用于电动机的早期故障检测和缓解
文献发布时间:2023-06-19 11:17:41
技术领域
本部分中提供的信息是为了总体上呈现本公开的背景的目的。在本部分中所描述的程度上,当前署名的发明人的工作,以及在提交时可能在其他方面无资格作为现有技术的本说明书的各方面,均未明确地或隐含地被承认为抵触本公开的现有技术。
本公开涉及用于车辆的电动机的故障检测和缓解。
背景技术
诸如电动车辆和/或混合动力车辆之类的车辆可包括用于推进车辆的一个或多个电动机。诊断电动机故障是困难的。如果电动机失效,则可能会发生推进力损失,并且车辆的乘员可能会经历步行回家的状况。
发明内容
一种用于电动机的控制系统包括功率输入计算模块,其配置成计算所述电动机的功率输入。功率输出计算模块被配置成计算所述电动机的功率输出。功率损耗计算模块被配置成基于所述功率输入和所述功率输出来计算所述电动机中的功率损耗。故障模块被配置成将所述电动机中的所述功率损耗与一个或多个预定功率损耗阈值比较,并且基于所述比较来选择性地改变所述电动机的操作。
在其他特征中,电流传感器被配置成感测供应给所述电动机的电流。电压传感器感测供应给所述电动机的电压。所述功率输入计算模块基于供应给所述电动机的电压和电流来计算所述电动机的功率输入。转子传感器被配置成感测所述电动机的转子的速度。转矩计算模块被配置成计算所述电动机输出的转矩。所述功率输出计算模块被配置成基于所述转子的速度和所述电动机输出的转矩来计算所述电动机的功率输出。
在其他特征中,多个电流传感器相应地感测多个定子绕组电流。电流转换模块被配置成基于所述多个定子绕组电流来计算交轴(quadrature axis)电流和直轴(directaxis)电流。
在其他特征中,所述转矩计算模块被配置成基于所述交轴电流和所述直轴电流来计算所述电动机输出的转矩。当所述功率损耗小于所述一个或多个预定功率损耗阈值中的第一预定功率损耗阈值时,所述故障模块声明所述电动机是健康的。当所述功率损耗大于所述第一预定功率损耗阈值且小于所述一个或多个预定功率损耗阈值中的第二预定功率损耗阈值时,所述故障模块产生第一警告。
在其他特征中,当所述功率损耗大于所述第一预定功率损耗阈值且小于第二预定功率损耗阈值时,所述故障模块安排维护。当所述功率损耗大于所述第二预定功率损耗阈值时,所述故障模块产生第二警告并且减小所述电动机的转矩输出。
一种用于控制电动机的方法包括:计算所述电动机的功率输入;计算所述电动机的功率输出;基于所述功率输入和所述功率输出来计算所述电动机中的功率损耗;以及响应于所述电动机中的功率损耗大于一个或多个预定功率损耗阈值而改变所述电动机的操作。
在其他特征中,所述方法包括:感测供应给所述电动机的电流和电压;以及基于供应给所述电动机的电压和电流来计算所述电动机的功率输入。
在其他特征中,所述方法包括:感测所述电动机的转子的速度;计算所述电动机输出的转矩;基于所述转子的速度和所述电动机输出的转矩来计算所述电动机的功率输出;以及基于多个定子绕组电流来计算交轴电流和直轴电流。
在其他特征中,所述方法包括基于所述交轴电流和所述直轴电流来计算所述电动机输出的转矩。所述方法包括:当所述功率损耗小于所述一个或多个预定功率损耗阈值中的第一预定功率损耗阈值时,声明所述电动机是健康的。
