一种扑翼飞行器
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及飞行器技术领域,具体涉及一种扑翼飞行器。
背景技术
昆虫和鸟类经过几千万年的漫长进化过程,获得了令人惊叹的飞行技巧,它们的扑翼飞行能力在很多方面远远超出了人类已有的飞行器。与传统的固定翼飞行和旋翼飞行相比,扑翼飞行通过模仿鸟类或昆虫飞行,扑动翅膀产生升力和动力,实现非常高效的仿生扑翼飞行运动,这为飞行器制造打开新思路;
近年来,飞行器受到越来越多人的喜爱,特别是扑翼飞行器,因其通常具有尺寸小、噪音弱、隐蔽性好等特点,使得其在民用和军用等方面均有极大的应用前景和发展空间;
然而国内对于研究扑翼飞行机器人的起步比较晚,大多数的高校大多主要从事于扑翼飞行机器人的理论研究和控制器方面,在工程领域投入力度相比较国外来说要小很多,现有的飞行器无法适应不同的条件下应用。
发明内容
本发明针对上述问题,提供一种扑翼飞行器,解决了现有的飞行器无法在不同的条件下应用的问题。
本发明采用的技术方案为:一种扑翼飞行器,包括固定板、齿轮传动机构、翅膀机构、支撑杆及尾翼机构;
所述固定板下侧安装有齿轮传动机构,所述齿轮传动机构上安装有翅膀机构;
所述齿轮传动机构通过电机驱动;
所述固定板上侧横向安装有支撑杆,所述支撑杆另一端安装有尾翼机构。
进一步地,所述齿轮传动机构包括第一凸柱传动齿轮、第二凸柱传动齿轮、第二叠加齿轮和第一叠加齿轮,所述固定板下侧安装有第一叠加齿轮,所述第一叠加齿轮上啮合安装有第二叠加齿轮,所述第二叠加齿轮上啮合安装有第一凸柱传动齿轮,所述第一凸柱传动齿轮一侧啮合安装有第二凸柱传动齿轮,所述电机的输出轴套设有动力齿轮,动力齿轮与第一叠加齿轮啮合连接。
更进一步地,所述翅膀机构包括连动杆、主翼铰链机构、V型连杆、辅翼短臂折杆、固定横梁和斜板横梁;所述第一凸柱传动齿轮和第二凸柱传动齿轮上分别安装有连动杆第一端,两个所述连动杆第二端分别安装有主翼铰链机构第一端,两个所述主翼铰链机构第二端分别安装有辅翼短臂折杆;
两个所述主翼铰链机构与第一叠加齿轮之间安装有V型连杆;
所述支撑杆上套设有固定横梁,所述固定横梁两端分别安装有斜板横梁第一端,两个所述斜板横梁第二端分别与两个辅翼短臂折杆连接。
更进一步地,所述支撑杆上套设有挂板,所述挂板设置在固定横梁前端,所述电机安装在挂板上。
更进一步地,所述尾翼结构包括尾翼支座、尾翼蹼和尾翼舵机;所述支撑杆尾端安装有尾翼支座,所述尾翼支座通过尾翼舵机安装有尾翼蹼。
更进一步地,所述主翼铰链机构包括平行设置固定杆和连接杆,所述固定杆两端分别与连动杆第二端上侧壁、辅翼短臂折杆前端上侧壁转动连接,所述连接杆两端分别与连动杆第二端下侧壁、辅翼短臂折杆前端下侧壁转动连接。
更进一步地,两个所述斜板横梁第二端分别与两个辅翼短臂折杆后端上壁转动连接。
本发明的优点:
本发明提供了一种扑翼飞行器,为仿生扑翼结构,从整体上看,该机械结构小,其主要的飞行动力是靠翅膀的扇动,利用空气的浮力飞行,极大的减少了能量损耗,以及充分减少自身的重量;在飞行的过程中,利用扑翼的飞行方式,会比旋翼或者固定机翼更加灵活,可以出入一些其他机构无法进入地方;在自然界中,该机构也可以做为观察机使用,能很好的融入到飞行生物的群体中;从飞行的效率的角度,扑翼的飞行效率在同等的条件下会比其他的飞行方式要高一些,不仅利用扑翼飞行,同时也应用了电机的辅助,而且本机构的尾翼采用双翼蹼的结构,能够更好的产生上升的浮力,能够加强飞行的距离。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
