行车辅助方法及车载装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及一种车载装置及其辅助方法,且特别涉及一种搭配动态感测器的行车辅助方法及车载装置。
背景技术
随着技术的发展,车载装置已从原先仅单纯提供音乐播放及车辆状态发展出更多功能。通过微机电系统(Micro Electro-Mechanical Systems,MEMS)使得关键零件可以做得越来越微小,而运算效能直线上升,让车载装置得以整合原本各自独立的影音系统、导航系统、行车记录及主/被动行车安全系统等,发展至此应用功能越来越多元化。而如何应用车载装置来提高行车安全则是其中课题之一。
发明内容
本发明提供一种行车辅助方法及车载装置,可提高行车的安全性。
本发明的行车辅助方法,包括:判断是否接收到操作指令;在判定接收到操作指令时,通过动态感测器来判断动态目标物的位置;以及基于动态目标物的位置来决定是否执行操作指令对应的操作。
在本发明的一实施例中,判断是否接收到操作指令的步骤包括:判断是否自中控台面板接收到操作指令。
在本发明的一实施例中,在判断是否自中控台面板接收到操作指令的步骤之后,还包括:在判定自中控台面板接收到操作指令的情况下,判断目前时速是否大于第一预设值;当目前时速大于第一预设值时,通过动态感测器来判断动态目标物的位置;以及当目前时速未大于第一预设值时,直接执行操作指令对应的操作。
在本发明的一实施例中,当目前时速大于第一预设值时,包括:当基于动态目标物的位置判定动态目标物为副驾驶时,执行操作指令对应的操作;以及当基于动态目标物的位置判定动态目标物并非为副驾驶时,拒绝执行操作指令对应的操作。
在本发明的一实施例中,判断是否接收到操作指令的步骤包括:判断是否自制动器接收到操作指令。
在本发明的一实施例中,在判断是否自制动器接收到操作指令的步骤之后,还包括:在判定自制动器接收到操作指令的情况下,判断目前时速是否小于第二预设值;当目前时速小于第二预设值时,通过动态感测器来判断动态目标物的位置;以及当目前时速不小于第二预设值时,拒绝执行操作指令对应的操作。
在本发明的一实施例中,当目前时速小于第二预设值时,包括:当基于动态目标物的位置判定动态目标物为驾驶时,执行操作指令对应的操作;以及当基于动态目标物的位置判定动态目标物并非为驾驶时,拒绝执行操作指令对应的操作。
在本发明的一实施例中,所述行车辅助方法还包括:通过动态感测器检测驾驶的视线方向是否转向指定方向;在检测到驾驶的视线方向转向指定方向时,通过动态感测器判断指定区域是否被遮蔽;以及在判定指定区域被遮蔽时,发出警示信号。
本发明的车载装置,包括:动态感测器;以及处理器,耦接至动态感测器,且经配置以:判断是否接收到操作指令;在判定接收到操作指令时,通过动态感测器来判断动态目标物的位置;以及基于动态目标物的位置来决定是否执行操作指令对应的操作。
本发明的行车辅助方法,包括:通过动态感测器检测驾驶的视线方向是否转向指定方向;在检测到驾驶的视线方向转向指定方向时,通过动态感测器判断指定区域是否被遮蔽;以及在判定指定区域被遮蔽时,发出警示信号。
基于上述,利用动态感测器来判断操作者的动作,借此来决定是否执行对应的操作,进而提高行车的安全性。
附图说明
图1是依照本发明一实施例的车载装置的方框图。