在其他特征中,所述方法包括:当所述功率损耗大于所述第一预定功率损耗阈值且小于所述一个或多个预定功率损耗阈值中的第二预定功率损耗阈值时,产生第一警告。所述方法包括:当所述功率损耗大于所述第一预定功率损耗阈值且小于所述一个或多个预定功率损耗阈值中的第二预定功率损耗阈值时,安排维护。
在其他特征中,所述方法包括:当所述功率损耗大于所述第二预定功率损耗阈值时,产生第二警告并且减小所述电动机的转矩输出。
一种用于电动机的控制系统包括功率输入计算模块,其配置成基于供应给所述电动机的母线电压和电流来计算所述电动机的功率输入。功率输出计算模块被配置成基于所述电动机的速度和转矩输出来计算所述电动机的功率输出。功率损耗计算模块被配置成基于所述功率输入和所述功率输出来计算所述电动机中的功率损耗。故障模块被配置为将电动机中的功率损耗与一个或多个预定功率损耗阈值进行比较,并且基于该比较来选择性地改变电动机的操作。当所述功率损耗小于所述一个或多个预定功率损耗阈值中的第一预定功率损耗阈值时,所述故障模块声明所述电动机是健康的。当所述功率损耗大于所述第一预定功率损耗阈值且小于所述一个或多个预定功率损耗阈值中的第二预定功率损耗阈值时,所述故障模块执行产生第一警告和安排维护中的至少一者。当所述功率损耗大于所述第二预定功率损耗阈值时,所述故障模块产生第二警告并且减小所述电动机的转矩输出。
本发明还包括以下技术方案。
方案1. 一种用于电动机的控制系统,包括:
功率输入计算模块,其配置成计算所述电动机的功率输入;
功率输出计算模块,其配置成计算所述电动机的功率输出;
功率损耗计算模块,其配置成基于所述功率输入和所述功率输出来计算所述电动机中的功率损耗;以及
故障模块,其配置成将所述电动机中的所述功率损耗与一个或多个预定功率损耗阈值比较,并且基于所述比较来选择性地改变所述电动机的操作。
方案2. 根据方案1所述的控制系统,还包括:
电流传感器,其配置成感测供应给所述电动机的电流;以及
电压传感器,其配置成感测供应给所述电动机的电压。
方案3. 根据方案2所述的控制系统,其中,所述功率输入计算模块基于供应给所述电动机的所述电压和所述电流来计算所述电动机的所述功率输入。
方案4. 根据方案1所述的控制系统,还包括:
转子传感器,其配置成感测所述电动机的转子的速度,以及
转矩计算模块,其配置成计算所述电动机输出的转矩,
其中,所述功率输出计算模块被配置成基于所述转子的所述速度和所述电动机输出的所述转矩来计算所述电动机的所述功率输出。
方案5. 根据方案4所述的控制系统,还包括:
多个电流传感器,其相应地感测多个定子绕组电流;以及
电流转换模块,其配置成基于所述多个定子绕组电流来计算交轴电流和直轴电流。
方案6. 根据方案5所述的控制系统,其中,所述转矩计算模块被配置成基于所述交轴电流和所述直轴电流来计算所述电动机输出的所述转矩。
方案7. 根据方案1所述的控制系统,其中,当所述功率损耗小于所述一个或多个预定功率损耗阈值中的第一预定功率损耗阈值时,所述故障模块声明所述电动机是健康的。
方案8. 根据方案7所述的控制系统,其中,当所述功率损耗大于所述第一预定功率损耗阈值且小于所述一个或多个预定功率损耗阈值中的第二预定功率损耗阈值时,所述故障模块产生第一警告。
方案9. 根据方案8所述的控制系统,其中,当所述功率损耗大于所述第一预定功率损耗阈值且小于第二预定功率损耗阈值时,所述故障模块安排维护。
