高速重载机械臂
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及机器人领域,具体涉及高速重载机械臂。
背景技术
机器人的机械手臂是自动化设备不可缺少的重要组成部分,机械手臂的高效安全工作对生产和生活都有着非常重要的意义。目前,随着机械设备高速化和重载化的发展趋势,对机械手臂的工作平稳性能和安全性能提出了越来越高的要求。比如在石材加工生产过程中,需要机械臂进行大量的平动和转动或复合运动,虽然水平运动的驱动易实现高速重载驱动,而现有的旋转重载驱动的驱动力一般通过电机搭配减速器驱动或液压驱动,液压驱动虽然能满足重载驱动,但驱动速度较慢,而现有技术中电机搭配减速器驱动结构中,旋转驱动时的高速制动惯性较大,自锁性差,电机易损坏,并且转动行程控制精度不高。
发明内容
有鉴于此,本发明的目的是克服现有技术中的缺陷,提供一种高速重载机械臂,能够实现机械臂高速重载工作,并且成本低廉,结构简单紧凑。
本发明的一种高速重载机械臂,包括座体、竖向柱、悬臂、竖向驱动组件和旋转驱动组件;所述竖向柱以沿自身中心轴线单自由度转动的方式安装于座体上,所述悬臂的内端螺纹外套于竖向柱并与竖向柱垂直,竖向驱动组件包括固定于座体并与竖向柱传动配合的竖向驱动电机,所述旋转驱动组件包括旋转驱动电机、公转竖杆和公转齿圈,所述旋转驱动电机横卧并壳体以绕竖向柱中心轴线单自由度转动的方式转动安装于座体,旋转驱动电机的输出轴与公转竖杆以涡轮蜗杆的方式传动配合,旋转驱动电机的输出轴与公转竖杆之间通过一外套于连接处的垂直保持套保持稳定传动,所述悬臂内端开设有旋转驱动孔,公转竖杆转动内套于旋转驱动孔内并与悬臂沿竖向滑动配合,公转竖杆的端部固定设置有公转驱动齿轮,所述公转驱动齿轮与固定于座体的公转齿圈啮合并用于驱动公转竖杆公转。
进一步,所述公转驱动齿轮包括上公转驱动齿轮和下公转驱动齿轮,所述上、下公转驱动齿轮分别位于公转竖杆的两端且均配合设置有公转齿圈。
进一步,所述座体底部设置有转台,所述旋转驱动电机固定于转台上。
进一步,所述座体包括底板、高立板、低立板、上横板和下横板,所述高立板和低立板分列于底板的两侧,上横板固定于高立板的顶端并与固定于低立板顶端的下横板相对,所述竖向柱安装于上横板和下横板之间,下横板与高立板之间形成用于公转竖杆通过的间隙。
进一步,所述上、下公转驱所对应的公转齿圈分别固定于上横板底面和底板的顶面。
进一步,所述上横板的顶面固定设置有竖向驱动电机安装架。
进一步,所述旋转驱动孔内安装有滚珠轴承。
进一步,所述竖向柱的底部与下横板之间安装有推力轴承。
进一步,所述垂直保持套为两个垂直且中心线间隔布置固定的双套结构。
进一步,所述垂直保持套内对应杆体设置有滚珠轴承;所述公转竖杆的底端面设置有滚轮。
本发明的有益效果是:本发明公开的一种高速重载机械臂,通过利用竖向柱作为丝杆驱动悬臂升降运动,而旋转驱动电机通过涡轮蜗杆结合公转齿圈带动公转竖杆自转的同时,带动悬臂摆动,实现悬臂的旋转运动,并且升降运动和旋转运动均有自锁功能,利于实现高速重载驱动,并且控制精度高,成本低廉,结构简单紧凑。
附图说明
下面结合附图和实施例对本发明作进一步描述:
图1为本发明的结构示意图;
图2为本发明中垂直保持套的结构示意图。
