车辆控制系统
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及一种车辆控制系统,其能够通过使用用户携带的终端来执行车辆的远程自主移动处理。
背景技术
已知的车辆控制系统通过在位于车辆外部的用户操作由其携带的操作终端时的远程操作执行远程自主泊车处理,以使车辆移动到泊车位置。操作终端将指示由用户输入的指令(例如,启动、继续或停止车辆行驶的指令)的信号发送到车辆中设置的控制装置。控制装置计算车辆到泊车位置的轨迹(行驶路线),并使车辆响应于从操作终端接收到的信号沿着该轨迹行驶。
在这样的远程自主泊车处理中,优选地,用户操作操作终端,从而确认用户本人是通过远程自主泊车实际控制车辆的操作的人。例如,日本未审专利申请特开(PCT申请译文)第2019-514088号公开了一种通过远程自主泊车持续车辆的操作的方法。在该方法中,用户应在操作终端的触摸面板上进行的手指的连续移动操作由点对点轨迹测试引导。该点对点轨迹测试在触摸面板上显示双直线箭头、两个点等。双直线箭头形成用于使用手指进行追踪的显示。两个点位于双直线箭头的两侧,以指示追踪的极限。用户将一只手的拇指放在触摸面板上的定位点处。同时,用户在双直线箭头上连续线性地移动另一只手的手指(即,用户重复往复操作),从而持续车辆的操作。
在以上文件中公开的远程自主泊车处理中,利用用户的往复操作来确定是持续还是停止远程自主泊车对车辆的操作。在持续远程自主泊车对车辆的操作时,车辆沿着轨迹以恒定速度移动,从而用户不能手动改变车辆速度(车辆的移动速度)。但是,在用户习惯于通过远程自主泊车操作车辆,并且在执行远程自主泊车的区域周围没有障碍物的情况下,用户可能会感到远程自主泊车中的车辆速度较低,因此希望提高车辆速度。另一方面,在执行远程自主泊车的区域周围存在障碍物的情况下,即使用户已经习惯了远程自主泊车对车辆的操作,用户也可能希望降低车辆速度。
发明内容
鉴于现有技术的这样的问题,本发明的一个主要目的是提供一种能够执行远程自主移动处理的车辆控制系统,其中,用户可以通过停止终端上的往复操作来停止车辆,并且可以改变车辆速度。
为了实现这样的目的,本发明的一个实施方式提供了一种车辆控制系统1,所述车辆控制系统包括:终端3,所述终端构造成由用户携带;以及控制装置15,所述控制装置构造成基于来自所述终端的输入来执行远程自主移动处理以将车辆从初始位置移动到规定的停止位置,并且将所述车辆停止在所述停止位置,其中,所述远程自主移动处理是在所述用户对所述终端持续进行往复操作的条件下进行的,并且具有多种模式,在所述多种模式中,移动所述车辆的车辆速度被设定为彼此不同的值,并且所述控制装置或所述终端构造成基于所述往复操作的速度来选择所述多种模式(ST27、ST28)中的一种模式(ST26)。
根据这种构造,用户需要持续在终端上进行往复操作,以便持续通过远程自主移动处理移动车辆,同时用户能够通过停止往复操作来停止车辆。另外,用户能够通过改变往复操作的速度来改变远程自主移动处理的模式,从而将车辆速度改变为针对相应模式设定的值。
优选地,所述远程自主移动处理具有低速模式和高速模式,在所述低速模式中,所述车辆速度被设定为第一速度,在所述高速模式中,所述车辆速度被设定为第二速度,所述第二速度高于所述第一速度,并且所述控制装置或所述终端构造成当所述往复操作的速度小于规定的阈值时(ST26:否)选择所述低速模式(ST28),并且当所述往复操作的速度等于或大于所述阈值时(ST26:是)选择所述高速模式(ST27)。
