一种不规则产品取出检测夹具
文献发布时间:2023-06-19 11:09:54
本发明主要涉及使用机械手自动作业产品从模具内取出的成型领域,主要功能将抱紧后取出并检测产品是否安全取出,改善特殊特殊产品无法吸盘吸取及抱具本身无法检测产品是否安全取出的缺陷的要求,为安全生产及后工序作业减轻负担,降低不良产品的产生,降低生产成本,提升生产效率。
背景技术
目前注塑生产过程由于产品多样化需求,对于不规则形状产品,无法找到合适的吸盘吸取点时,需要抱具进行产品取出,产品抱具取出为吹气功能,无法通过压力检测进行取出成功判断,易导致产品未能取出时模具损伤,从而导致生产延误和成本浪费,利用本方案取出治具可以实现产品安全取出后,从而降低生产人力投入,和模具损坏维修成本,实现生产自动取出作业,提升生产效率,提升生产品质稳定性从而实现生产效益的提升。
发明装置内容
本实用型装置主要解决目前生产中产品抱取的问题,降低生产人力耗用,提升人工效率,设备效率,避免模具损坏,特别是生产中由于模具损坏导致的生产延误,提升了企业的竞争力。
为解决以上问题,本发明提供一种抱取并检测产品是否取出的治具装置以及整个系统的安装设计;主要包括:抱具单元、产品报取失败检测单元、固定板和定位板单元,
固定板和定位板单元,主要用于所有零配件的固定定位以及和注塑机机械手臂连接固定;将离子风发生单元和真空产生单元和注塑机机械手组合,进行产品取出和除静电;
产品报取失败检测单元,利用机械手吸气检测功能连接气管至特制精具,利用精具前进后退动作密封进气口,达到检测产品是否安全抱取的功能;产品报取失败检测单元:通过文丘理管原理,产生真空吸气效果,配合电磁阀信号控制真空发生的时间点,达到一支取出治具同时可以吹气和吸气的目的。
抱具单元,将将产品从模具内抱取,达到产品取出的功能。主要利用高压电通过针装电极使空气产生正负离子风团,中和产品表面的正负电荷,达到去除产品表面静电的目的。
本发明进一步限定的技术方案为:
进一步的,抱取单元可以由至少一对抱具相互配合形成,抱具按照不同产品需求进行排布组合,实现不同产品的不同要求。
进一步的,驱动装置由机械手提供动力源,利用精具进气孔检测产品抱取是否成功。
进一步的,报具安装在机械手臂取出部位,实现抱取并检测功能。
进一步的,装置可以根据产品不同需求配置多个不同抱取方式并能很好地检测产品是否安全取出。
进一步的,装置提供的驱动需要外接机械手吹气功能一组气源和吸气功能一组气源作为动力源。
装置可以将实现特殊不规则形状产品自动取出需求,降低生产人力耗用,提升产品品质。
一种不规则产品取出检测方法,主要是利用抱具的抱取功能,通过特制精具的吸气检测,完成产品抱取和抱取检测的目的;产品注塑成型完成后,模具打开,注塑机取出机械手下降至取出侧最低点,前进至产品顶出终点位置,抱取检测精具被顶推向后,进气口密封,抱具合拢,抱紧产品,机械手后退、上升,完成产品取出这是整个工作的流程。
本发明进一步限定的技术方案为:
进一步的,第一步:将机械手吸气气管连接精具吸气孔,检查吸气功能是否工作,手动推动精具,检查精具密闭性是否异常,确保精具后退后吸气功能可以有压力检测效果;
第二步:将机械手吹气气管连接抱具吸气孔,多个用串联方式,检查吹气气功能是否工作,控制机械手吹气,确认抱具可以正常工作;
