一种四旋翼飞行器及其控制电路
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及飞行器技术领域,具体涉及一种四旋翼飞行器及其控制电路。
背景技术
Elev-8 Quadcopter四旋翼飞行器的概念是从无人平台延伸而来的,它拥有两对螺旋桨,其中一对顺时针旋转,另一对逆时针旋转,由此来互相抵消旋翼高速旋转而产生的反扭力,四个旋翼以中心对称的方式分布在飞行器四角,由电机分布驱动。这种设计使得具有相当的灵活性,并且增加旋翼的数量可使旋翼面积显著地减小,也使得飞行器的结构比传统直升机更加紧凑。无人机技术在海湾战争之后有了长足的发展并广泛地应用在各个方面,并不局限于军事方面。
目前技术成熟的四旋翼飞行器被应用在许多领域,例如,军事中巷战这种人员损失惨重的战斗机类型使用四旋翼飞行器侦查环境形势、敌人分布位置;反恐行动中监视恐怖分子的行为,为狙击手提供实时的战场信息;民用中使用四旋翼飞行器进行高压电力线寻线,管道、铁路沿途情况、航拍等等;还可以在火灾、水灾、地震、核事故等等情况中提供灾情的实施实况。总之,从各个方面来说都有很高的应用价值。
典型的传统直升机配备有一个主转子和一个尾浆,但也存在其他类型的直升机,如双转轴或串列式直升机,同轴直升机等。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。而Elev-8Quadcopter与此不同,是通过调节四个电机转速来改变螺旋桨速度,实现升力的变化,从而控制飞行器的姿态和位置。Elev-8 Quadcopter没有自动倾斜器,其整机升力由四个电机提供。由于飞行器是通过改变螺旋桨速度实现升力变化,这样会导致其动力不稳定,所以需要一种能够确保长期稳定的控制方法。
发明内容
本发明的目的在于克服上述技术不足,提供一种四旋翼飞行器及其控制电路,解决现有技术中四旋翼飞行器飞行不稳定的技术问题。
为达到上述技术目的,本发明采取了以下技术方案:
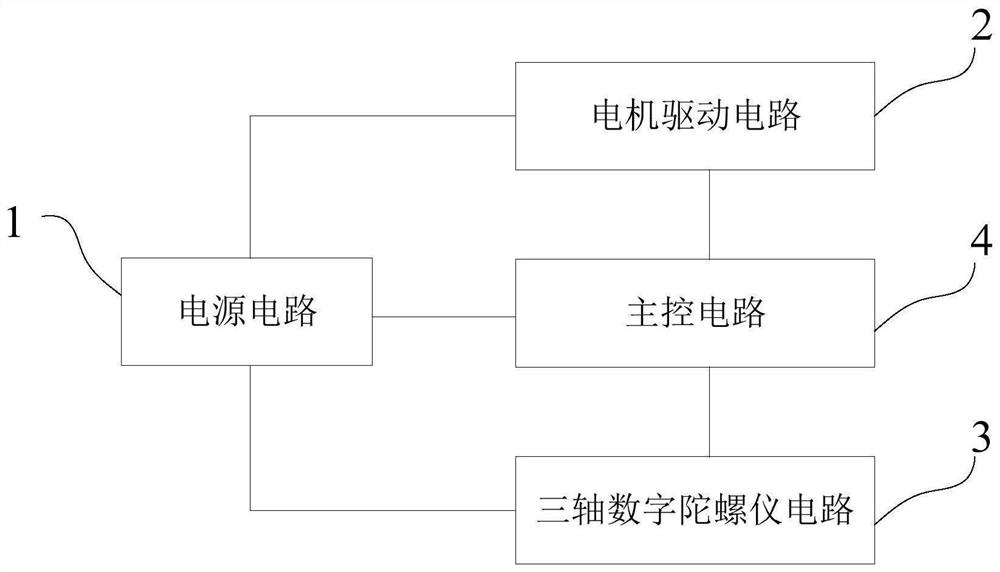
第一方面,本发明提供一种四旋翼飞行器的控制电路,包括电源电路、电机驱动电路、三轴数字陀螺仪电路和主控电路,所述电源电路与所述电机驱动电路、三轴数字陀螺仪电路和主控电路电连接,所述主控电路还与所述电机驱动电路和三轴数字陀螺仪电路电连接,其中,
所述电源电路用于给所述电机驱动电路、三轴数字陀螺仪电路和主控电路提供电源;
所述三轴数字陀螺仪电路用于采集所述四旋翼飞行器的位姿信号;
所述主控电路用于根据所述三轴数字陀螺仪电路采集的位姿信号发送调速信号至所述电机驱动电路;
所述电机驱动电路用于根据所述调速信号控制各个电机的动作。
优选的,所述的四旋翼飞行器的控制电路中,所述主控电路包括Propeller微控制器、晶振和第一电容,所述Propeller微控制器的P3端、P2端、P1端、P0端、P31端、P30端、P27端和P26端均连接所述电机驱动电路,所述Propeller微控制器的VDD3端连接所述电源电路和所述第一电容的一端,所述第一电容的另一端接地,所述Propeller微控制器的P14端、P15端和P16端均连接所述三轴数字陀螺仪电路,所述Propeller微控制器的X0端连接所述晶振的一端,所述Propeller微控制器的C1端连接所述晶振的另一端。