根据该构造,用户能够通过在终端上以低于阈值的速度进行往复操作来选择低速模式并且将车辆速度设定为第一速度。另一方面,当希望提高车辆速度时,用户能够通过以等于或大于阈值的速度在终端上进行往复操作来选择高速模式,并将车辆速度设定为第二速度。这样,车辆速度在第一速度和第二速度之间切换,因此,用户不必很在意操作速度来维持车辆速度,并且能够借助改变操作速度的简单操作来改变远程自主移动处理中的车辆速度。
优选地,所述终端包括:触摸面板30A,所述触摸面板构造成设定至少一个接受区域61以接受能被所述用户移动的操作部件62的所述往复操作;以及处理单元33,所述处理单元构造成执行所述触摸面板的显示处理和所述接受区域上的所述往复操作的接受处理,并使所述触摸面板显示所述多种模式中的所选择的模式。
根据该构造,用户能够在触摸面板上检查所选择的模式(更具体地说,根据用户自己借助操作部件(例如,用户的手指或手写笔)进行的往复操作的速度选择的模式),从而能够确保改变远程自主移动处理的车辆速度。
优选地,所述至少一个接受区域包括多个接受区域,并且所述处理单元构造成分别在所述触摸面板的左区域和右区域中设定所述接受区域,并基于所述操作部件对所述接受区域中的一个接受区域的输入执行所述接受处理。
根据该构造,用户能够通过将往复操作输入到能供用户容易地输入该往复操作的任一接受区域,从而进行远程自主移动处理。
优选地,所述往复操作的速度是由所述操作部件在所述接受区域上沿规定方向进行往复滑移操作的往复速度。
根据该构造,用户能够在不改变操作部件的实际移动速度的情况下,通过改变操作部件的往复滑移操作的往复节奏来改变车辆速度。因此,在选择并维持高速模式时,能够抑制用户的操作负担的增加。
优选地,所述终端构造成使所述触摸面板显示输入画面,用户在该输入画面上输入所述停止位置,并且所述终端构造成将关于所输入的停止位置的信息发送到所述控制装置。
根据该构造,用户能够通过使用终端来输入停止位置,从而用户能够在不进入车辆驾驶室的情况下指定停止位置。因此,例如,能够使停放在左右两侧没有开门空间的位置的车辆移动,从而能够提高用户的便利性。
优选地,所述控制装置构造成当从所述车辆到所述停止位置的距离等于或小于规定距离时(ST29:是)禁止所述高速模式(ST14)。
根据该构造,当从车辆到停止位置的距离等于或小于规定距离时,车辆速度变为第一速度。因此,当希望车辆停止在停止位置或停止位置附近时,用户能够将车辆停止在更准确的位置。
优选地,所述控制装置构造成对所述终端进行认证,基于来自所述认证的终端的输入对所述远程自主移动处理的次数进行计数,并且当所述次数等于或小于规定次数时(ST11:是)禁止所述高速模式(ST12)。
根据该构造,当不习惯远程自主移动处理的用户进行该处理时,车辆速度始终被设定为第一速度。因此,能够抑制远程自主移动处理期间车辆间的接触及操作错误。
因此,根据以上构造,能够提供一种能够执行远程自主移动处理的车辆控制系统,其中用户能够通过停止在终端上的往复操作来停止车辆,并且能够改变车辆速度。
附图说明
图1是根据一个实施方式的车辆控制系统的功能框图;
图2A是示意性平面图,其示出了在根据该实施方式的车辆控制系统中,车辆中设置的声纳及其检测区域;
图2B是示意性平面图,其示出了在根据该实施方式的车辆控制系统中,车辆中设置的后视镜摄像头及其图像采集区域;
图3是根据该实施方式的车辆控制系统中的泊车辅助处理的顺序图;
