并联机器人
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及一种并联(parallel link)机器人。
背景技术
已知一种配备有设置在下部空间中的马达的并联机器人(参见专利文献1)。
[现有技术文献]
[专利文献]
[专利文献1]中国专利申请公报103317726
发明内容
[本发明要解决的问题]
由于将马达设置在下部空间中,因此使下部空间受到限制。这可能会影响可加工性。
因此,本发明的目的是提供一种确保下部空间的并联机器人。
[解决问题的手段]
上述目的是通过一种并联机器人来实现的,该并联机器人包括:第一支柱、第二支柱以及第三支柱;第一可移动体、第二可移动体以及第三可移动体,所述第一可移动体、第二可移动体以及第三可移动体分别能沿着所述第一支柱、第二支柱以及第三支柱移动;末端执行器,所述末端执行器经由并行联杆从所述第一可移动体、第二可移动体以及第三可移动体悬吊,并且能响应于所述第一可移动体、第二可移动体以及第三可移动体的移动而移动;以及第一马达、第二马达以及第三马达,所述第一马达、第二马达以及第三马达用于分别移动所述第一可移动体、第二可移动体以及第三可移动体,其中,所述第一马达、第二马达以及第三马达分别被固定至所述第一支柱、第二支柱以及第三支柱的上端部。
[本发明的效果]
根据本发明,可以提供一种确保下部空间的并联机器人。
附图说明
图1是并联机器人的立体图;
图2是并联机器人的立体图;
图3是图1的马达附近的局部放大图;
图4是图2的制动机构附近的局部放大图;
图5是将带式输送机布置在两个并联机器人的下方的情况的示例性视图;
图6A是可移动体的侧视图,以及图6B是图6A的沿着线A-A截取的截面图;以及
图7A是根据变型例的并联机器人的可移动体附近的侧视图,以及图7B是图7A的沿着线B-B截取的截面图。
具体实施方式
图1和图2是并联机器人1的立体图。并联机器人1包括:支柱10a至10c、腿部20a至20c、下板30、上板40、并行联杆50a至50c、机械手60、联接板70a至70c以及马达Ma至Md。支柱10a至10c线性地延伸并且彼此并行地布置。将支柱10a至10c布置为在与支柱10a至10c延伸的方向正交的方向上彼此等距的。图1和图2例示了竖直方向D。支柱10a至10c平行于竖直方向D延伸。
将下板30固定至支柱10a至10c的下端部。将上板40固定至支柱10a至10c的上端部。下板30和上板40皆具有大致垂直于支柱10a至10c延伸的方向的平板形状。下板30在由支柱10a至10c包围的位置处具有开口31。同样,上板40具有以相同方式形成的开口41。
将腿部20a至20c固定至下板30的下表面。腿部20a至20c支承着下板30。腿部20a至20c分别穿过下板30大致定位在支柱10a至10c的正下方。将盖子Ca至Cc固定在下板30与上板40之间,以分别覆盖支柱10a至10c的外侧。下板30具有释放孔32a至32c,该释放孔用于分别释放环带Ba至Bc,如稍后所描述的。同样,上板40形成有释放孔42a至42c,但是没有构件穿过释放孔42a至42c中的各个释放孔。设置释放孔42a至42c以改善将环带Ba至Bc放置在分别由马达Ma至Mc旋转的主动轮上的可加工性。将制动机构21a至21c分别设置在腿部20a至20c中,如稍后将详细描述的。