优选的,所述的四旋翼飞行器的控制电路中,所述三轴数字陀螺仪电路包括三轴陀螺仪、第一电阻、第二电阻、第二电容、第三电容、第四电容和第五电容,所述三轴陀螺仪的SDA端连接所述Propeller微控制器的P15端和第一电阻的一端,所述三轴陀螺仪的SCL端连接所述Propeller微控制器的P16端和第二电阻的一端,所述第一电阻的另一端和第二电阻的另一端均连接所述电源电路,所述三轴陀螺仪的CPOUT端通过第二电容接地,所述三轴陀螺仪的VDD端连接第三电容的一端和所述电源电路,所述第三电容的另一端接地,所述三轴陀螺仪的ULOGIC端连接所述第四电容的一端和所述电源电路,所述第四电容的另一端接地,所述三轴陀螺仪的REGOUT端通过第五电容接地,所述三轴陀螺仪的INT端连接所述Propeller微控制器的P14端。
优选的,所述的四旋翼飞行器的控制电路中,所述电机驱动电路包括电平转换单元和电机驱动单元,所述电平转换单元连接所述Propeller微控制器的P3端、P2端、P1端、P0端、P31端、P30端、P27端和P26端,所述电平转换单元与所述电机驱动单元电连接,所述电平转换单元用于对所述Propeller微控制器输出的调速信号进行电平转换,所述电机驱动单元用于根据所述电平转换后的调速信号控制各个电机动作。
优选的,所述的四旋翼飞行器的控制电路中,所述电平转换单元包括电平转换芯片、第三电阻和第六电容,所述电平转换芯片的A1端、A2端、A3端、A4端、A5端、A6端、A7端和A8端分别连接所述Propeller微控制器的P3端、P2端、P1端、P0端、P31端、P30端、P27端和P26端,所述电平转换芯片的DE端通过第三电阻连接所述电源电路,所述电平转换芯片的VCCA端连接所述电源电路和第六电容的一端,所述第六电容的另一端接地,所述电平转换芯片的B1端、B2端、B7端和B8分别连接一电机的一端,所述电平转换芯片的B3端、B4端、B5端和B6端均连接所述电机驱动单元。
优选的,所述的四旋翼飞行器的控制电路中,所述电机驱动单元包括一电机驱动芯片,所述电机驱动芯片的P24端、P18端、P12端和P6端分别连接所述电平转换芯片的B3端、B4端、B5端和B6端,所述电机驱动芯片的P23端、P17端、P11端和P5端分别连接一电机的另一端。
优选的,所述的四旋翼飞行器的控制电路中,所述电源电路包括第四电阻、第七电容、第八电容、第一二极管和稳压器,所述第四电阻的一端连接5V电源,所述第四电阻的另一端连接第一二极管的正极和第七电容的一端,所述第七电容的另一端接地,所述第一二极管的负极连接所述稳压器的VIN端,所述稳压器的VOUT端连接所述第八电容的一端、所述Propeller微控制器的VDD3端、所述第一电阻的另一端、第二电阻的另一端、所述三轴陀螺仪的VDD端、所述三轴陀螺仪的ULOGIC端以及所述电平转换芯片的VCCA端、并通过所述第三电阻连接所述电平转换芯片的DE端,所述第八电容的另一端接地。
优选的,所述的四旋翼飞行器的控制电路还包括USB转串口电路,所述USB转串口电路用于将外界USB信号转换为串口信号后,输出至所述主控电路,其中,
所述USB转串口电路包括USB转串口驱动芯片、第九电容、第十电容、第五电阻和第一三极管,所述USB转串口驱动芯片的RXD端和TXD端均连接所述主控电路,所述USB转串口驱动芯片的VCC端、USBDM端和USBDP端均连接USB接口,所述USB转串口驱动芯片的3V3OUT端和VCCIO端均通过第九电容接地,所述USB转串口驱动芯片的DTR端连接第十电容的一端,所述第十电容的另一端连接第一三极管的基极和第五电阻的一端,所述第五电阻的另一端和第一三极管的发射极均接地,所述第一三极管的集电极连接所述主控电路。