图4A和图4B是分别示出根据该实施方式的车辆控制系统中的操作终端的画面显示的说明图。
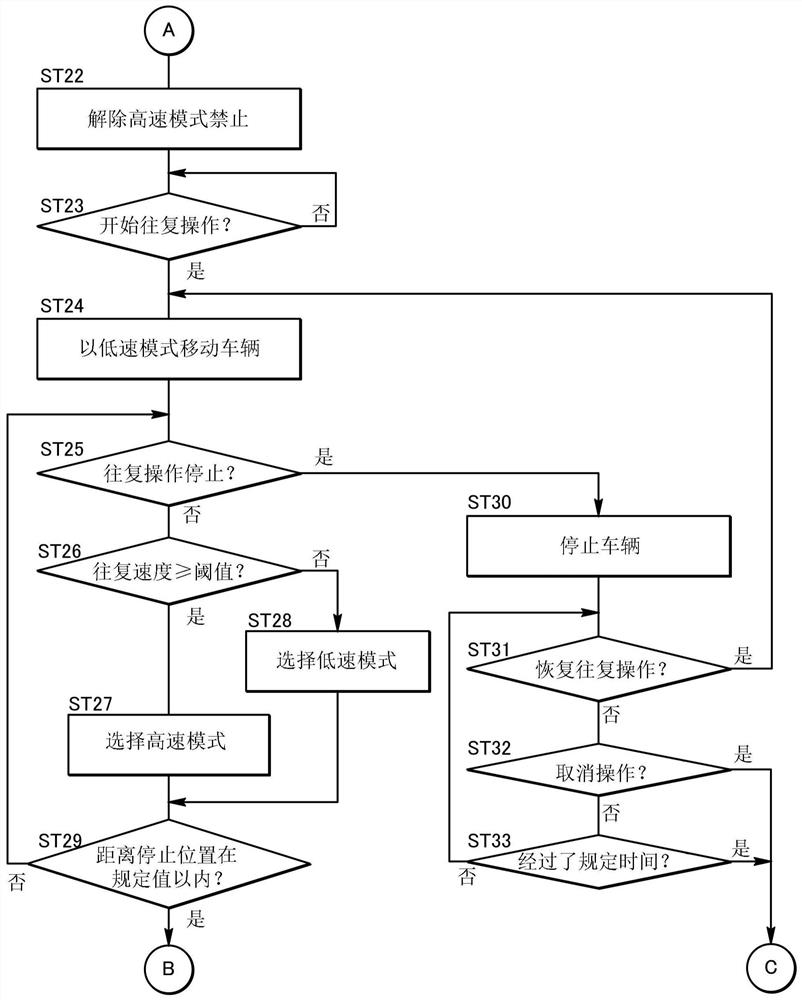
图5是示出根据该实施方式的车辆控制系统中的远程自主泊车处理的流程图;以及。
图6是示出根据该实施方式的车辆控制系统中的远程自主泊车处理的流程图。
具体实施方式
如图1中所示,车辆控制系统1包括车辆系统2和至少一个操作终端3。车辆系统2包括传动系4、制动装置5、转向装置6、外部环境传感器7、车辆传感器8、通信装置9、导航装置10、驾驶操作装置11、驾驶员检测传感器12、HMI 13、智能钥匙14和控制装置15。车辆系统2的以上部件借助诸如控制器局域网16(CAN)之类的通信装置彼此连接,从而能够在以上部件之间传输信号。车辆系统2的以上部件除了智能钥匙14之外均安装至车辆V。
传动系4是向车辆V施加驱动力的装置。例如,传动系4包括动力源和变速器。动力源包括诸如汽油发动机和柴油发动机之类的内燃发动机与电动马达中的至少一者。制动装置5是向车辆V施加制动力的装置。例如,制动装置5包括:制动钳,其将制动块压靠在制动转子上;以及电动缸,其将油压供应至制动钳。制动装置5包括泊车制动装置,该泊车制动装置经由线缆限制车轮的旋转。转向装置6是用于改变车轮的转向角的装置。例如,转向装置6包括:齿条-小齿轮机构,其使车轮转向(转动);和电动马达,其驱动该齿条-小齿轮机构。传动系4、制动装置5和转向装置6由控制装置15控制。
外部环境传感器7是从车辆V的周边检测电磁波、声波等以检测车辆V外部的物体的传感器。外部环境传感器7包括声纳17和外部摄像头18。外部环境传感器7还可以包括毫米波雷达或激光雷达。外部环境传感器7将检测结果输出至控制装置15。
每个声纳17均由所谓的超声波传感器构成。每个声纳17均在车辆V周围发射超声波并捕获由物体反射的超声波以检测物体的位置(距离和方向)。如图2A中所示,多个声纳17分别设置在车辆V的后部和前部。在本实施方式中,两对声纳17设置在后保险杠的左侧和右侧,两对声纳17设置在前保险杠的左侧和右侧,并且车辆V的左面和右面中每一者的前端和后端设置有一对声纳17。即,车辆V总共设置有六对声纳。在图2A中,声纳17的检测区域被着色。设置在后保险杠上的声纳17主要检测车辆V后方的物体的位置。设置在前保险杠上的声纳17主要检测车辆V前方的物体的位置。设置在车辆V的左面和右面的前端的声纳17分别检测车辆V的前端的左右外侧上的物体的位置。设置在车辆V的左面和右面的后端的声纳17分别检测车辆V的后端的左右外侧上的物体的位置。
外部摄像头18是采集车辆V周围的图像的装置。每个外部摄像头18均由使用诸如CCD或CMOS之类的固体成像元件的数字摄像头构成。外部摄像头18包括:前摄像头,其采集车辆V前部的图像;和后摄像头,其采集车辆V后部的图像。如图2B中所示,外部摄像头18包括左右一对后视镜摄像头,其设置在车辆V的后视镜附近,以采集车辆V的左侧和右侧后方的图像。在图2B中,后视镜摄像头的图像采集区域(检测区域)被画上了阴影线。外部摄像头18可以包括设置在车辆V的中柱(B柱)上的左右一对柱摄像头,以采集车辆V的左右外侧的图像。
车辆传感器8包括:车速传感器,其检测车辆V的速度;加速度传感器,其检测车辆V的加速度;横摆率传感器,其检测绕车辆V的竖向轴线的角速度;以及方向传感器,其检测车辆V的方向。例如,横摆率传感器由陀螺仪传感器构成。
