一种面向智能工厂的液晶屏缺陷在线检测系统
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及在线检测系统,具体为一种面向智能工厂的液晶屏缺陷在线检测系统。
背景技术
随着近年来电子设备的高速发展,智能设备中的液晶屏应用越来越广泛,液晶屏的质量直接关系到企业的生存发展,而液晶屏在生产制造过程中,不可避免的出现质量问题,其中,缺陷检测是液晶屏的质量控制的重要一环,其良品率直接关系到整个生产线的智能制造水平,同时,制造成本的增加、用工荒问题的加剧、供应链端的考验等问题日益严峻,因此,研究面向智能工厂的液晶屏缺陷在线检测方法,对于提高企业生产效率,促进“机器换人”在生产线中的应用具有十分重要的意义。
目前,液晶屏的缺陷检测主要有两种方法,传统的人工检测方法和基于机器视觉的液晶屏检测方法,主要针对液晶屏外观和焊点等相关检测。传统的人工检测方法主要依靠人眼观察,检测效率低,主观性强,鲁棒性差,并且无法达到统一的标准,容易出现漏检和误检。随着机器视觉检测技术的进一步发展,目前已经具有相关的检测方法实现液晶屏外观和焊点的检测,但是主要采用离线方式进行,对于不合格产品进行人工分拣,无法实现智能流水线的在线检测需求,不能满足智能工厂的要求。
发明内容
针对上述情况,为克服现有技术的缺陷,本发明提供一种面向智能工厂的液晶屏缺陷在线检测系统,有效的解决了上述技术背景中提到的问题。
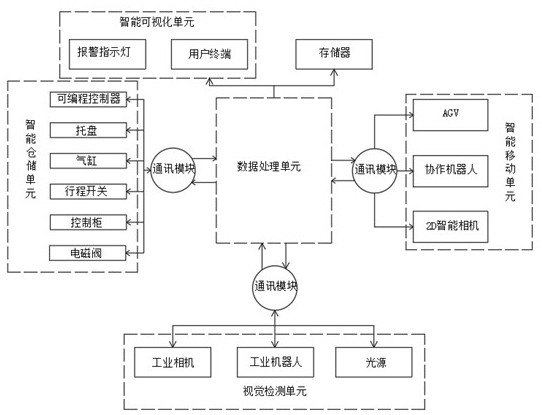
为实现上述目的,本发明提供如下技术方案:本发明包括数据处理单元、智能移动单元、视觉检测单元、智能仓储单元和智能可视化单元,所述数据处理单元:包括中央处理器、存储器、用户终端和通信模块,中央处理器分别与存储器、用户终端和通信模块连接,统一放置在设备控制柜中;
智能移动单元:包括AGV移动小车、协作机器人、2D智能相机、机械吸盘、控制柜以及机械连接结构,其中协作机器人安装到AGV移动小车上,与AGV移动小车一起运动,2D智能相机与机械吸盘安装到协作机器人末端,通过2D智能相机,实现目标的定位,通过机械吸盘与2D相机的定位实现目标的抓取操作;
视觉检测单元:由工业相机、光源、工业机器人、机械吸盘及控制电路组成,工业相机安装到检测位置的正上方,光源安装到工业相机两侧,工业机器人安装到视觉检测平台上,机械吸盘安装到工业机器人末端,控制电路主要包括嵌入式控制系统及相关数据传输电路;
智能仓储单元:由托盘、气缸、可编程控制器、电磁阀、行程开关和控制柜组成,托盘安装到气缸末端,可以跟随气缸弹出,可编程控制器及电磁阀安装到控制柜中,行程开关安装到气缸末端,可以检测气缸弹出是否到位;
智能可视化单元:包括用户终端模块和报警指示灯,用户终端模块连接到数据处理单元并且接收各个模块的相关信息,报警指示灯连接到数据处理单元。
根据上述技术方案:所述可编程控制器用来完成智能仓储单元模块的相关控制动作,通过控制电磁阀实现气缸的运动,并且通过相关的行程开关检测气缸是否到位。
根据上述技术方案:所述光源采用条形光,配合工业相机实现图像的提取。
根据上述技术方案:所述工业相机通过CCD或CMOS成像传感器将镜头产生的光学像转换为对应的模拟或数字信号,采用工业相机进行液晶屏显示字符的图像采集工作,并且通过通讯模块连接到数据处理单元,从而进行图像的处理。