将马达Ma至Mc分别固定至支柱10a至10c的上端部。具体地,将支柱10a和10b的上端部经由联接板70a彼此连接,将支柱10b和10c的上端部经由联接板70b彼此连接,以及将支柱10c和10a的上端部经由联接板70c彼此连接。联接板70a至70c中的各个联接板皆具有一定的厚度以及一定的宽度且线性地延伸,并且被布置成使得该宽度方向平行于竖直方向D。结果,当沿竖直方向D进行观察时,联接板70a至70c以大致等边三角形的形状布置。将马达Ma经由支架72a固定至联接板70a和70c。而且,将马达Mb经由支架72b固定至联接板70a和70b。将马达Mc经由支架72c固定至联接板70b和70c。支架72a以跨骑联接板70a和70c的方式,在联接板70a和70c的内侧固定至联接板70a和70c。支架72b和72c具有相同的布置。按这种方式,将马达Ma至Mc分别固定在支柱10a至10c的内侧。稍后将详细描述马达Ma至Mc。
马达Ma至Mc分别驱动环带Ba至Bc。环带Ba至Bc分别沿着支柱10a至10c设置在由支柱10a至10c包围的内部区域中。在本文中,将环带Ba附接至主动轮和从动轮。设置在上侧的主动轮通过马达Ma来进行旋转。设置在下侧的从动轮响应于环带Ba而被驱动。主动轮通过马达Ma来进行旋转,该马达Ma响应于从动轮的旋转而驱动环带Ba。对于环带Bb和Bc同样如此。将主动轮设置在与马达Ma的旋转轴线相同的轴线上。稍后将描述从动轮。
将可移动体17a至17c分别固定至环带Ba至Bc。可移动体17a至17c分别能沿着支柱10a至10c移动。将两个并行联杆50a的端部经由球形接头连接至可移动体17a。类似地,将两个并行联杆50b的端部经由球形接头连接至可移动体17b。将两个并行联杆50c的端部经由球形接头连接至可移动体17c。将并行联杆50a至50c的另一端连接至机械手60。具体地,机械手60包括:保持板61、三个爪62以及马达Md。将并行联杆50a至50c的另一端经由球形接头固定至保持板61。将马达Md支承在保持板61的上表面上。将爪62设置在保持板61的下表面上。马达Md驱动以打开和闭合爪62来夹持工件。机械手60是末端执行器的示例。可以采用焊机、喷枪、铆接机、吸头等,来代替机械手60。
马达Ma至Mc驱动以分别经由环带Ba至Bc使可移动体17a至17c沿着支柱10a至10c移动。这使并行联杆50a至50c的端部移动,从而在将保持板61保持在水平并行状态的同时使爪62移动至希望位置。
如上所述,将马达Ma至Mc分别布置在支柱10a至10c的上端部处。例如,如果将这样的马达Ma至Mc布置在下板30下方,则使下板30下方的空间受到限制。在这种情况下,可能难以将工件放置在这样的下部空间中。在本实施方式中,由于将马达Ma到Mc布置在上侧,因此确保了下部空间。例如,如稍后详细描述的,可以在下板30的下方布置带式输送机,以利用爪62穿过下板30的开口31来夹持由带式输送机输送的工件、将工件放在下板30上以及在下板30上的工件上执行预定的工作。以此方式,下板30的开口31也释放机械手60。
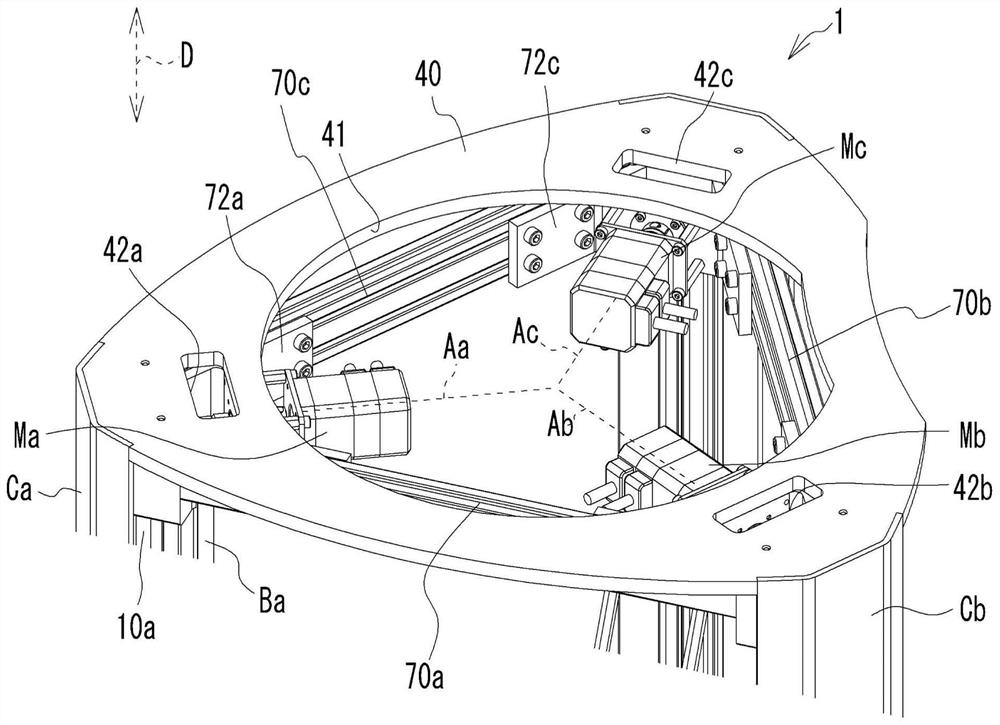
图3是图1的马达Ma至Mc附近的局部放大图。马达Ma至Mc在由支柱10a至10c包围的区域中分别被固定在支柱10a至10c的内侧。例如,与将马达Ma至Mc布置在上板40上的情况相比,并联机器人1在尺寸上减小了。而且,并联机器人1的重心位置被尽可能地降低了,从而防止并联机器人1倒下。而且,例如,当操作员将并联机器人1移动至预定位置时,可以防止操作员干扰马达Ma至Mc。