优选的,所述的四旋翼飞行器的控制电路还包括指示电路,所述指示电路用于指示所述四旋翼飞行器的工作状态,所述指示电路包括LED指示器、第六电阻、第七电阻和第八电阻,所述LED指示器的RED端通过第六电阻连接所述主控电路,所述LED指示器的BLU端通过第七电阻连接所述主控电路,所述LED指示器的GRN端通过第八电阻连接所述主控电路。
第二方面,本发明提供一种四旋翼飞行器,包括如上所述的四旋翼飞行器的控制电路。
与现有技术相比,本发明提供的四旋翼飞行器及其控制电路,通过利用三轴数字陀螺仪电路来采集四旋翼飞行器的位姿信号,然后利用所述主控电路对所述位姿信号进行分析后,发出调速信号至所述电机驱动电路,使所述电机驱动电路按照所述调速信号驱动各个电机动作,从而使得各个所述电机可以按照预定的飞行模式进行飞行,避免出现飞行器动力不稳定的情况,保证四旋翼飞行器的稳定飞行。
附图说明
图1是本发明提供的四旋翼飞行器的控制电路的一较佳实施例的结构框图;
图2是本发明提供的四旋翼飞行器向前飞行的一较佳实施例的结构示意图;
图3是本发明提供的四旋翼飞行器向左飞行的一较佳实施例的结构示意图;
图4是本发明提供的四旋翼飞行器升高飞行的一较佳实施例的结构示意图;
图5是本发明提供的四旋翼飞行器向左偏航飞行的一较佳实施例的结构示意图;
图6是本发明提供的四旋翼飞行器的一较佳实施例的结构示意图;
图7是本发明提供的四旋翼飞行器的控制电路中,所述主控电路的一较佳实施例的原理图;
图8是本发明提供的四旋翼飞行器的控制电路中,所述三轴数字陀螺仪电路的一较佳实施例的原理图;
图9是本发明提供的四旋翼飞行器的控制电路中,所述电机驱动电路的一较佳实施例的原理图;
图10是本发明提供的四旋翼飞行器的控制电路中,所述电源电路的一较佳实施例的原理图;
图11是本发明提供的四旋翼飞行器的控制电路中,所述USB转串口电路的一较佳实施例的原理图;
图12是本发明提供的四旋翼飞行器的控制电路中,所述指示电路的一较佳实施例的原理图;
图13是本发明提供的四旋翼飞行器的控制电路中,所述蜂鸣器电路的一较佳实施例的原理图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请参阅图1,,本发明实施例提供的四旋翼飞行器的控制电路,包括电源电路1、电机驱动电路2、三轴数字陀螺仪电路3和主控电路4,所述电源电路1与所述电机驱动电路2、三轴数字陀螺仪电路3和主控电路4电连接,所述主控电路4还与所述电机驱动电路2和三轴数字陀螺仪电路3电连接。
具体的,所述电源电路1用于给所述电机驱动电路2、三轴数字陀螺仪电路3和主控电路4提供电源,具体的,所述电源电路用于将输入的电源转化为3.3V电源后,给所述电机驱动电路2、三轴数字陀螺仪电路3和主控电路4供电,保证所述电机驱动电路2、三轴数字陀螺仪电路3和主控电路4的稳定运行。
所述三轴数字陀螺仪电路3用于采集所述四旋翼飞行器的位姿信号,所述位姿信号用于反映所述四旋翼飞行器的横滚角、俯仰角和航向角等角度信息,通过采集所述四旋翼飞行器的位姿信号可以使所述主控电路4根据所述位姿信号进行四旋翼飞行器的位姿调节,以保证所述四旋翼飞行器的稳定飞行。
所述主控电路4用于根据所述三轴数字陀螺仪电路3采集的位姿信号发送调速信号至所述电机驱动电路2具体的,当所述三轴数字陀螺仪电路3采集到位姿信号后,所述主控电路4根据所述三轴数字陀螺仪电路3采集的位姿信号以及预设的位姿信号判断所述四旋翼飞行器的位姿是否正确,从而根据所述位姿信号来调整所述四旋翼飞行器的位姿,以保证所述四旋翼飞行器的稳定飞行。