根据上述技术方案:所述工业机器人是一种多用途的、可重复编程的、广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人末端安装吸盘,用于吸附液晶屏,并且为了精确识别液晶屏的位置,末端同时安装智能相机实现液晶屏的精确定位。
根据上述技术方案:所述协作机器人是智能工厂的必要设备,能够实现机器人与人之间的协同运作,液晶屏属于易碎物品,检测运输中可能需要人工干预,因此需要采用协作机器人实现,并且协作机器人末端装有智能相机,能够实现液晶屏的精确定位。
根据上述技术方案:所述AGV移动小车,是无人驾驶,AGV前端装有摄像头,可以实现视觉SLAM地图创建和自动导航,AGV上面载有协作机器人和液晶屏存放平台,可以保障液晶屏运输到指定位置。
根据上述技术方案:所述电磁阀主要用于接收可编程控制的信号,控制气路的通断,从而控制气缸的弹出与缩回,配合智能移动单元实现液晶屏物料的自动取放。
有益效果:本发明使用时,系统通过数据处理单元发送指令给智能仓储单元中的可编程控制器和智能移动单元中的AGV小车,AGV小车运动到指定仓储位置后反馈给数据处理单元,智能仓储单元按照接收到的指令,控制相关的气缸运动,推出待检测的液晶屏,协作机器人开始运动到指定位置,通过2D智能相机进行定位抓取液晶屏,抓取完成后通知数据处理单元,AGV小车运行到视觉检测单元,放置到待检测区并且通知数据处理单元,数据处理单元发送相关指令到视觉检测单元的控制系统,控制系统控制工业机器人抓取并且放置到检测位置,检测完成后,通过控制系统控制工业机器人放置到指定位置并且通过通讯模块发送指令给数据处理单元,AGV小车移动到指定位置,通过协作机器人和2D智能相机,将检测液晶屏放回智能仓储单元,通过数据处理单元分析,得到当前液晶屏的检测情况,存入存储器,并且送到用户终端进行显示,本发明结构新颖,构思巧妙,装置采用功能单元模块化设计,便于对液晶屏缺陷进行在线检测,可靠性强,适应性强,易推广;搭建视觉检测单元,将图像检测算法、视觉定位与机器人配合使用,实现机器换人,提高生产效率,降低误检率,建立智能工厂的地图导航模型,将经验知识和数学模型应用于AGV小车的实际运动情况分析,配合协作机器人和智能相机实现液晶屏检测的智能仓储、智能搬运和视觉检测。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
图1是本发明整体框图;
图2是本发明系统布局图。
具体实施方式
下面结合附图1-2对本发明的具体实施方式做进一步详细说明。
实施例,由图1-2给出,本发明提供一种面向智能工厂的液晶屏缺陷在线检测系统,包括数据处理单元、智能移动单元、视觉检测单元、智能仓储单元和智能可视化单元,所述数据处理单元:包括中央处理器、存储器、用户终端和通信模块,中央处理器分别与存储器、用户终端和通信模块连接,统一放置在设备控制柜中;
智能移动单元:包括AGV移动小车、协作机器人、2D智能相机、机械吸盘、控制柜以及机械连接结构,其中协作机器人安装到AGV移动小车上,与AGV移动小车一起运动,2D智能相机与机械吸盘安装到协作机器人末端,通过2D智能相机,实现目标的定位,通过机械吸盘与2D相机的定位实现目标的抓取操作;
视觉检测单元:由工业相机、光源、工业机器人、机械吸盘及控制电路组成,工业相机安装到检测位置的正上方,光源安装到工业相机两侧,工业机器人安装到视觉检测平台上,机械吸盘安装到工业机器人末端,控制电路主要包括嵌入式控制系统及相关数据传输电路;