通信装置9在控制装置15与操作终端3之间传递(中继)无线通信。由此,控制装置15能够经由通信装置9与用户携带的操作终端3进行通信。通信装置9可以利用诸如红外通信或蓝牙(注册商标)之类的已知通信方法。
导航装置10是获取车辆V的当前位置并且提供到目的地等的路线指引的装置。导航装置10包括GPS接收单元20和地图存储单元21。GPS接收单元20基于从人造卫星(定位卫星)接收的信号来辨识车辆V的位置(纬度和经度)。地图存储单元21由诸如闪存或硬盘之类的已知存储设备构成,并存储地图信息。
驾驶操作装置11设置在车辆V的车厢内,并且接受驾驶员(用户)的输入操作(驾驶操作)来控制车辆V。驾驶操作装置11包括油门踏板、制动踏板、方向盘、变速杆和按动启动开关(发动机启动按钮)。按动启动开关接受驾驶员的车辆V的启动操作(车辆V的启动操作的输入操作)。驾驶操作装置11可以进一步包括用于激活泊车制动装置的元件。驾驶操作装置11包括检测输入操作的操作量的传感器,并且将指示输入操作的操作量的信号输出至控制装置15。
驾驶员检测传感器12是用于检测驾驶员(用户)坐在驾驶员座椅上的传感器。例如,驾驶员检测传感器12由设置在驾驶员座椅的座椅表面上的座椅传感器构成。座椅传感器可以由用于检测电容变化的电容式传感器构成,或者可以由驾驶员坐在驾驶员座椅上时会开启的膜片式开关构成。另选地,驾驶员检测传感器12可以由室内摄像头构成,该室内摄像头采集坐在驾驶员座椅上的驾驶员的图像。另选地,驾驶员检测传感器12可以由安全带传感器构成,以基于关于安全带的舌是否插入其带扣中的信息来检测驾驶员是否系紧了驾驶员座椅的安全带。驾驶员检测传感器12将检测结果输出至控制装置15。
HMI 13通过显示器或语音通知用户各种信息,并接受用户的输入操作。例如,HMI13包括:触摸面板23,其接受用户的输入操作;以及诸如蜂鸣器和扬声器之类的声音产生装置24。触摸面板23包括液晶显示器、有机EL显示器等。
控制装置15由电子控制装置(ECU)构成,ECU包括CPU、诸如ROM之类的非易失性存储器、诸如RAM之类的易失性存储器等。CPU根据程序执行操作处理,使得控制装置15执行各种类型的车辆控制。控制装置15可以由一个硬件组成,或者可以由包括多个硬件的单元组成。此外,控制装置15的功能可以至少部分地由诸如LSI、ASIC和FPGA之类的硬件执行,或者可以由软件和硬件的组合来执行。
智能钥匙14(FOB钥匙)是能够由用户携带的已知的无线终端。智能钥匙14能够经由通信装置9从车辆V的外部与控制装置15进行通信。智能钥匙14包括按钮以接受用户的输入。用户能够通过操作智能钥匙14的按钮来释放门锁并启动车辆V的运转。
操作终端3均由用户能够携带的无线终端构成,并且可以经由通信装置9从车辆V外部与控制装置15通信。在本实施方式中,操作终端3均由智能手机构成。预先在操作终端3上安装规定的应用程序,以便操作终端3均能够与控制装置15通信。操作终端3均设置有终端ID,该终端ID是用于辨识操作终端3的规定数值。
如图1中所示,操作终端3均包括输入/输出单元30、操作者监测单元31、位置检测单元32和处理单元33。
输入/输出单元30向用户提供操作操作终端3的信息,并接受操作操作终端3的用户的输入。输入/输出单元30例如由触摸面板30A(参见图4A和图4B)构成。当输入/输出单元30接受用户的输入时,输入/输出单元30将与输入相对应的信号输出至处理单元33。