方案10. 根据方案8所述的控制系统,其中,当所述功率损耗大于所述第二预定功率损耗阈值时,所述故障模块产生第二警告并且减小所述电动机的转矩输出。
方案11. 一种用于控制电动机的方法,包括:
计算所述电动机的功率输入;
计算所述电动机的功率输出;
基于所述功率输入和所述功率输出来计算所述电动机中的功率损耗;以及
响应于所述电动机中的所述功率损耗大于一个或多个预定功率损耗阈值而改变所述电动机的操作。
方案12. 根据方案11所述的方法,还包括:
感测供应给所述电动机的电流和电压;以及
基于供应给所述电动机的所述电压和所述电流来计算所述电动机的所述功率输入。
方案13. 根据方案11所述的方法,还包括:
感测所述电动机的转子的速度;
计算所述电动机输出的转矩;以及
基于所述转子的所述速度和所述电动机输出的所述转矩来计算所述电动机的所述功率输出。
方案14. 根据方案13所述的方法,还包括基于多个定子绕组电流来计算交轴电流和直轴电流。
方案15. 根据方案14所述的方法,还包括基于所述交轴电流和所述直轴电流来计算所述电动机输出的所述转矩。
方案16. 根据方案11所述的方法,还包括:当所述功率损耗小于所述一个或多个预定功率损耗阈值中的第一预定功率损耗阈值时,声明所述电动机是健康的。
方案17. 根据方案16所述的方法,还包括:当所述功率损耗大于所述第一预定功率损耗阈值且小于所述一个或多个预定功率损耗阈值中的第二预定功率损耗阈值时,产生第一警告。
方案18. 根据方案17所述的方法,还包括:当所述功率损耗大于所述第一预定功率损耗阈值且小于所述一个或多个预定功率损耗阈值中的第二预定功率损耗阈值时,安排维护。
方案19. 根据方案17所述的方法,还包括:当所述功率损耗大于所述第二预定功率损耗阈值时,产生第二警告并且减小所述电动机的转矩输出。
方案20. 一种用于电动机的控制系统,包括:
功率输入计算模块,其配置成基于供应给所述电动机的母线电压和电流来计算所述电动机的功率输入;
功率输出计算模块,其配置成基于所述电动机的速度和转矩输出来计算所述电动机的功率输出;
功率损耗计算模块,其配置成基于所述功率输入和所述功率输出来计算所述电动机中的功率损耗;以及
故障模块,其配置成将所述电动机中的所述功率损耗与一个或多个预定功率损耗阈值比较,并且基于所述比较来选择性地改变所述电动机的操作,
其中,当所述功率损耗小于所述一个或多个预定功率损耗阈值中的第一预定功率损耗阈值时,所述故障模块声明所述电动机是健康的,
其中,当所述功率损耗大于所述第一预定功率损耗阈值且小于所述一个或多个预定功率损耗阈值中的第二预定功率损耗阈值时,所述故障模块执行产生第一警告和安排维护中的至少一者,以及
其中,当所述功率损耗大于所述第二预定功率损耗阈值时,所述故障模块产生第二警告并且减小所述电动机的转矩输出。
根据详细描述、权利要求和附图,本公开的适用性的其他方面将变得显而易见。详细描述和具体示例仅意在用于说明的目的,并不意在限制本公开的范围。
附图说明
通过详细描述和附图,将会更充分地理解本公开,附图中:
图1是具有绕组故障的电动机的定子绕组的示例性模型的电气示意图;
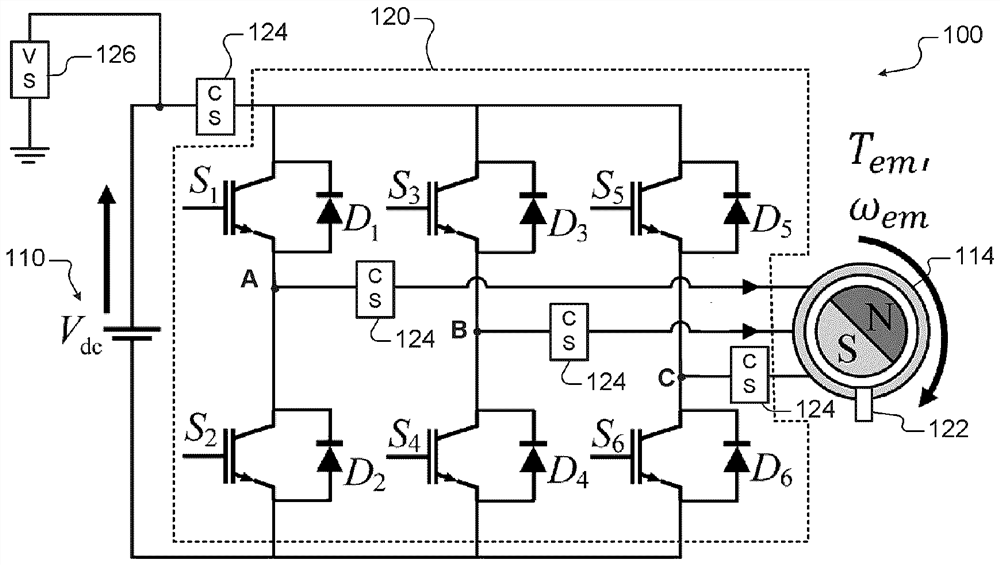
图2是具有根据本公开的用于电动机的故障检测和缓解的控制系统的一部分的示例的电气示意图和功能框图;