所述电机驱动电路2用于根据所述主控电路43发送的调速信号来控制各个所述电机的动作,具体的,请参阅图2至图6,所述四旋翼飞行器具有四个电机,对称分布在主体四个方向,且旋翼处于同一水平面,旋翼半径、规格都相同,其中处于同一轴上的两个旋翼旋转方向相反,具体实施时,暂时设定其中一个旋翼为机头,则相间的旋翼为机尾,相邻的旋翼位于左侧的为左旋翼,右侧的为由旋翼。减小机头旋翼的速度同时增大机尾旋翼的转速可以使机身前倾,若持续保持这一姿态,旋翼推力在水平方向上产生的分量可以使飞行器向前飞行如图2所示,向后飞行同理。减小左侧旋翼的转速同时增大右侧旋翼的转速可以使机身向左侧倾斜,保持这一姿态则旋翼推力在水平方向上的分量可以使飞行器向左飞行如图3所示,向右飞行同理。同步增加四个旋翼的转速可以升高飞行器高度如图4所示,同步减小则降低高度。同步增加相间旋翼转速并减小另一组相间旋翼转速,则可以利用旋翼件的扭力不平衡使飞行器向左偏航如图5所示,向右偏航同理。
本发明通过利用三轴数字陀螺仪电路3来采集四旋翼飞行器的位姿信号,然后利用所述主控电路4对所述位姿信号进行分析后,发出调速信号至所述电机驱动电路2,使所述电机驱动电路2按照所述调速信号驱动各个电机动作,从而使得各个所述电机可以按照预定的飞行模式进行飞行,避免出现飞行器动力不稳定的情况,保证四旋翼飞行器的稳定飞行。
请继续参阅图7,所述主控电路4包括Propeller微控制器U1、晶振X1和第一电容C1,所述Propeller微控制器U1的P3端、P2端、P1端、P0端、P31端、P30端、P27端和P26端均连接所述电机驱动电路2,所述Propeller微控制器U1的VDD3端连接所述电源电路1和所述第一电容C1的一端,所述第一电容C1的另一端接地,所述Propeller微控制器U1的P14端、P15端和P16端均连接所述三轴数字陀螺仪电路3,所述Propeller微控制器U1的X0端连接所述晶振X1的一端,所述Propeller微控制器U1的C1端连接所述晶振X1的另一端。
具体的,所述Propeller微控制器U1是Propeller P8X32A单片机控制板,具有八个32位内核,可以提供难以置信的力量和灵活性。所述Propeller微控制器U1用于接收所述三轴数字陀螺仪电路3发送的位姿信号,然后根据所述位姿信号生成所述调速信号,以使各个所述电机根据所述调速信号进行调速后,使所述四旋翼飞行器按照预设的飞行模式进行飞行,避免所述四旋翼飞行器出现飞行不稳定的状况。
请继续参阅图8,所述三轴数字陀螺仪电路3包括三轴陀螺仪U2、第一电阻R1、第二电阻R2、第二电容C2、第三电容C3、第四电容C4和第五电容C5,所述三轴陀螺仪U2的SDA端连接所述Propeller微控制器U1的P15端和第一电阻R1的一端,所述三轴陀螺仪U2的SCL端连接所述Propeller微控制器U1的P16端和第二电阻R2的一端,所述第一电阻R1的另一端和第二电阻R2的另一端均连接所述电源电路1,所述三轴陀螺仪U2的CPOUT端通过第二电容C2接地,所述三轴陀螺仪U2的VDD端连接第三电容C3的一端和所述电源电路1,所述第三电容C3的另一端接地,所述三轴陀螺仪U2的ULOGIC端连接所述第四电容C4的一端和所述电源电路1,所述第四电容C4的另一端接地,所述三轴陀螺仪U2的REGOUT端通过第五电容C5接地,所述三轴陀螺仪U2的INT端连接所述Propeller微控制器U1的P14端。
具体的,第一电阻R1和第二电阻R2为上拉电阻,所述第二电容C2、第三电容C3、第四电容C4和第五电容C5起滤波作用,所述三轴陀螺仪U2用于采集所述四旋翼飞行器的位姿信号,并将所述位姿信号发送给所述Propeller微控制器U1,以使所述Propeller微控制器U1对所述位姿信号进行分析后,控制各个电机的动作,使所述四旋翼飞行器实现不同的飞行状态。优选的实施例中,所述三轴陀螺仪U2的型号为MPU6050,性能稳定,而且响应速度快,当然,在其它的实施例中,所述三轴陀螺仪U2还可采用其它的型号,本发明对此不做限定。