操作者监测单元31是采集操作操作终端3的用户的图像的单元。例如,操作者监测单元31由使用诸如CMOS之类的固体成像元件的数字摄像头构成。操作者监测单元31设置在一位置处,以采集包括对输入/输出单元30执行输入的用户的眼睛在内的面部图像。
位置检测单元32获取操作终端3的位置信息。位置检测单元32可以例如通过从测地卫星(GPS卫星)接收信号来获取操作终端3的位置信息。另选地,位置检测单元32可以通过经由通信装置9与控制装置15进行通信来获取关于操作终端3相对于车辆V的位置的信息。位置检测单元32将获取的操作终端3的位置信息输出至处理单元33。
处理单元33将来自输入/输出单元30的信号、由操作者监测单元31采集的用户图像以及由位置检测单元32获取的操作终端3的位置信息发送给控制装置15。此外,当处理单元33从控制装置15接收信号时,处理单元33处理来自控制装置15的信号,并使输入/输出单元30向操作操作终端3的用户提供信息。输入/输出单元30可以例如通过在其上显示信息而向用户提供信息。
控制装置15能够基于来自操作终端3的信号来启动车辆V的运转(即,传动系4的驱动)。此外,控制装置15能够基于来自操作终端3的信号执行远程泊车以将车辆V移动到规定位置并将车辆V停放在那。此时,为了控制车辆V,控制装置15至少包括启动单元40、外部环境识别单元41、车辆位置辨识单元42、行动计划单元43、行驶控制单元44和存储单元45。
启动单元40基于来自包括在驾驶操作装置11中的按动启动开关的信号来执行智能钥匙14的认证。此外,启动单元40确定智能钥匙14是否位于车辆V中。在智能钥匙14的认证成功并且启动单元40确定智能钥匙14位于车辆V内部的情况下,启动单元40启动传动系4的驱动(即,启动单元40启动车辆V的运转)。此外,在控制装置15从操作终端3接收到指示启动车辆V的运转的信号的情况下,启动单元40执行操作终端3的认证。在操作终端3的认证成功的情况下,启动单元40启动传动系4的驱动(即,启动单元40启动车辆V的运转)。在传动系4包括内燃发动机的情况下,当启动单元40启动传动系4的驱动时,启动单元40开启点火装置。
外部环境识别单元41基于外部环境传感器7的检测结果,识别位于车辆V周围的障碍物(例如,停放的车辆或墙壁),从而获取关于障碍物的信息。此外,外部环境识别单元41基于诸如图案匹配之类的已知图像分析方法来分析由外部摄像头18采集的图像,从而确定是否存在障碍物并且在存在障碍物的情况下获取障碍物的尺寸。此外,外部环境识别单元41可以基于来自声纳17的信号来计算距障碍物的距离,以获取障碍物的位置。
车辆位置辨识单元42基于来自导航装置10的GPS接收单元20的信号来辨识车辆V的位置。此外,除了来自GPS接收单元20的信号之外,车辆位置辨识单元42还可以从车辆传感器8获取车辆V的车速和横摆率,以借助所谓的惯性导航来辨识车辆V的位置和姿势。
外部环境识别单元41基于诸如图案匹配之类的已知图像分析方法来分析外部环境传感器7的检测结果(更具体地,由外部摄像头18采集的图像),从而识别例如泊车区的路面上的白线位置。
行驶控制单元44基于来自行动计划单元43的行驶控制指令控制传动系4、制动装置5和转向装置6,以使车辆V行驶。
存储单元45由RAM等构成,并且存储执行行动计划单元43和行驶控制单元44的处理所需的信息。
当HMI 13或操作终端3接受用户的输入时,行动计划单元43计算车辆V的轨迹(行驶路线),并且如有必要,将行驶控制指令输出至行驶控制单元44。