将马达Ma至Mc中的各个马达分别固定至支柱10a至10c的上端部,并且将开口41形成在设置在马达Ma至Mc上方的上板40中。这改善了马达Ma至Mc的散热。图3例示了马达Ma至Mc的相应的旋转轴线Aa至Ac。旋转轴线Aa至Ac垂直于竖直方向D。就马达Ma而言,在旋转轴线Aa的方向上的尺寸大于在垂直于旋转轴线Aa的方向上的尺寸。对于马达Mb和Mc同样如此。
图4是图2的制动机构21c附近的局部放大图。处于非通电状态的制动机构21c使附接有环带Bc的从动轮停止。处于通电状态的制动机构21c可使从动轮旋转。即,制动机构21c是非激励操作型制动器。通过停止从动轮的旋转,使环带Bc停止。对于制动机构21a和21b同样如此。
由此,将制动机构21a至21c分别成一体地设置在腿部20a至20c中。从而,抑制了部件数量的增加。例如,与将这样的制动机构成一体地设置在位于上侧的马达Ma至Mc中的情况相比,简化了马达Ma至Mc的结构,并且降低了并联机器人1的重心位置。另外,由于未将制动机构21a至21c成一体地设置在马达Ma至Mc中,因此,制动机构21a至21c提高了可维护性。
图5是将带式输送机100布置在两个并联机器人1A的下方的情况的示例性视图。应注意,为便于理解,在图5中仅用标号表示了该配置的一部分。图5的并联机器人1A采用了腿部20aA至20cA,其中各个腿部长于上述的腿部20a至20c中的各个腿部。这有利于将带式输送机100放置在下板30下方以及腿部20aA至20cA之间,如图5所示。另外,可以穿过下板30的开口31来夹持由带式输送机100输送的工件101。上述的腿部20a至20c以及腿部20aA至20aC通过诸如螺栓或螺钉的紧固构件固定至下板30。因此,容易利用较长的腿部20aA至20cA来替换腿部20a至20c。从而,按照带式输送机100的尺寸以及由带式输送机100输送的工件101的尺寸,容易利用具有合适长度的其它腿部来替换腿部。
接下来,将详细描述可移动体17a。图6A是可移动体17a的侧视图。图6B是图6A的沿线A-A截取的截面图。支柱10a包括:内侧表面111、外侧表面112、横侧表面113以及横侧表面114。内侧表面111面对由支柱10a至10c包围的内部区域,并且面对并行联杆50a和机械手60。外侧表面112位于内侧表面111的相对侧。横侧表面113和114与内侧表面111以及外侧表面112正交。将轨道部分12a固定至外侧表面112。轨道部分12a沿着支柱10a线性地延伸。
如图6B所示,当沿支柱10a所延伸的方向观察时,可移动体17a被形成为横着的U字形。可移动体17a围绕支柱10a。可移动体17a包括后壁部分172、侧壁部分173以及侧壁部分174,该后壁部分172、侧壁部分173以及侧壁部分174分别面对支柱10a的外侧表面112、横侧表面113以及横侧表面114。侧壁部分174包括从其内表面突出的固定部分175。将固定部分175固定至环带Ba。将滑块172s固定至后壁部分172的内表面。滑块172s与轨道部分12a可滑动地接合。环带Ba由马达Ma驱动,这使得固定至可移动体17a的滑块172s在轨道部分12a上滑动。这使可移动体17a移动。对于可移动体17b和17c同样如此。