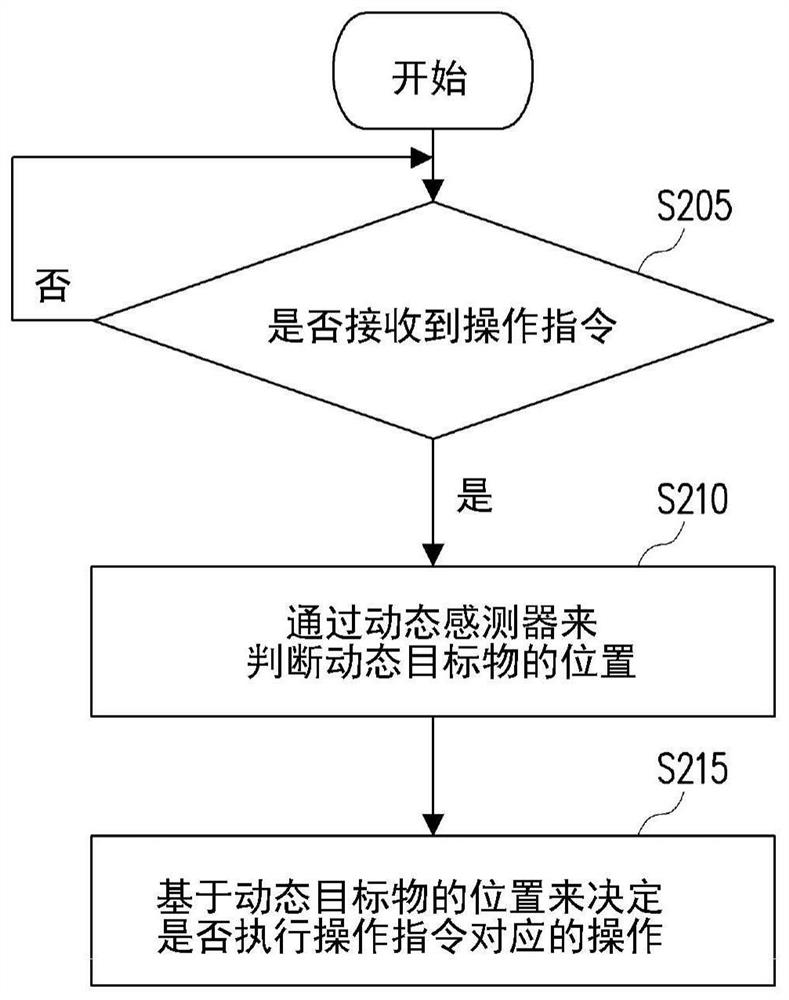
图2是依照本发明一实施例的行车辅助方法的流程图。
图3是依照本发明一实施例的行车辅助方法的流程图。
图4是依照本发明一实施例的操作中控台面板的示意图。
图5是依照本发明一实施例的行车辅助方法的流程图。
图6是依照本发明一实施例的行车辅助方法的流程图。
附图标记说明:
100:车载装置
110:动态感测器
111:影像识别单元
113:判断单元
120:处理器
130:中控台面板
140:控制模块
410:右侧范围
U:手
S205~S215:本发明一实施例的行车辅助方法的各步骤
S305~S325:本发明一实施例的行车辅助方法的各步骤
S505~S525:本发明一实施例的行车辅助方法的各步骤
S605~S615:本发明一实施例的行车辅助方法的各步骤
具体实施方式
图1是依照本发明一实施例的车载装置的方框图。请参照图1,车载装置100包括动态感测器110、处理器120、中控台面板130以及控制模块140。处理器120耦接至动态感测器110、中控台面板130以及控制模块140。
在本实施例中,动态感测器110为影像获取装置,其例如是采用电荷耦合元件(Charge coupled device,CCD)镜头、互补式金属氧化物半导体晶体管(Complementarymetal oxide semiconductor transistors,CMOS)镜头的摄影机、照相机等,用以获取影像。
动态感测器110中还包括了影像识别单元111以及判断单元113。就实作上而言,影像识别单元111以及判断单元113可以是独立的运算芯片。另外,影像识别单元111以及判断单元113也可以是由程序码片段所组成,通过动态感测器110的控制芯片来执行。
动态感测器110在获取影像之后,通过影像识别单元111来进行分析及识别,借此找出影像中的动态目标物。之后,通过判断单元113来进一步判断动态目标物的位置。
处理器120例如为中央处理单元(Central Processing Unit,CPU)、物理处理单元(Physics Processing Unit,PPU)、可程序化的微处理器(Microprocessor)、嵌入式控制芯片、数字信号处理器(Digital Signal Processor,DSP)、特殊应用集成电路(ApplicationSpecific Integrated Circuits,ASIC)或其他类似装置。
中控台面板130包括多个按钮,通过这些按钮来控制空调、音响、导航系统等功能。
控制模块140用以自处理器120接收指令,且依指令来开放或关闭相关操作以及发出警示信号。控制模块140例如是由一或多个程序码片段所组成,存储在存储单元(未示出)中,经由处理器120来执行。所述存储单元例如是任意形式的固定式或可移动式随机存取存储器(Random Access Memory,RAM)、只读存储器(Read-Only Memory,ROM)、快闪存储器(Flash memory)、硬盘或其他类似装置或这些装置的组合。
处理器120判断是否接收到操作指令,并且在判定接收到操作指令时,通过动态感测器110来判断动态目标物的位置。之后,处理器120基于动态目标物的位置来决定是否执行操作指令对应的操作。处理器120还可进一步通过动态感测器110检测驾驶的视线方向是否转向指定方向,并在检测到驾驶的视线方向转向指定方向时,通过动态感测器110判断指定区域是否被遮蔽。在判定指定区域被遮蔽时,处理器120发出警示信号。