图3是具有根据本公开的用于电动机的故障检测和缓解的控制系统的更详细的功能框图;以及
图4是用于诊断电动机中的故障并且响应于该故障来执行缓解的方法的流程图。
在附图中,附图标记可重复用于标识相似和/或相同的元件。
具体实施方式
本公开涉及用于电动机的控制系统的故障检测和缓解策略。电动机故障的早期检测可在显著的性能下降和/或其他动力传动系统部件损伤之前执行。通过较早地执行检测,还可减少和/或避免推进力损失和/或步行回家的状况。
虽然前述公开将在永磁同步电机(PMSM)的背景下描述,但是所述系统和方法可被应用于其他类型的电机,例如感应电动机和无刷直流电动机,它们也普遍地用于汽车应用中。与具有永磁体转子以产生转子磁场的PMSM和无刷直流电动机不同,感应电动机具有导电转子,其中,在转子条中感生出转子电流和磁通,以产生磁场。
本文所述的故障检测和缓解系统和方法监测电动机的功率损耗。功率损耗是指输入功率与输出功率之间的差。电动机的输入功率基于DC母线电压和电流来计算。输出功率基于电动机转矩和转子速度来计算。
功率损耗随时间的变化可用于检测电动机的缓慢劣化。在定子绕组劣化到一定水平(或预定的功率损耗)之后,根据本公开的系统和方法实施转矩限制策略,以减轻故障的影响和/或减少对电动机和/或车辆的其他部件的进一步损伤。
本文阐述的系统和方法检测电动机故障,包括定子绕组故障和转子故障两者。对于PMSM或无刷直流电动机,转子故障通常与退磁故障有关。对于感应电动机,转子故障可能是断裂的转子条和/或短路的环。这些故障模式全都导致转矩的减小。
根据本公开的系统和方法相对早地检测电动机故障。结果,功率损耗将仅在低功率区域中(当速度和转矩相对低时)显著。
根据本公开的系统和方法检测由定子绕组故障和/或转子故障引起的电动机中的劣化。根据本公开的系统和方法计算电动机的输入功率与电动机的输出功率之间的差。该差代表电动机中的功率损耗。
根据本公开的系统和方法将该功率损耗与一个或多个预定功率损耗阈值比较。当该功率损耗超过第一功率损耗阈值时,该控制系统针对电动机故障产生听觉或视觉警告和/或安排维护。当该功率损耗超过第二功率损耗时,可采取附加的动作,例如听觉或视觉警告和/或限制电动机输出的转矩。
现在参考图1,其示出了电动机的定子绕组(各自表示为与电感器串联的电阻)。当电动机健康时,定子绕组电流i
现在参考图2,电动机系统100包括电压源110和电动机114。逆变器120被布置在电压源110和电动机114之间。逆变器120包括成对的开关(例如,S1和S2、S3和S4以及S5和S6)以及相应地跨这些成对的开关连接的成对的二极管(D1和D2、D3和D4以及D5和D6)。电动机114的定子绕组被连接到位于所述成对的开关之间的节点。
电流传感器124和电压传感器126感测供应给电动机114的DC母线电压V
现在参考图3,控制系统200包括故障检测和缓解模块202以及电动机驱动器204。电动机驱动器204基于一个或多个输入来产生用于开关S1至S6的驱动信号,如将在下面进一步描述的。故障诊断和缓解模块202估计电动机功率损耗。故障诊断和缓解模块202基于估计的电动机功率损耗来诊断电动机中的故障,并且选择性地调整电动机的一个或多个操作参数,如将在下面进一步描述的。