智能仓储单元:由托盘、气缸、可编程控制器、电磁阀、行程开关和控制柜组成,托盘安装到气缸末端,可以跟随气缸弹出,可编程控制器及电磁阀安装到控制柜中,行程开关安装到气缸末端,可以检测气缸弹出是否到位;
智能可视化单元:包括用户终端模块和报警指示灯,用户终端模块连接到数据处理单元并且接收各个模块的相关信息,报警指示灯连接到数据处理单元。
所述可编程控制器用来完成智能仓储单元模块的相关控制动作,通过控制电磁阀实现气缸的运动,并且通过相关的行程开关检测气缸是否到位。
所述光源采用条形光,配合工业相机实现图像的提取。
所述工业相机通过CCD或CMOS成像传感器将镜头产生的光学像转换为对应的模拟或数字信号,采用工业相机进行液晶屏显示字符的图像采集工作,并且通过通讯模块连接到数据处理单元,从而进行图像的处理。
所述工业机器人是一种多用途的、可重复编程的、广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人末端安装吸盘,用于吸附液晶屏,并且为了精确识别液晶屏的位置,末端同时安装智能相机实现液晶屏的精确定位。
所述协作机器人是智能工厂的必要设备,能够实现机器人与人之间的协同运作,液晶屏属于易碎物品,检测运输中可能需要人工干预,因此需要采用协作机器人实现,并且协作机器人末端装有智能相机,能够实现液晶屏的精确定位。
所述AGV移动小车,是无人驾驶,AGV前端装有摄像头,可以实现视觉SLAM地图创建和自动导航,AGV上面载有协作机器人和液晶屏存放平台,可以保障液晶屏运输到指定位置。
所述电磁阀主要用于接收可编程控制的信号,控制气路的通断,从而控制气缸的弹出与缩回,配合智能移动单元实现液晶屏物料的自动取放。
工作原理:本发明使用时,系统通过数据处理单元发送指令给智能仓储单元中的可编程控制器和智能移动单元中的AGV小车,AGV小车运动到指定仓储位置后反馈给数据处理单元,智能仓储单元按照接收到的指令,控制相关的气缸运动,推出待检测的液晶屏,协作机器人开始运动到指定位置,通过2D智能相机进行定位抓取液晶屏,抓取完成后通知数据处理单元,AGV小车运行到视觉检测单元,放置到待检测区并且通知数据处理单元,数据处理单元发送相关指令到视觉检测单元的控制系统,控制系统控制工业机器人抓取并且放置到检测位置,检测完成后,通过控制系统控制工业机器人放置到指定位置并且通过通讯模块发送指令给数据处理单元,AGV小车移动到指定位置,通过协作机器人和2D智能相机,将检测液晶屏放回智能仓储单元,通过数据处理单元分析,得到当前液晶屏的检测情况,存入存储器,并且送到用户终端进行显示。
有益效果:本发明结构新颖,构思巧妙,装置采用功能单元模块化设计,便于对液晶屏缺陷进行在线检测,可靠性强,适应性强,易推广;搭建视觉检测单元,将图像检测算法、视觉定位与机器人配合使用,实现机器换人,提高生产效率,降低误检率,建立智能工厂的地图导航模型,将经验知识和数学模型应用于AGV小车的实际运动情况分析,配合协作机器人和智能相机实现液晶屏检测的智能仓储、智能搬运和视觉检测。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种面向智能工厂的液晶屏缺陷在线检测系统
- 一种关于液晶屏外观缺陷在线检测系统