1:车辆在平坦路面直线行驶至少第一时间;
步骤A2:电子稳定程序控制器1判断车辆的四轮胎中的至少一个被替换为小备胎;
步骤A3:电子稳定程序控制器1判断小备胎的位置,并向半主动悬挂控制器2发出小备胎的位置信号;
步骤A4:半主动悬挂控制器2进入备胎模式;
半主动悬挂控制器2根据小备胎的滚动半径和轮胎的滚动半径的设计状态下的偏差值计算目标高度;
半主动悬挂控制器2调整空气弹簧6直至空气弹簧6达到目标高度并维持。
该调节方法为进入备胎模式的过程。
图4为本发明一种半主动悬架的车身高度补偿的控制方法的工作流程图,如图4所示,示出了一种较佳实施例的车辆的车身高度的调节方法,车辆具备电子稳定程序控制器1和半主动悬架控制器2,车辆的每一轮胎处均设有轮速传感器4、高度传感器5和空气弹簧6;
调节方法包括:
步骤B1:车辆在平坦路面直线行驶至少第一时间;
步骤B2:电子稳定程序控制器1判断车辆当前无小备胎;
步骤B3:电子稳定程序控制器1向半主动悬架控制器2更新小备胎的位置信号为无备胎;
步骤B4,半主动悬挂控制器2退出备胎模式;
半主动悬挂控制器2将所有悬架的目标高度设定为预设高度;
半主动悬挂控制器2调整空气弹簧6直至空气弹簧6达到目标高度并维持。
该调节方法为退出备胎模式的过程。
进一步,作为一种较佳的实施例,车辆还具备与空气弹簧6相连接的气泵3,在步骤S4中,半主动悬挂控制器2通过控制气泵3以调整第二轮胎处的空气弹簧6的高度。
进一步,作为一种较佳的实施例,车辆的每一轮胎处还设有高度传感器5,在步骤S4中,半主动悬挂控制器2通过高度传感器5探测车辆的车轮轮心到车辆的翼子板饰板的下边沿的纵向距离,半主动悬挂控制器2控制气泵3调整第二轮胎处的空气弹簧6达到第一目标高度后,停止调整。
优选的,电子稳定程序控制器1与半主动悬挂控制器2通过通讯总线7信号连接,半主动悬挂控制器2与气泵3硬线连接,半主动悬挂控制器2与高度传感器5信号连接,气泵3与空气弹簧6通过气管连接。
优选的,高度传感器5的数量为4个,分别设于车辆的车身与悬架摆臂之间;空气弹簧6的数量为4个,分别设于车辆的四个轮胎处。
当ESP识别到更换备胎后,通过通讯总线7将备胎位置信息传递给CAirS,CAirS控制器会驱动气泵3将气体充进对应空气悬架,此时悬架伸展,可弥补备胎的滚动半径变小引起的车身高度降低,提升更换备胎后的舒适性,给驾驶员及乘客提供车内水平的驾驶、乘坐环境,并调整驾驶过程中的视野至水平,提升驾驶安全性,避免夜间驾驶时大灯光线上抬影响来车行驶员视线及保持主动安全相关传感器探测性能,补偿抬头显示AR功能及可调大灯的效果。
车辆具备电子稳定程序控制器1和半主动悬架控制器2,每个轮毂轴承处安装有轮速传感器4,每个空气弹簧6的摆臂与车身都安装有一个高度传感器5,每个空气弹簧6都通过气管与气泵3相连接,电子稳定程序控制器1和半主动悬架控制器2通过通讯总线7进行通讯,轮速传感器4通过AK或者PMW协议直接与电子稳定程序ESP连接,高度传感器5通过PSI5协议与空气悬架控制器CAirS直接连接。
优选的,通讯总线7为CAN总线。
调节方法包括:
在步骤S1前,电子稳定程序控制器1持续监控每一轮速传感器4,并探测到的脉冲数,并以此计算每一轮胎的轮速。
在步骤S2中,电子稳定程序控制器1通过计算4个车轮的轮速,如在第一时间内其中一个轮胎的轮速明显快于其他三个轮速的轮速并保持一定比例,则判定车轮更换了小备胎。
优选的,轮速与轮胎半径之间可通过计算得出。
在步骤S3中,电子稳定程序控制器1根据各轮胎的轮速差异判断备胎的位置,并通过CAN总线向半主动悬挂控制器2发出第二轮胎的位置信号;
在步骤S4中,半主动悬挂控制器2此时尚处于默认高度(默认高度即为出厂设定的高度),在接收到ESP发的备胎位置信号后进入备胎模式;
