一种磁牵引吻合装置
文献发布时间:2023-06-19 10:52:42
技术领域
本发明属于磁压吻合技术领域,更具体地,涉及一种磁牵引吻合装置。
背景技术
肛门直肠畸形,又称肛门闭锁,发病率位于先天性消化道畸形首位,根据直肠发育盲端与括约肌的位置关系,将肛门闭锁分为低、中、高位三种,低位肛门闭锁采用经会阴成形术,治疗方案较为成熟。而中、高位肛门闭锁,术后大便失禁,便秘,直肠粘膜脱垂等并发症的发生率高,严重影响患儿术后长期生活质量。分析原因主要有两个方面:一是患儿本身存在直肠、括约肌以及排便支配神经发育不良;二是手术对这些脆嫩组织的损伤。虽然手术方式不断改进,经历了从“巨创”到“微创”的改变,然而目前手术仍是在肛门周围进行解剖,对直肠周围本就发育不良的括约肌、神经造成损伤。因此,保护直肠周围的括约肌和神经,以及精准定位直肠穿过括约肌中心,是提高术后患儿排便功能的关键。
近年来,磁压吻合技术在食管闭锁、肠吻合以及肝移植血管吻合过程中均有成功应用的案例,不仅降低了手术难度,减轻了患者的痛苦,同时也减少了并发症的出现。该技术利用磁铁间的相互吸引力作用,对两个磁铁间的组织产生机械性压迫作用,使其逐渐坏死,而周围的组织分层愈合。如果采用磁压吻合技术进行肠管内吻合,就可以避免直肠周围解剖操作,从而大幅降低直肠周围组织损伤。
然而,某些高位肛门闭锁患者,其直肠盲端与肛门距离较远,需要磁铁牵引直肠盲端在体内穿行一段距离,才能到达肛门进行压迫吻合。但肛周解剖结构复杂,需压迫多种组织结构,不同的组织弹性不同,所需的压迫力不同。现有的磁吻合装置由两块永磁体构成,磁力大小与永磁块间距成反比,距离越小压力越大,磁力大小无法调控。磁吻合装置在不同组织中穿行时,磁力太小则牵引力不足,磁力过大则可能导致组织撕裂、出血等。同时直肠盲端还需要精确的穿过括约肌中心并形成直肠肛管角,以保证患儿良好的排便功能。但现有的磁吻合装置无法实现磁力方向的调控,从而在控制直肠盲端精确穿过括约肌中心方面存在问题。
发明内容
针对现有技术的缺陷,本发明的目的在于提供一种磁牵引吻合装置,旨在解决现有的磁吻合装置磁力大小及方向难以调控,导致通过磁吻合装置定位的准确度不高的问题。
为实现上述目的,本发明提供了一种磁牵引吻合装置,包括传感模块、磁场控制模块和牵引模块;
使用时传感模块和牵引模块连为一体放置于被牵引目标内部;传感模块与磁场控制模块建立信号连接;
传感模块用于实时向磁场控制模块反馈压力信息,牵引模块用于在磁场的作用下牵引被牵引目标移动;所述磁场控制模块用于根据压力信息调整磁场的大小和方向;其中,传感模块提供的压力信息用于识别被牵引目标的位置。
优选地,传感模块包括压力传感器;压力传感器固定于牵引模块顶端,在牵引过程中始终接触被牵引目标,用于实时反馈压力信息;
优选地,牵引模块包括永磁体或电磁线圈,用于与磁场控制模块相作用,产生牵引力。
优选地,磁场控制模块包括副磁体和主磁体;副磁体分布于主磁体的四周;主磁体用于控制磁力大小;副磁体用于控制磁场方向。
具体原理如下:主磁体采用永磁体外包电磁线圈的复合结构,从而可实现永磁体磁场的调节,当磁力需增大时,使电磁线圈产生的磁场方向与永磁体同向,两个磁场叠加使得磁场增强、磁力增大;当磁力需减小时,则使电磁线圈产生的磁场方向与永磁体反向;副磁体采用空心线圈或带铁芯的线圈,副磁体分布于主磁体周围,当牵引模块需要调控方向时,所对应方向的副磁体产生磁场,与主磁体相互配合调整牵引模块受力方向;采用主副磁体的结构,增大了磁力调控的范围,且可实现自动化反馈控制,提高磁力调控的实时性和有效性。