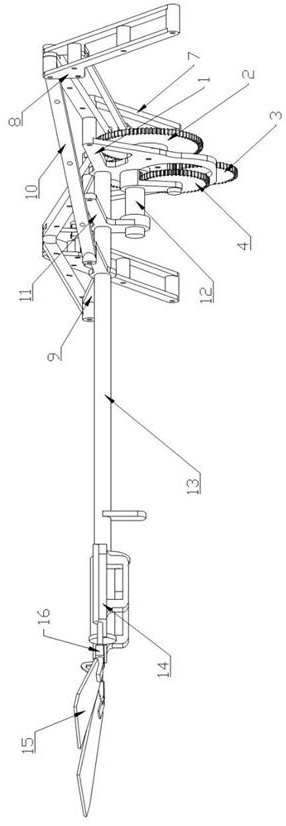
图1是本发明的整体结构侧视图;
图2是本发明的整体结构俯视图;
图3是本发明的整体结构正视图;
图4是本发明的齿轮传动机构结构示意图;
图5是本发明的翅膀机构结构示意图;
图6是本发明的固定横梁安装示意图;
图7是本发明的斜板横梁安装示意图;
图8是本发明的支撑杆安装示意图;
图9是本发明的尾翼机构结构示意图。
附图标记:
1-固定板、2-第二凸柱传动齿轮、3-第二叠加齿轮、4-第一叠加齿轮、5-连动杆、6-主翼铰链机构、7-V型连杆、8-辅翼短臂折杆、9-固定横梁、10-斜板横梁、11-挂板、12-电机、13-支撑杆、14-尾翼支座、15-尾翼蹼、16-尾翼舵机;
61-固定杆、62-连接杆。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参考图1至图9,一种扑翼飞行器,包括固定板1、齿轮传动机构、翅膀机构、支撑杆13及尾翼机构;
固定板1下侧安装有齿轮传动机构,齿轮传动机构通过电机12驱动;齿轮传动机构包括第一凸柱传动齿轮、第二凸柱传动齿轮2、第二叠加齿轮3和第一叠加齿轮4,固定板1下侧安装有转动连接的第一叠加齿轮4,即电机12的输出轴上套设有动力齿轮,动力齿轮与第一叠加齿轮4啮合连接,驱动第一叠加齿轮4转动,第一叠加齿轮4的叠加齿轮上啮合安装有第二叠加齿轮3,第二叠加齿轮3的叠加齿轮上啮合安装有第一凸柱传动齿轮,第一凸柱传动齿轮一侧啮合安装有第二凸柱传动齿轮2;第一凸柱传动齿轮、第二凸柱传动齿轮2、第二叠加齿轮3和第一叠加齿轮4均转动连接的安装在固定板1上;
齿轮传动机构上安装有翅膀机构;翅膀机构包括连动杆5、主翼铰链机构6、V型连杆7、辅翼短臂折杆8、固定横梁9和斜板横梁10;第一凸柱传动齿轮和第二凸柱传动齿轮2上分别安装有转动连接的连动杆5第一端,两个连动杆5第二端分别安装有转动连接的主翼铰链机构6第一端,两个主翼铰链机构6第二端分别安装有转动连接的辅翼短臂折杆8;
两个主翼铰链机构6与第一叠加齿轮4之间安装有V型连杆7;V型连杆7的V字顶端分别与两个主翼铰链机构6转动连接,V型连杆7的V字底端与第一叠加齿轮4转动连接;
固定板1上侧横向固定安装有支撑杆13,支撑杆13上套设有固定横梁9,固定横梁9两端分别安装有斜板横梁10第一端,两个斜板横梁10第二端分别与两个辅翼短臂折杆8转动连接;支撑杆13另一端安装有尾翼机构;尾翼结构包括尾翼支座14、尾翼蹼15和尾翼舵机16;支撑杆13尾端安装有尾翼支座14,尾翼支座14通过尾翼舵机16安装有尾翼蹼15,尾翼舵机16的固定端以杆连接在尾翼支座14,输出端连接尾翼蹼15,尾翼舵机16驱动尾翼蹼15运动。
本发明提供了一种扑翼飞行器,尾翼舵机16和电机12均为市售的,电机12为空心杯电机,该扑翼飞行器是以固定板1为机架和13支撑杆为支撑,搭建整个结构;以固定板1为机架,将第一凸柱传动齿轮、第二凸柱传动齿轮2、第二叠加齿轮3和第一叠加齿轮4固定在固定板1上,通过电机12的输入,动力齿轮与第一叠加齿轮4啮合连接,驱动第一叠加齿轮4转动,使得第一叠加齿轮4带动第二叠加齿轮3转动,利用第二叠加齿轮3转动来带动第一凸柱传动齿轮和第二凸柱传动齿轮2转动,行程多级减速,从而达到整个传动的效果;