半主动悬挂控制器2获取当期高度传感器或角度传感器数值,通过高度模型,即高度传感器或角度传感器的旋转角度-轮心至轮眉高度的线性方程,计算出当前轮心至轮眉高度。
半主动悬挂控制器2根据正常的滚动半径和备胎的滚动半径的差值,叠加当前轮心至轮眉高度,计算出轮心至轮眉高度的目标值,再通过高度模型,将此高度值转化为对应高度传感器或角度传感器的角度值。
半主动悬架控制器2驱动气泵将空气充进相应空气弹簧6,并时刻获取当前高度传感器或角度传感器的数值。
半主动悬挂控制器2调整空气弹簧6直至空气弹簧6达到角度并维持。
在步骤S5中,半主动悬挂控制器调整空气弹簧直至空气弹簧达到默认高度并维持,高度调节过程与步骤S3相似。
以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围。
本发明在上述基础上还具有如下实施方式:
本发明的进一步实施例中,请继续参见图1至图4所示,半主动悬挂控制器2调整空气弹簧6直至空气弹簧6达到第一目标高度,车辆的车身保持水平,半主动悬挂控制器2停止调整第二轮胎处的空气弹簧6的高度,并维持该高度。
本发明的进一步实施例中,在步骤S2中:电子稳定程序控制器1根据轮速传感器4的差值判断车辆的四轮胎中是否具有至少一个滚动半径不同于其他的第一轮胎的第二轮胎,通过通讯总线7将电子稳定程序控制器1得到的判断结果传递给半主动悬架控制器2。
本发明的进一步实施例中,在步骤S3中:电子稳定程序控制器1通过轮速传感器4的差值判断第二轮胎的位置,并向半主动悬挂控制器1发出第二轮胎的位置信号。
本发明的进一步实施例中,半主动悬架控制器2根据第二轮胎处的高度传感器5的信号判断当前悬架的实际高度,若更新后的第一目标高度与当前实际高度有偏差,半主动悬架控制器2驱动气泵3向空气弹簧6中充气或者抽气,以达到第一目标高度。
本发明的电子稳定程序控制器1可通过识别轮速传感器4来判定是否更换了备胎,电子稳定程序控制器1将更换备胎的一侧相关信息通过控制器局域网络7传递给半主动悬架控制器2,半主动悬架控制器2在接收电子稳定程序控制器1提供的备胎的位置信息后,向对应的空气弹簧6充气,将车身整体恢复至水平状态,通过向空气弹簧6补充气体,伸长空气弹簧6,可弥补备胎滚动半径变小引起的车身高度降低,提升更换备胎后的舒适性,给驾驶员及乘客提供车内水平的驾驶、乘坐环境,并调整驾驶过程中的视野至水平,提升驾驶安全性,避免夜间驾驶时大灯光线上抬影响来车行驶员视线及保持主动安全相关传感器探测性能,补偿抬头显示AR功能及可调大灯的效果。
关于空气悬架高度模型,即高度传感器角度-轮心至轮眉高度关系线性方程,要求空气悬架传感器布置方案尽量满足此线性关系,比值设为常数K。
关于备胎模式下,相应空气弹簧目标高度值的计算需要实际测得,非理论值。过程为,将车辆开到动态转毂上,此时车辆处于默认高度,通常开发半主动悬架的供应商/主机厂,在动态转股两侧都会安装高度探测装置,此装置可识别出当前轮眉的高度,驱动车辆在转毂行驶,记录此时空气悬架发出的弹簧高度值H0;将其中一轮胎更换为小备胎,并驱动车辆在转毂行驶;通过诊断服务控制半主动悬架控制器,向更换备胎的弹簧中充气,直至高度探测装置识别到轮眉高度一致(在偏差范围内);记录此时空气悬架发出的弹簧高度值H1。ΔH=H1-H0,即为高度的补偿量,ΔH/K即为高度传感器(角度传感器)的角度差。目标高度:Ht=h+ΔH;目标角度:At=Ht/k。
以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
- 一种半主动悬架的车身高度补偿的控制方法
- 一种四线式空气悬架车身高度传感器及车身高度控制方法