第三步:使用手动模式,调整机械手信号,调整机械手取出位置和模具顶杆顶出长度,确保机械手取出位置和顶杆顶出长度可以满足产品抱取和检测的要求;
第四步:调整为自动模式,机械手处于取出侧并下降至取出位置后,产品顶出,吸气检测功能打开,抱具抱取产品,顶针回退,机械手后,机械手上升完成产品取出;
第五步:机械手横移至下落位置,关闭吸气检测,松开抱具,产品掉落,完成产品取出功能。
不规则产品取出检测夹具有两个主要装置,另外就是气路、电路和机械手信号的调节和夹具的安装,具体流程如下:
第一步:将抱具按照产品尺寸,调整安装于固定板位置;
第二步:将检测精具安装固定板中心位置;
第三步:将抱具进气管串联,然后连接至机械手吹气出气口接口;
第四步:将精具吸气口用气管连接至机械手吸气气孔位置并检测真空吸气压力是否满足需求;
第五步:用手动模式确认抱具是否满足产品抱取需求,位置适当调整,完成抱取准备工作。
本发明的有益效果是:本发明所述的一种不规则产品取出检测夹具,不会占用太大空间,安装和清洁方便操作,不会造成环境污染,不会对人体造成伤害,噪声污染小,操作方便,工序简单,能够降低人员投入并有效提升生产效率。
附图说明:
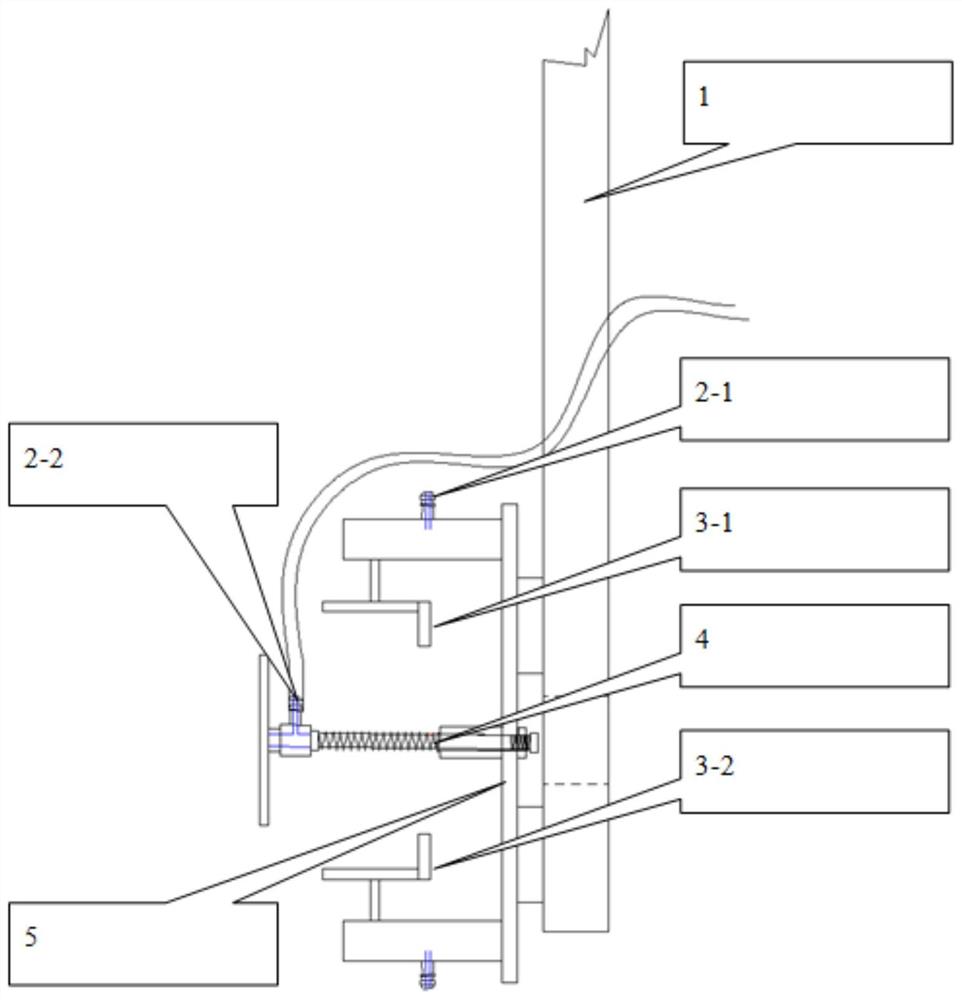
图1为夹具结构示意图;
图2为吸取精具示意图;
图3为吸取精具动作图;
图4为抱具示意图;
图5为支撑、固定板示意图。
图中:1、机械手,2-1气管接口,2-2气管接口,3-1抱具,3-2抱具,4抱具检测,5固定板。
具体实施方式
一种抱取并检测产品是否取出的治具装置以及整个系统的安装设计;主要包括:抱具单元、抱具检测4、固定板5, 装置提供的驱动需要外接机械手吹气功能一组气源和吸气功能一组气源作为动力源。驱动装置由机械手1提供动力源,利用精具进气孔检测产品抱取是否成功。装置可以根据产品不同需求配置多个不同抱取方式并能很好地检测产品是否安全取出。
固定板5,主要用于所有零配件的固定定位以及和注塑机机械手臂连接固定;
抱具检测4,利用机械手吸气检测功能连接气管至特制精具,利用精具前进后退动作密封进气口,达到检测产品是否安全抱取的功能;
抱具单元,将将产品从模具内抱取,达到产品取出的功能。抱取单元可以由至少一对抱具3-1、3-2相互配合形成,抱具按照不同产品需求进行排布组合,实现不同产品的不同要求。报具安装在机械手臂取出部位,实现抱取并检测功能。
整个装置按顺序安装好之后,检查并测试信号连接是否正确,确保各功能单独动作时能够顺利运转。
第一步:将机械手1吸气气管连接精具气管接口2-2,检查吸气功能是否工作,手动推动精具,检查精具密闭性是否异常,确保精具后退后吸气功能可以有压力检测效果;
第二步:将机械手1吹气气管连接抱具气管接口2-2,多个用串联方式,检查吹气气功能是否工作,控制机械手吹气,确认抱具可以正常工作;
第三步:使用手动模式,调整机械手信号,调整机械手1取出位置和模具顶杆顶出长度,确保机械手取出位置和顶杆顶出长度可以满足产品抱取和检测的要求;
第四步:调整为自动模式,机械手1处于取出侧并下降至取出位置后,产品顶出,吸气检测功能打开,抱具3-1和3-2抱取产品,顶针回退,机械手后,机械手上升完成产品取出;
第五步:机械手横移至下落位置,关闭吸气检测,松开抱具,产品掉落,完成产品取出功能。
- 一种不规则产品取出检测夹具
- 一种能用于不规则形状产品的具有自锁功能的夹具