两个连动杆5装套在第一凸柱传动齿轮和第二凸柱传动齿轮2上,主翼铰链机构6一端安装在连动杆5上,另一端安装在辅翼短臂折杆8上,V型连杆7分别安装在两个主翼铰链机构6和第一叠加齿轮4上,固定横梁9固定在该飞行机构的支撑杆13上,斜板横梁10一端固定在固定横梁9上,另一端安装在辅翼短臂折杆8上,通过固定横梁9以及斜板横梁10将翅膀固定于水平位置并限定其X方向的自由度,通过V型连杆7将两侧主翼铰链机构6固定以及限制第一凸柱传动齿轮和第二凸柱传动齿轮2脱轨,同时也限定了机翼结构的Y方向的自由度;通过第一凸柱传动齿轮和第二凸柱传动齿轮2的转动,带动连动杆5的转动,利用连动杆5控制主翼铰链机构6的上极限角度和下极限角度,并行成往复运动;主翼铰链机构6的第二端部连接了辅翼短臂折杆8,在扇动的过程中,主翼铰链机构6的上下平行杆件控制辅翼短臂折杆8的上下极限角度,且辅翼短臂折杆8的扇动方向与主翼铰链机构6扇动方向相反;飞行的过程中利用的过程主翼铰链机构6和辅翼短臂折杆8支撑起整个机构的飞行升力;
尾翼支座14连接在支撑杆13上,以支撑杆14为主要支撑点,承受尾翼的主体重量,尾翼舵机16的固定端以杆连接在尾翼支座14,输出端连接尾翼蹼15,利用程序控制16尾翼舵机的旋转角度及转速,使得15尾翼蹼在一定的范围内上下摆动;
尾翼舵机16连接在单片机的主控板上,在单片机的中写入控制转角和速度的程序,利用远程的遥控,控制舵机的驱动器的最大正向旋转角度及最大负向旋转角度,并根据不同的环境情况调整最大正向和最大负向的角度。速度的控制是利用程序的指令,首先选择所需要的角度,接着调整摆动的频率大小,以此达到控制摆动的速度。
本发明的一实施例中,支撑杆13上套设有挂板11,挂板11设置在固定横梁9前端,电机12安装在挂板11上,电机12固定在挂板11上并为整个机构输入动力能量,通过支撑杆13将固定横梁9、挂板11和14尾翼支座连接在同一水平位置。
本发明的一实施例中,主翼铰链机构6包括平行设置固定杆61和连接杆62,固定杆61两端分别与连动杆5第二端上侧壁、辅翼短臂折杆8前端上侧壁转动连接,连接杆62两端分别与连动杆5第二端下侧壁、辅翼短臂折杆8前端下侧壁转动连接,V型连杆7的V字顶端分别与两个固定杆61转动连接。
本发明的一实施例中,两个斜板横梁10第二端分别与两个辅翼短臂折杆8后端上壁转动连接,方便进一步辅翼短臂折杆8的运动。
本发明提供了一种扑翼飞行器,为仿生扑翼结构,从整体上看,该机械结构小,其主要的飞行动力是靠翅膀的扇动,利用空气的浮力飞行,极大的减少了能量损耗,以及充分减少自身的重量;在飞行的过程中,利用扑翼的飞行方式,会比旋翼或者固定机翼更加灵活,可以出入一些其他机构无法进入地方;在自然界中,该机构也可以做为观察机使用,能很好的融入到飞行生物的群体中;从飞行的效率的角度,扑翼的飞行效率在同等的条件下会比其他的飞行方式要高一些,不仅利用扑翼飞行,同时也应用了电机12的辅助,而且本机构的尾翼采用双翼蹼的结构,能够更好的产生上升的浮力,能够加强飞行的距离。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种扑翼飞行器的三维扑翼机构及微型扑翼飞行器
- 一种舵机驱动的扑翼飞行器及扑翼飞行器驱动方法