当本发明的牵引吻合装置应用于治疗肛门直肠畸形时,通过调控主磁体,进而调节体内磁场大小,可以实现在压迫不同组织结构时使用不同大小的磁力,避免磁力过大压迫过快造成出血的现象。通过调节副磁体调控磁场方向,可引导体内磁铁做多个方向的运动,以满足高位肛门闭锁形成正常直肠肛管角的需求。
优选地,被牵引目标为直肠盲端。由于磁牵引吻合装置中的传感模块可以识别不同组织的压力,以精准确定括约肌中心,避免括约肌的损伤,因此,当被牵引目标为直肠盲端时,本发明公开的磁牵引吻合装置可以用于在无组织损坏的情况下,治疗肛门直肠畸形。
优选地,永磁体外侧包裹着聚碳酸酯(PC)层或其他生物相容性材料。由于永磁体大部分为金属材料,极容易被腐蚀氧化,因此,在实际应用中,永磁体外侧包裹PC层可以避免溶液对磁体的腐蚀,本发明公开的磁吻合装置可以应用在治疗肛门直肠畸形,永磁体外侧包裹PC层,可以有效避免消化液对永磁体的腐蚀,提高了永磁体在实际应用中的安全性。
优选地,永磁体为钕铁硼材料,钕铁硼永磁材料为目前磁能积最高的永磁材料,可以用最小的体积产生最高的磁场强度,磁场强度越高,产生的磁力越大。
优选地,磁牵引吻合装置还包括牵引线,牵引线一端连接永磁体,另一端连接张力装置。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
本发明提供的传感模块实时向磁场控制模块反馈压力信息,磁场控制模块用于根据压力信息为牵引模块调控磁场的大小,根据牵引模块穿行的组织密度合理调控磁力大小,控制穿行速度,避免牵引速度过大造成组织撕裂或出血。根据压力信息还可识别被牵引目标的位置,由于不同组织密度不同,被牵引体在多种组织中穿行时,其阻力不同,因此可依据压力信息的大小判断被牵引体穿行到哪一层组织。在被牵引体靠近括约肌附近时,由于括约肌是一圈闭合的肌肉环,肌肉阻力大,而环中间阻力小,可通过压力大小定位被牵引体精确穿过括约肌环中心,因此本发明提高了磁吻合装置定位的准确度。
附图说明
图1是本发明提供的牵引与传感模块的结构示意图;
图2是本发明提供的磁场控制模块的平面结构示意图;
图3是本发明提供的磁场控制模块的立体结构示意图;
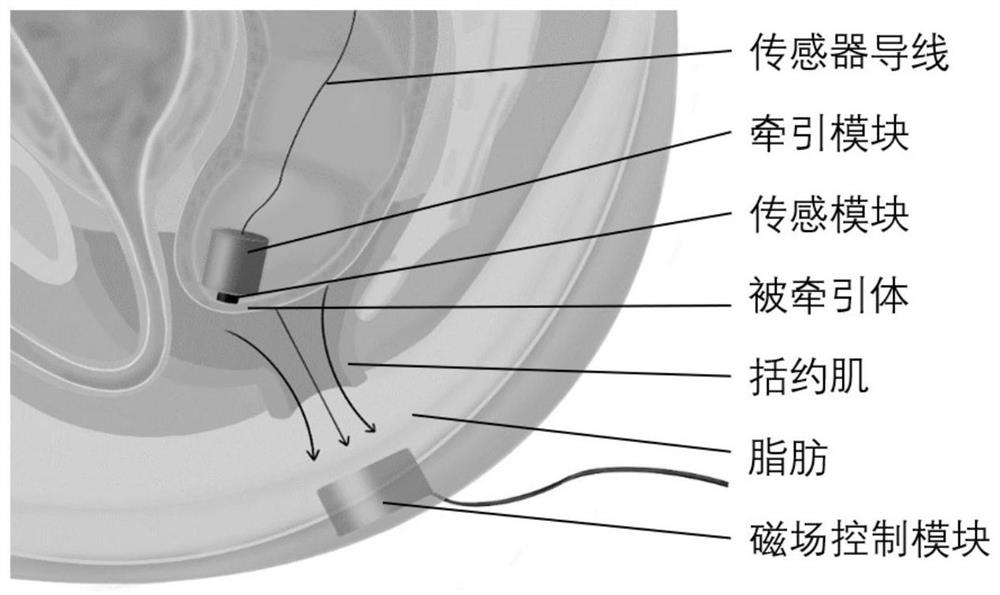
图4是本发明实施例提供的牵引过程示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
如图1和如图2所示,本发明提供了一种磁牵引吻合装置,包括牵引模块、传感模块和磁场控制模块;
使用时牵引模块和传感模块共同放置于被牵引目标内部;传感模块与磁场控制模块建立信号连接;
传感模块用于实时向磁场控制模块反馈压力信息;牵引模块用于在磁场的作用下牵引被牵引目标移动;磁场控制模块用于根据压力信息为牵引模块提供磁场的大小和方向;其中,传感模块提供的压力信息用于识别被牵引目标的位置。
磁场控制模块为牵引模块提供磁场的大小和方向的原理如下:
具体原理如下:主磁体采用永磁体外包电磁线圈的复合结构,从而可实现永磁体磁场的调节,当磁力需增大时,使电磁线圈产生的磁场方向与永磁体同向,两个磁场叠加使得磁场增强、磁力增大;当磁力需减小时,则使电磁线圈产生的磁场方向与永磁体反向;副磁体采用空心线圈或带铁芯的线圈,副磁体分布于主磁体周围,当牵引模块需要调控方向时,所对应方向的副磁体产生磁场,与主磁体相互配合调整牵引模块受力方向。采用主副磁体的结构,增大了磁力调控的范围,且可实现自动化反馈控制,提高磁力调控的实时性和有效性。