图2是依照本发明一实施例的行车辅助方法的流程图。请同时参照图1及图2,在步骤S205中,处理器120判断是否接收到操作指令。在此,也可通过动态感测器110执行影像分析来判断是否接收到操作指令。利用动态感测器110获取影像,接着通过影像分析来判断中控台面板130或制动器(未示出)是否接收到操作指令。在未判定接收到操作指令的情况下,持续执行步骤S205。
在判定接收到操作指令时,在步骤S210中,通过动态感测器110来判断动态目标物的位置。并且,在步骤S215中,基于动态目标物的位置来决定是否执行操作指令对应的操作。在此,动态目标物例如为手。动态感测器110通过识别手在影像中的位置,进一步推断手在实际空间的位置,进而判断操作者为驾驶、副驾驶或后座乘客。
图3是依照本发明一实施例的行车辅助方法的流程图。本实施例为图2所示的实施例的一种应用例。请参照图1及图3,在步骤S305中,处理器120判断是否自中控台面板130接收到操作指令。例如,当中控台面板130的其中一按钮被按压时,处理器120判定中控台面板130接收到操作指令。在未判定接收到操作指令的情况下,持续执行步骤S305。
在判定自中控台面板130接收到操作指令的情况下,在步骤S310中,处理器120判断目前时速是否大于第一预设值。在此,第一预设值例如为5km/h,然并不以此为限。当目前时速未大于第一预设值时,如步骤S320所示,直接执行操作指令对应的操作。
当目前时速大于第一预设值时,在步骤S315中,通过动态感测器110来判断动态目标物。具体而言,通过动态感测器110来判断动态目标物的位置,并且,基于动态目标物的位置来判断动态目标物为驾驶、副驾驶或后座乘客。一般而言,使用者是通过手来对中控台面板130进行操作,故,动态感测器110可设定为识别手的来源方向以及执行操作的手为左手或右手来判断动态目标物。具体而言,影像识别单元111通过获取影像来分析及识别进行操作的是左手或右手以及来源方向(左手或右手是从哪个方向移动至中控台),判断单元113则依据来源方向与左右手来判断动态目标物是第一对象、第二对象或第三对象。在此,第一对象、第二对象、第三对象分别可对应为驾驶、副驾驶、后座乘客。底下列举一例来说明。
图4是依照本发明一实施例的操作中控台面板的示意图。在本实施例中,以左驾操作为例来进行说明。请参照图4,一般状况下,当副驾驶欲对中控台面板130进行操作时,其手U是从面向中控台面板130的右侧范围410进入。以此类推,驾驶在对中控台面板130进行操作时,手会从面向中控台面板130的左侧范围进入。而后座乘客在对中控台面板130进行操作时,手则会从中控台面板130的下方范围进入。据此,可整理出表1所示的关系(以左驾为例)。
在表1中示出了动态目标物的位置、左手/右手以及动态目标物三个参数之间的关系。在动态目标物的位置位于面向中控台面板130的左侧的情况下,不管检测到的是左手还是右手,皆判定动态目标物为驾驶。在动态目标物的位置位于面向中控台面板130的左侧的情况下,不管检测到的是左手还是右手,皆判定动态目标物为驾驶。在动态目标物的位置位于面向中控台面板130的右侧的情况下,不管检测到的是左手还是右手,皆判定动态目标物为副驾驶。