具体实施方式
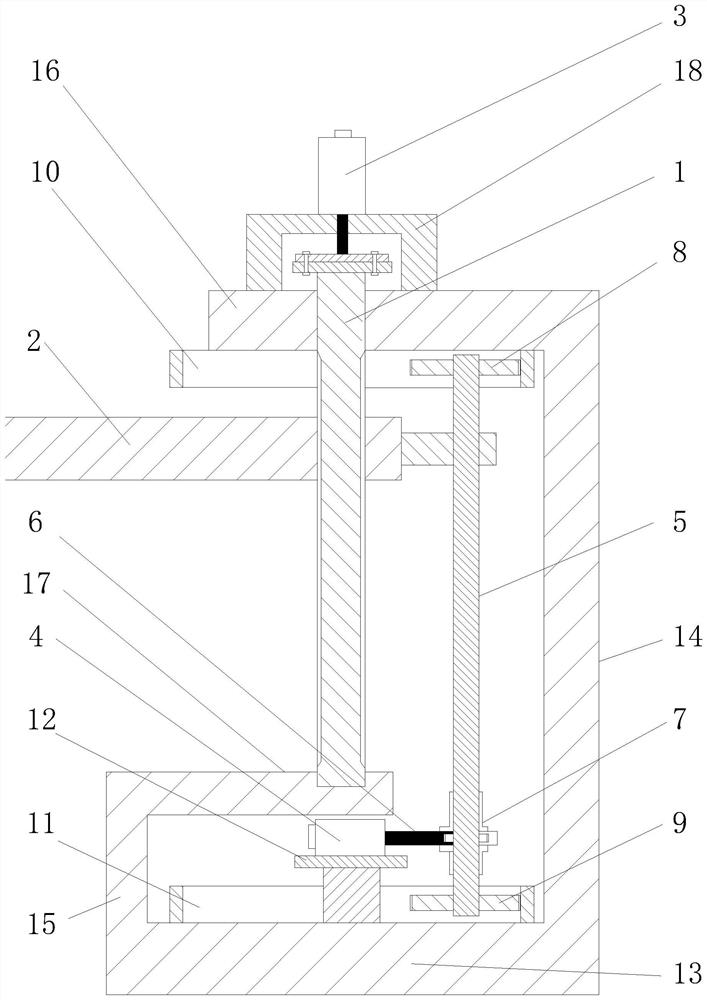
图1为本发明的结构示意图;图2为本发明中垂直保持套的结构示意图,如图所示,本实施例中的一种高速重载机械臂,包括座体、竖向柱1、悬臂2、竖向驱动组件和旋转驱动组件;所述竖向柱1以沿自身中心轴线单自由度转动的方式安装于座体上,所述悬臂2的内端螺纹外套于竖向柱1并与竖向柱1垂直,竖向驱动组件包括固定于座体并与竖向柱1传动配合的竖向驱动电机3,所述旋转驱动组件包括旋转驱动电机4、公转竖杆5和公转齿圈,所述旋转驱动电机4横卧并壳体以绕竖向柱1中心轴线单自由度转动的方式转动安装于座体,旋转驱动电机4的输出轴6与公转竖杆5以涡轮蜗杆的方式传动配合,旋转驱动电机的输出轴作为蜗杆,旋转驱动电机4的输出轴6与公转竖杆5之间通过一外套于连接处的垂直保持套7保持稳定传动,所述悬臂2内端开设有旋转驱动孔,公转竖杆5转动内套于旋转驱动孔内并与悬臂2沿竖向滑动配合,公转竖杆5的端部固定设置有公转驱动齿轮,所述公转驱动齿轮与固定于座体的公转齿圈啮合并用于驱动公转竖杆5公转;所述悬臂2的外端安装有机械爪或刀具等其他工作部件,竖向驱动电机3和旋转驱动电机4均为普通电机,通过利用竖向柱1作为丝杆驱动悬臂2升降运动,而旋转驱动电机4通过涡轮蜗杆结合公转齿圈带动公转竖杆5自转的同时,带动悬臂2摆动,实现悬臂2的旋转运动,并且升降运动和旋转运动均有自锁功能,利于实现实现高速重载驱动,并且控制精度高,成本低廉,结构简单紧凑;当然,在控制悬臂2旋转驱动时,可利用控制竖向杆自转实现对旋转控制过程中的高度变化补偿,属于现有技术,在此不再赘述。
本实施例中,所述公转驱动齿轮包括上公转驱动齿轮8和下公转驱动齿轮9,所述上、下公转驱动齿轮分别位于公转竖杆5的两端且均配合设置有公转齿圈;公转齿圈包括上公转齿圈10和下公转齿圈11,该结构利于公转竖杆5受力平衡,运行稳定,所述公转竖杆5的底端面设置有滚轮(未画出),所述滚轮为万向轮。
本实施例中,所述座体底部设置有转台12,所述旋转驱动电机4固定于转台12上。
本实施例中,所述座体包括底板13、高立板14、低立板15、上横板16和下横板17,所述高立板和低立板分列于底板的两侧,上横板固定于高立板的顶端并与固定于低立板顶端的下横板相对,所述竖向柱1安装于上横板和下横板之间,下横板与高立板之间形成用于公转竖杆5通过的间隙;所述转台位于下横板的下侧,该结构座体稳固性好,方便各零件安装。
本实施例中,所述上、下公转驱所对应的公转齿圈分别固定于上横板底面和底板的顶面;所述上横板的顶面固定设置有竖向驱动电机3安装架18;所述旋转驱动孔内安装有滚珠轴承;所述竖向柱1的底部与下横板之间安装有推力轴承;利于机械臂运行更顺畅。
本实施例中,所述垂直保持套7为两个垂直且中心线间隔布置固定的双套结构;所述垂直保持套7利于保证涡轮蜗杆传动结构的稳定性;所述垂直保持套7内对应杆体设置有滚珠轴承;当然,垂直保持套7内部也可通过现有技术设置用于防止对应各杆轴向传动的推力轴承,该推力轴承属于现有技术,在此不再赘述。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 高速重载机械臂
- 高速重载冲压机械臂控制系统