以这种方式,将轨道部分12a固定至支柱10a的外侧表面112,从而将滑块172s设置在支柱10a的外侧表面112上。因此,例如,与将轨道部分12a固定至支柱10a的横侧表面113或114的情况以及将滑块172s固定至可移动体17a的侧壁部分173或174的内表面的情况相比,支柱10a和轨道部分12a的整体尺寸在绕以下中心轴线的圆周方向上减小了:该中心轴线平行于竖直方向D延伸并且穿过由支柱10a至10c包围的内部区域的中心。该圆周方向在图6B的纸张上几乎是竖直方向。对于支柱10b和10c同样如此。因此,可以确保支柱10a至10c之间的空间。这有利于将工件放置在由支柱10a至10c包围的区域上或从所述区域移除工件。
将支承并行联杆50a的球形接头部分51a分别固定至侧壁部分173和174的外表面的端部。将加强杆53a连接在侧壁部分173的内表面与侧壁部分174的内表面之间。侧壁部分173的内表面与侧壁部分173的固定有球形接头部分51a的外表面相对。侧壁部分174的内表面与侧壁部分174的固定有球形接头部分51a的外表面相对。加强杆53a面对内侧表面111,并且被布置成大致平行于水平方向。这加强了侧壁部分173的固定有球形接头部分51a的部分,以及侧壁部分174的固定有球形接头部分51a的部分。即使侧壁部分173和174的各个厚度减小,这也使得可以经由两个球形接头部分51a来稳定并支承并行联杆50a。对于并行联杆50b和50c同样如此。
接下来,将描述根据变型例的并联机器人。图7A是根据变型例的并联机器人的可移动体17aA附近的侧视图。图7B是图7A的沿着线B-B截取的截面图。关于该变型例,通过添加相同的标号,省略了与上述实施方式相同的配置的重复说明。与上述实施方式不同,轨道部分12a固定至支柱10a的内侧表面111。当沿支柱10a所延伸的方向观察时,可移动体17aA被形成为横着的U字形,如图7B所示。然而,可移动体17aA未围绕支柱10a,而是面对支柱10a的内侧表面111。可移动体17aA包括:后壁部分172A、侧壁部分173A以及侧壁部分174A。后壁部分172A、侧壁部分173A以及侧壁部分174A分别厚于上述可移动体17a的后壁部分172、侧壁部分173以及侧壁部分174。将滑块172s固定至可移动体17aA的后壁部分172A的外表面。将环带Ba固定至侧壁部分174A的内表面。与上述实施方式不同,没有设置加强杆53a。然而,侧壁部分173A和174A是厚的,由此,并行联杆50a被球形接头部分51a稳定地支承着,从而减少了部件的数量。
在这个变型例中,也将轨道部分12a固定至内侧表面111,而不是横侧表面113和114。像上述实施方式一样,由此,容易将工件放置在由支柱10a至10c包围的工作区域上和从所述工作区域移除工件。
随着将图6B与图7B进行比较,在本实施方式中,球形接头部分51a的位置更靠近支柱10a。即,在本实施方式中,与在变型例中相比,并行联杆50a的支点的位置更靠近支柱10a。这是因为在变型例中,将轨道部分12a固定至支柱10a的内侧表面111,而在本实施方式中,将轨道部分12a固定至支柱10a的外侧表面112。因此,在本实施方式中,可以确保机械手60可移动的较大区域。这提高了可加工性。
尽管已经详细地例示了本发明的示例性实施方式,但是本发明不限于上面提到的实施方式,而是可以在不脱离本发明的范围的情况下进行其它实施方式、改变和变型。
开口31具有大致圆形的形状,但不限于这样的形状和尺寸。例如,可以采用具有比上述开口31小的开口的下板,以确保下板的足够的空间用于放置组件等。而且,可以在下板中设置多个开口。
支柱10a和轨道部分12a是分开形成的,但是可以成一体地形成。
- 并联连杆机器人、并联连杆机器人用手及并联连杆机器人系统
- 并联连杆机器人系统和并联连杆机器人