针对此特性,影像识别单元111可以设计成识别所获取影像中的手进入中控台面板130的来源方向。例如可从连续获取的多张影像来判断。
表1
返回图3,在判定目标动态物为副驾驶时,如步骤S320所示,直接执行操作指令对应的操作。在判定目标动态物并非为副驾驶时,如步骤S325所示,拒绝执行操作指令对应的操作。
通过上述实施例,在汽车行进中,倘若检测到中控台面板130接收到操作指令且目前时速大于第一预设值的情况下,会先通过动态感测器110判断目标动态物(操作者)是否为副驾驶,倘若不是副驾驶,则禁止进行操作,以避免驾驶分心来进行其他操作。据此,无需锁住中控台面板130的功能,也可确保驾驶的行车安全。
图5是依照本发明一实施例的行车辅助方法的流程图。本实施例为图2所示的实施例的一种应用例。请参照图1及图5,在步骤S505中,处理器120判断是否自制动器(手剎车、P档)接收到操作指令。在未判定接收到操作指令的情况下,持续执行步骤S505。
在判定自制动器接收到操作指令的情况下,在步骤S510中,判断目前时速是否小于第二预设值。在此,第二预设值例如为3km/h。当目前时速不小于第二预设值时,如步骤S525所示,拒绝执行操作指令对应的操作。
当目前时速小于第二预设值时,在步骤S515中,通过动态感测器110来判断动态目标物。具体而言,通过动态感测器110来判断动态目标物的位置,并且,基于动态目标物的位置来判断动态目标物为驾驶、副驾驶或后座乘客。
在判定动态目标物为驾驶时,如步骤S520所示,执行操作指令对应的操作。在判定动态目标物并非为驾驶时,如步骤S525所示,拒绝执行操作指令对应的操作。
通过上述实施例,在汽车行驶在一定时速(例如3km/h)以下接收到制动器的操作指令时,会先通过动态感测器110判断目标动态物(操作者)是否为驾驶,若是驾驶才允许进行操作,倘若并非为驾驶则禁止进行操作。据此,可避免驾驶以外的人误触制动器。本实施例中判断目标动态物(操作者)是否为驾驶的手法与图3所示的实施例相同。即,动态感测器110可设定为识别手的来源方向以及执行操作的手为左手或右手来判断动态目标物。
图6是依照本发明一实施例的行车辅助方法的流程图。请参照图1及图6,在步骤S605中,通过动态感测器110检测驾驶的视线方向是否转向指定方向,直到检测到驾驶的视线方向转向指定方向时,才继续执行步骤S610。例如,通过动态感测器110获取影像,并进一步分析影像中的驾驶的头部是否转动、或者驾驶的视线方向是否转向指定方向。
在步骤S610中,通过动态感测器110判断指定区域是否被遮蔽。例如,通过影像识别单元111来识别所获取的影像中的特定区域,并且通过判断单元113来判断特定区域是否被其他物件所遮蔽。在判定指定区域被遮蔽时,在步骤S615中,发出警示信号。以左驾而言,指定方向例如为驾驶的右侧方向,而指定区域则是指驾驶能够看到右方后照镜的区域。在驾驶视线方向转向指定方向的情况下,倘若副驾驶动作或者其他物品出现在指定区域中,由于会影响到驾驶的视角,因而被判定为指定区域被遮蔽,进而发出警示信号。
综上所述,本发明利用动态感测器来判断操作者为驾驶或副驾驶,并且还可进一步判断驾驶的视线及副驾驶的动作,借此来决定是否执行对应的操作,进而提高行车的安全性。
- 一种投影式车载导航通信行车辅助系统和行车辅助方法
- 一种行车辅助方法、装置、车载终端和计算机可读介质