请参阅图9,所述电机驱动电路2包括电平转换单元21和电机驱动单元22,所述电平转换单元21连接所述Propeller微控制器U1的P3端、P2端、P1端、P0端、P31端、P30端、P27端和P26端,所述电平转换单元21与所述电机驱动单元22电连接,所述电平转换单元21用于对所述Propeller微控制器U1输出的调速信号进行电平转换,所述电机驱动单元22用于根据所述电平转换后的调速信号控制各个电机动作。
具体来说,由于所述Propeller微控制器U1输出的调速信号无法直接驱动电机驱动单元22,故在调速信号发送至所述电机驱动单元22之前,还需要对所述调速信号进行电平转换,以使所述电机驱动单元22可以接收到合适电平的调速信号后,驱动各个电机动作。
请继续参阅图9,所述电平转换单元21包括电平转换芯片U3、第三电阻R3和第六电容C6,所述电平转换芯片U3的A1端、A2端、A3端、A4端、A5端、A6端、A7端和A8端分别连接所述Propeller微控制器U1的P3端、P2端、P1端、P0端、P31端、P30端、P27端和P26端,所述电平转换芯片U3的DE端通过第三电阻R3连接所述电源电路1,所述电平转换芯片U3的VCCA端连接所述电源电路1和第六电容C6的一端,所述第六电容C6的另一端接地,所述电平转换芯片U3的B1端、B2端、B7端和B8分别连接一电机,所述电平转换芯片U3的B3端、B4端、B5端和B6端均连接所述电机驱动单元22。
具体来说,所述电平转换芯片U3可将所述Propeller微控制器U1发送的四组调速信号进行电平转换,具体实施时,将所述Propeller微控制器U1发送的1.8V的信号转换为3.3V信号后发送至所述电机驱动单元22,以使所述电机驱动单元22驱动各个所述电机动作。
请继续参阅图9,所述电机驱动单元22包括一电机驱动芯片U4,所述电机驱动芯片U4的P24端、P18端、P12端和P6端分别连接所述电平转换芯片U3的B3端、B4端、B5端和B6端,所述电机驱动芯片U4的P23端、P17端、P11端和P5端分别连接一电机的另一端。
具体的,所述电机驱动芯片U4可接收电平转换后的调速信号,然后分别利用一引脚来发出控制信号至各个所述电机,以使各个所述电机对应进行调速,进而驱动各个电机实现不同动作后,使所述四旋翼飞行器实现不同的状态。
请参阅图10,所述电源电路1包括第四电阻R4、第七电容C7、第八电容C8、第一二极管D1和稳压器U5,所述第四电阻R4的一端连接5V电源,所述第四电阻R4的另一端连接第一二极管D1的正极和第七电容C7的一端,所述第七电容C7的另一端接地,所述第一二极管D1的负极连接所述稳压器U4的VIN端,所述稳压器U4的VOUT端连接所述第八电容C8的一端、所述Propeller微控制器U1的VDD3端、所述第一电阻R1的另一端、第二电阻R2的另一端、所述三轴陀螺仪U2的VDD端、所述三轴陀螺仪U2的ULOGIC端以及所述电平转换芯片U3的VCCA端、并通过所述第三电阻R3连接所述电平转换芯片U3的DE端,所述第八电容C8的另一端接地。
具体的,所述第四电阻R4为上拉电阻,所述第七电容C7、第八电容弄C8和第一二极管D1均起滤波保护作用,所述稳压器U4用于将5V电源转换为3.3V电源后,给各个模块电路供电,以保证电源的稳定性。