故障检测和缓解模块202包括转矩减小模块210,其接收电动机转矩请求并输出减小的电动机转矩请求(T
开关214基于比较器218的输出来选择电动机转矩请求T
开关214将电动机转矩请求T
求和器226和228的输出被相应地输入到比例积分(PI)模块230和232,该模块230和232将直流和正交电压命令u
功率损耗估计模块260包括功率输入计算器264、转矩计算器268、功率输出计算器272和求和器276。功率输入计算器264基于电压V
对于永磁同步电机(PMSM),T
更一般而言,T
功率输出计算器272基于转矩T
现在参考图4,其示出了用于控制电动机的方法。在310处,该方法由速度/位置传感器确定电动机速度ω
在334处,该方法计算电动机功率输入P
在346处,如果电动机功率损耗P
在350处,如果电动机功率损耗P
前述描述本质上仅仅是说明性的,并且决不意在限制本公开、其应用或用途。本公开的宽泛教导能够以多种形式实施。因此,虽然本公开包括特定示例,但本公开的实际范围不应仅限于此,这是由于依据对附图、说明书和以下权利要求的研究,其他修改将变得显而易见。应当理解的是,方法内的一个或多个步骤可按照不同的顺序(或同时地)执行,而不改变本公开的原理。此外,尽管实施例中的每一个在上文中被描述为具有某些特征,但是关于本公开的任何实施例描述的那些特征中的任何一个或多个都可在任何其他实施例中实现和/或与任何其他实施例中的特征组合,即使该组合未明确地描述。换句话说,所描述的实施例不是互斥的,并且一个或多个实施例彼此的置换仍处于本公开的范围内。
元件之间(例如,模块、电路元件、半导体层等之间)的空间和功能关系使用各种术语来描述,包括“连接”、“接合”、“耦接”、“相邻”、“旁边”、“处于顶部上”、“上方”、“下方”和“设置”。除非明确地描述为“直接”,否则在上面的公开中描述第一和第二元件之间的关系时,该关系可以是该第一和第二元件之间不存在其他中介元件的直接关系,但也可以是该第一和第二元件之间(空间上或功能上)存在一个或多个中介元件的间接关系。如本文所用的,措辞“A、B和C中的至少一个”应当被解释为意指使用非排他性逻辑OR的逻辑(A OR B ORC),并且不应被解释为意指“A中的至少一个、B中的至少一个以及C中的至少一个”。
在附图中,如箭头尖头所指示的箭头的方向通常展示该图示所关注的信息流(例如,数据或指令)。例如,当元件A和元件B交换各种信息但从元件A传输到元件B的信息与图示有关时,箭头可从元件A指向元件B。该单向箭头并不意味着没有其他信息从元件B传输到元件A。此外,对于从元件A发送到元件B的信息,元件B可将对信息的请求或接收确认发送到元件A。
在包括以下限定的本申请中,术语“模块”或术语“控制器”可用术语“电路”代替。术语“模块”可指下列各项、下列各项的一部分或者包括下列各项,即:专用集成电路(ASIC);数字、模拟或混合的模/数离散电路;数字、模拟或混合的模/数集成电路;组合式逻辑电路;现场可编程门阵列(FPGA);执行代码的处理器电路(共享的、专用的或组);存储通过处理器电路执行的代码的存储器电路(共享的、专用的或组);提供所述功能的其他合适的硬件部件;或者例如片上系统中的上述各项中的某些或全部的组合。
