一种超广角激光扫描系统
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及激光扫描技术领域,具体涉及一种结构简单、应用广泛的超广角激光扫描系统。
背景技术
近年来随着激光扫描测量的不断发展,诞生了例如激光雷达、激光扫描仪等非接触测量仪器,广泛应用于三维建模、测绘、安防、自动驾驶等领域。激光扫描测量系统根据不同的应用需求可以实现不同的测量范围和测量精度。
激光扫描组件是激光扫描测量系统中的重要组成部分,现在常用的扫描器件有旋转多边形棱镜、微机电系统(MEMS)振镜等。其中,旋转多边形棱镜可以改变激光的出射方向实现大角度扫描,但其尺寸大、成本高和功耗高。MEMS振镜具有体积小、重量低、功耗小等优点,在激光扫描系统中得到广泛的应用和发展,典型的MEMS振镜为1维和2维谐振型振镜。然而以2维谐振型振镜为基础的激光扫描技术,其成本较高,且扫描视场有限,大部分的谐振型振镜的光学转角难以超过30°,难以实现大的扫描视场。现有基于MEMS振镜的混合固态激光雷达多采用设置多个发射和接收模块或多镜组的光学扩束系统实现超广角的激光扫描,但是这些都会增加了系统加工和调试的难度,提高了成本。
发明内容
本发明是为避免上述现有激光扫描技术所存在的不足之处,提供一种结构简单、低成本的一种超广角激光扫描系统设计方案。
为了实现上述目的,本发明采用的技术方案为:
一种超广角激光扫描系统,所述激光扫描系统通过曲面反射镜的线性运动实现0-180°范围的扫描视场角。该系统包括激光发射和接收单元,平面反射单元和曲面反射单元三个部分。所述激光发射和接收单元用于出射准直激光束并接收回波激光束;所述平面反射单元用于将发射单元出射的准直激光束水平反射至曲面反射单元;所述曲面反射镜通过线性运动使平面反射单元射入的水平激光束以0-180°的角度范围反射至外界。
所述超广角激光扫描系统的曲面反射单元以线性运动方式在竖直向往复运动,以使入射激光束与所述曲面反射单元的相对位置发生变化,从而以不同的入射角入射,并以0-180°范围内的偏转角出射,实现超广角的激光扫描。
所述超广角激光扫描系统的平面反射单元以线性运动方式在水平向往复运动,以使入射到曲面反射单元的激光束在水平方向的位置产生变化。
所述超广角激光扫描系统可以通过控制器控制平面反射单元和曲面反射单元在各自的驱动器驱动下分别进行线性运动,x向扫描通过曲面反射单元的线性运动实现,y向扫描则通过平面反射单元的线性运动实现,进而实现逐行的二维超广角激光扫描。
所述超广角激光扫描系统可通过选择不同驱动速度和精度的驱动器和控制器,实现不同的扫描范围和扫描精度,可应用于例如激光雷达和激光扫描仪等类似的应用场景。
与已有技术相比,本发明有益效果体现在:
1. 通过曲面反射镜的线性运动使入射激光束和反射激光束之间的偏转角在0-180°范围内变化,无需复杂的光学扩束系统;
2. 通过平面反射单元的线性运动使曲面反射单元的入射激光束在横向平移,平面反射单元和曲面反射单元配合线性运动,实现二维超广角激光扫描;
3. 通过选择不同驱动速度和精度的驱动器和控制器,实现不同的扫描范围和扫描精度。
附图说明
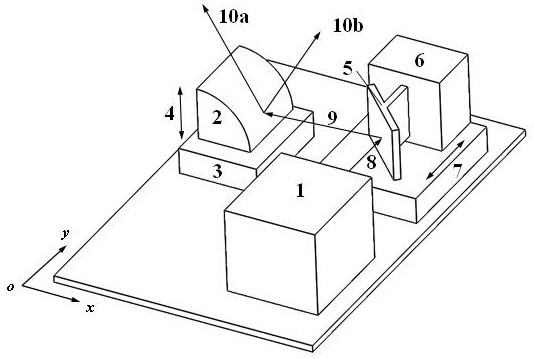
图1是本发明示出的一种超广角激光扫描系统的结构示意图;
图2是本发明示出的曲面反射镜对入射激光束偏转效果的示意图;
图3是本发明逐行的二维超广角激光扫描效果示意图。
具体实施方式
为使本发明的上述目的、特征和优点能够更直观易懂,下面结合附图对本发明的具体实施方式做详细的说明。需要说明的是,本申请实施例提供的技术方案以1/4圆柱面反射镜作为曲面反射单元,并以音圈电机作为驱动器进行详细说明,在具体实施时,可根据实际应用场景更换不同的曲面反射镜和驱动器,以实现不同x向视角、以及扫描频率和范围的需求。因此,技术人员具体实施时可在权利要求范围内进行修改,本实施例不代表本发明的唯一实施方式。
本发明的超广角激光扫描系统的具体实施方式如图1所示,主要包括激光发射和接收单元1,平面反射单元8和曲面反射单元2三个部分。所述激光发射和接收单元1用于出射准直激光束并接收回波激光束;所述平面反射单元8用于将发射单元出射的准直激光束水平反射至曲面反射单元2;所述曲面反射镜通过第一音圈电机3的线性运动使平面反射单元射入的水平激光束以0-180°的角度范围反射至外界。
如图2所示,超广角激光扫描系统的曲面反射单元2在第一音圈电机3的驱动下以线性运动方式在竖直向往复运动4,以使入射激光束9与所述曲面反射单元2的相对位置发生变化,从而以不同的入射角入射,并以0-180°范围内的偏转角出射,实现超广角的激光扫描。
超广角激光扫描系统的平面反射单元8在第二音圈电机6的驱动下以线性运动方式在水平向往复运动7,以使入射到曲面反射单元的激光束9在水平方向的位置产生变化。
如图3所示,超广角激光扫描系统可以通过控制器控制平面反射单元8和曲面反射单元2分别在第二音圈电机6和第一音圈电机3的驱动下进行线性运动,x向扫描通过曲面反射单元2的线性运动4实现,y向扫描则通过平面反射单元8的线性运动7实现,进而实现逐行的二维超广角激光扫描。
尽管已经示出和描述了本发明的实施例,对于本领域的技术人员,可以在不脱离本发明的原理和精神的情况下对实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种超广角激光扫描系统
- 一种细长激光束光学组件和一种激光扫描系统