优选地,如图1所示,传感模块包括压力传感器;压力传感器接触被牵引目标,用于实时反馈压力信息;牵引模块包括永磁体,用于与磁场控制模块相作用,产生牵引力。
当本发明的牵引吻合装置应用于治疗肛门直肠畸形时,通过调控主磁体,进而调节体内磁场大小,可以实现在压迫不同组织结构时使用不同大小的磁力,避免磁力过大压迫过快造成出血的现象。通过调节副磁体调控磁场方向,可引导体内磁铁做多个方向的运动,以满足高位肛门闭锁压迫,形成正常直肠肛管角的需求。
优选地,如图2所示,磁场控制模块包括副磁体(编号2,3,4,5,6,7)和主磁体(编号1);副磁体分布于主磁体的四周;主磁体用于控制磁力大小;副磁体用于控制磁场方向。
优选地,永磁体外侧包裹着PC层。由于永磁体大部分为金属材料,极容易被腐蚀氧化,因此,在实际应用中,永磁体外侧包裹PC层可以避免溶液对磁体的腐蚀,本发明公开的磁吻合装置可以应用在治疗肛门直肠畸形,永磁体外侧包裹PC层,可以有效避免消化液对永磁体的腐蚀,提高了永磁体在实际应用中的安全性。
优选地,永磁体为磁能积最高的钕铁硼材料。
优选地,被牵引目标为直肠盲端。由于磁牵引吻合装置中的传感模块可以识别不同组织的压力,以精准确定括约肌中心,避免括约肌的损伤,因此,当被牵引目标为直肠盲端时,本发明公开的磁牵引吻合装置可以用于在无组织损坏的情况下,治疗肛门直肠畸形。
优选地,磁牵引吻合装置还包括牵引线,牵引线一端连接永磁体,另一端连接张力装置。
实施例
本发明提供的磁牵引吻合装置可应用于肛门直肠畸形的治疗,磁场控制模块与肛门闭锁对象的位置关系如图3所示,牵引模块、传感模块和磁场控制模块与肛门之间的位置关系如图4所示,具体应用如下:
治疗过程中首先对肛门闭锁对象进行结肠双腔造瘘,在肠镜辅助观察下经远端瘘口将传感模块放入直肠盲端,磁场控制模块的线圈阵列产生大小和方向可控的磁场,用以吸引牵引模块;传感模块反馈压力信号至磁场控制模块的线圈阵列,根据反馈的压力大小不断调整线圈阵列磁场强度,保持牵引力大小适当;在牵引力的拉动下,直肠盲端将逐渐向远端延长,当到达括约肌附近时,根据定位单元反馈的压力大小,寻找阻力最低点,由于括约肌中心阻力小于括约肌四周,因此,通过寻找阻力最低点确定括约肌环中心,调整磁场控制模块线圈阵列磁场方向正对括约肌环中心,保持磁力方向不变即可实现直肠盲端精准通过括约肌环中心;待直肠盲端通过括约肌后,以固定磁力压迫剩余脂肪及皮肤组织,完成吻合。
如图4所示,在某些特定情况下可穿线辅助牵引,将线的一端固定于体内永磁体端部,依次穿过直肠盲端、括约肌中心和肛门凹陷位置到达体外,线的另一端接张力装置,提供一定大小的拉力,辅助电磁线圈提供导向力。
综上所述,本发明提供的传感模块实时向磁场控制模块反馈压力信息,并在磁场的作用下牵引被牵引目标移动;磁场控制模块用于根据压力信息为牵引模块提供磁场的大小和方向;压力信息还可以用于识别被牵引目标的位置。可通过压力信息实时调控磁力大小及方向,结合压力信息可识别被牵引目标的位置,提高了磁牵引吻合装置定位的准确度。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种磁牵引吻合装置
- 一种用于普外科的吻合器牵引装置