模块可包括一个或多个接口电路。在一些示例中,所述接口电路可包括连接到局域网(LAN)、互联网、广域网(WAN)或其组合的有线或无线的接口。本公开的任何给定模块的功能可分布在经由接口电路连接的多个模块中。例如,多个模块可允许负载平衡。在另一示例中,服务器(也称为远程或云)模块可代表客户端模块完成一些功能。
如上文中所用的术语“代码”可包括软件、固件和/或微码,并且可指程序、例程、函数、类、数据结构和/或对象。术语“共享处理器电路”涵盖执行来自多个模块的某些或全部代码的单处理器电路。术语“组处理器电路”涵盖与附加的处理器电路相结合执行来自一个或多个模块的某些或全部代码的处理器电路。对多个处理器电路的引用涵盖离散管芯上的多个处理器电路、单管芯上的多个处理器电路、单处理器电路的多个核心、单处理器电路的多个线程或者上述各项的组合。术语“共享存储器电路”涵盖存储来自多个模块的某些或全部代码的单存储器电路。术语“组存储器电路”涵盖与附加的存储器相结合存储来自一个或多个模块的某些或全部代码的存储器电路。
术语“存储器电路”是术语“计算机可读介质”的子集。如本文中所用的术语“计算机可读介质”不涵盖通过介质(例如,在载波上)传播的暂时性电信号或电磁信号;因此,术语“计算机可读介质”可被认为是有形的或非暂时性的。非暂时性、有形的计算机可读介质的非限制性示例是非易失性存储器电路(例如,闪速存储器电路、可擦除可编程只读存储器电路或掩模只读存储器电路)、易失性存储器电路(例如,静态随机存取存储器电路或动态随机存取存储器电路)、磁性存储介质(例如,模拟或数字的磁带或者硬盘驱动器)以及光存储介质(例如,CD、DVD或蓝光光盘)。
本申请中描述的设备和方法可通过专用计算机来部分或全部地实施,所述专用计算机通过将通用计算机配置成执行体现在计算机程序中的一个或多个特定功能来创建。上述的功能框、流程图部件和其他元件作为软件规范,该软件规范可通过技术人员或程序员的日常工作来转换成计算机程序。
所述计算机程序包括存储在至少一个非暂时性、有形的计算机可读介质上的处理器可执行指令。所述计算机程序还可包括或依靠所存储的数据。所述计算机程序可涵盖与专用计算机的硬件相互作用的基本输入/输出系统(BIOS)、与专用计算机的特定装置相互作用的装置驱动、一个或多个操作系统、用户应用程序、后台服务、后台应用程序等。
所述计算机程序可包括:(i)待解析的描述性文本,例如HTML(超文本标记语言)、XML(可扩展标记语言)或JSON(JavaScript对象符号);(ii)汇编代码;(iii)通过编译器由源代码生成的目标代码;(iv)供解释器执行的源代码;(v)供即时编译器编译和执行的源代码等。仅作为示例,源代码可使用来自以下语言的语法来编写,所述语言包括:C、C++、C#、Objective-C、Swift、Haskell、Go、SQL、R、Lisp、Java®、Fortran、Perl、Pascal、Curl、OCaml、Javascript®、HTML5(超文本标记语言第5版)、Ada、ASP(动态服务器网页)、PHP(PHP:超文本预处理器)、Scala、Eiffel、Smalltalk、Erlang、Ruby、Flash®、Visual Basic®、Lua、MATLAB、SIMULINK以及Python®。
- 用于电动机的早期故障检测和缓解
- 电动机控制装置、故障检测方法以及搭载了该电动机控制装置、该故障检测方法的电动助力转向装置和车辆