请参阅图11,所述四旋翼飞行器的控制电路还包括USB转串口电路,所述USB转串口电路用于将外界USB信号转换为串口信号后,输出至所述主控电路4,其中,所述USB转串口电路包括USB转串口驱动芯片U6、第九电容C9、第十电容C10、第五电阻R5和第一三极管Q1,所述USB转串口驱动芯片U6的RXD端和TXD端均连接所述主控电路1,具体分别连接所述Propeller微控制器U1的P30端和P31端,所述USB转串口驱动芯片U6的VCC端、USBDM端和USBDP端均连接USB接口,所述USB转串口驱动芯片U6的3V3OUT端和VCCIO端均通过第九电容C9接地,所述USB转串口驱动芯片U6的DTR端连接第十电容C10的一端,所述第十电容C10的另一端连接第一三极管Q1的基极和第五电阻R5的一端,所述第五电阻R5的另一端和第一三极管Q1的发射极均接地,所述第一三极管Q1的集电极连接所述主控电路4,具体连接所述Propeller微控制器U1的RES端。
具体来说,所述USB转串口驱动芯片U6用于将USB信号转换为串口信号,当外部信号输入时,首先经过所述USB转串口驱动芯片U6的转换,然后输出串口信号至Propeller微控制器U1,所述Propeller微控制器U1根据输入的信号以及三轴陀螺仪U2采集的位姿信号来对应进行四旋翼飞行器位姿的调整。具体实施时,所述USB转串口驱动芯片U6可采用型号为FT232RL的芯片,当然,在其它的实施例中,所述USB转串口驱动芯片U6还可采用其它型号的芯片,本发明对此不作限定。
请参阅图12,所述四旋翼飞行器的控制电路还包括指示电路,所述指示电路用于指示所述四旋翼飞行器的工作状态,所述指示电路包括LED指示器U7、第六电阻R6、第七电阻R7和第八电阻R8,所述LED指示器U7的RED端通过第六电阻R6连接所述主控电路1,具体连接所述Propeller微控制器U1的P5端,所述LED指示器U7的BLU端通过第七电阻R7连接所述主控电路1,具体连接所述Propeller微控制器U1的P4端,所述LED指示器U7的GRN端通过第八电阻连接所述主控电路1,具体连接所述Propeller微控制器U1的P6端。
具体来说,所述LED指示器U7可实现三种不同的状态,即发出红蓝绿三种光,每种光对应四旋翼飞行器的不同工作状态,通过所述Propeller微控制器U1发出的不同信号,实现所述四旋翼飞行器的不同工作状态指示,从而方便工作人员实时获取四旋翼飞行器的工作状态。
进一步的,如图13所示,所述四旋翼飞行器的控制电路还包括蜂鸣器电路,所述蜂鸣器电路用于实现所述四旋翼飞行器的报警,当所述四旋翼飞行器的工作异常时,所述蜂鸣器电路发出报警信号提示用户,以使用户快速做出反应。所述蜂鸣器电路的具体原理如图13所示,与所述Propeller微控制器U1的P7端连接,在此不再赘述。
基于上述四旋翼飞行器的控制电路,本发明还相应的提供一种四旋翼飞行器,包括如上述各实施例所述的四旋翼飞行器的控制电路。所述四旋翼飞行器的控制电路具备的技术效果,所述四旋翼飞行器同样具备,故在此不再赘述。
综上所述,本发明提供的四旋翼飞行器及其控制电路,通过利用三轴数字陀螺仪电路来采集四旋翼飞行器的位姿信号,然后利用所述主控电路对所述位姿信号进行分析后,发出调速信号至所述电机驱动电路,使所述电机驱动电路按照所述调速信号驱动各个电机动作,从而使得各个所述电机可以按照预定的飞行模式进行飞行,避免出现飞行器动力不稳定的情况,保证四旋翼飞行器的稳定飞行。
以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
- 一种四旋翼飞行器及其控制电路
- 一种多功能四旋翼飞行器