在车辆V已经停止之后,当用户经由远程操作执行与期望泊车辅助相对应的输入时,行动计划单元43执行泊车辅助处理。下文中,将参考图3的时序图描述泊车辅助处理。
首先,行动计划单元43执行获取处理以获取停放车辆V的至少一个空间(以下称为“可用泊车位置”)。具体地,行动计划单元43使HMI 13的触摸面板23显示指示驾驶员驾驶车辆V直行的通知。在驾驶员驾驶车辆V直行时,行动计划单元43基于来自外部环境传感器7的信号,获取障碍物的位置和尺寸以及路面上的白线位置。行动计划单元43基于障碍物的位置和尺寸以及白线位置,提取至少一个可用泊车位置。
接下来,行动计划单元43执行泊车位置接受处理,以接受从所述至少一个可用泊车位置中选择的要停放车辆V的位置(以下称为“泊车位置”)。更具体地,在行动计划单元43在上述获取处理中提取所述至少一个可用泊车位置的情况下,行动计划单元43使触摸面板23显示指示用户停止车辆V的通知。此时,行动计划单元43可以在车辆V停止之后使触摸面板23也显示指示用户将变速杆的位置改变为泊车位置的通知。
接下来,行动计划单元43使触摸面板23显示车辆V的当前位置和所述至少一个可用泊车位置。此时,行动计划单元43可以使触摸面板23在由外部摄像头18获取的图像上显示车辆V的当前位置和所述至少一个可用泊车位置。此后,行动计划单元43使触摸面板23显示指示用户从所述至少一个可用泊车位置中选择泊车位置的通知。当用户将期望的泊车位置输入至触摸面板23时,触摸面板23将与输入的泊车位置相对应的信号输出至行动计划单元43。此时,行动计划单元43可以基于用户触摸该触摸面板23的位置辨识期望的泊车位置。此时,行动计划单元43使触摸面板23显示使用户选择泊车方向(前进泊车方向或后退泊车方向)的按钮。此时,行动计划单元43可以简单地计算从车辆V的当前位置到泊车位置的一对路线,使得每条路线对应于前进泊车方向或后退泊车方向,并且可以使触摸面板23显示这一对路线。在这种情况下,触摸面板23可以允许用户通过触摸这一对路线中的一条路线来选择泊车方向,并且可以将选择结果(即,所选择的泊车方向)输出至行动计划单元43。
接下来,当行动计划单元43从触摸面板23接收到用户输入的泊车位置时,行动计划单元43执行轨迹计算处理以计算车辆V从当前位置到泊车位置的轨迹。在该处理中,在用户进行输入以选择泊车方向的情况下,行动计划单元43不仅可以基于当前位置和泊车位置,还可以基于用户选择的泊车方向来计算车辆V的轨迹。
当完成车辆V的轨迹的计算时,行动计划单元43使触摸面板23显示督促用户从车辆V下来的通知和指示用户启动操作终端3中的远程泊车处理的专用应用软件(以下称为“远程泊车应用”)的通知。根据这些通知,用户从车辆V下来,然后启动操作终端3中的远程泊车应用。
此后,操作终端3的输入/输出单元30显示输入按钮,以将操作终端3连接至车辆V并启动对操作终端3的认证。当用户操作(例如,触摸或按动)输入按钮时,操作终端3均连接至车辆V,并且行动计划单元43执行终端认证处理以执行对连接至车辆V的操作终端3的认证。在终端认证处理中,操作终端3均向行动计划单元43发送包括操作终端3的终端ID的认证请求信号。行动计划单元43基于操作终端3的终端ID执行操作终端3的认证(确定)。当行动计划单元43成功认证操作终端3时,行动计划单元43向操作终端3发送信号以通知认证成功,然后操作终端3的输入/输出单元30显示车辆V的当前位置、轨迹和泊车位置以及竖向箭头。因此,用户能够通过向操作终端3的输入/输出单元30执行输入来指示行动计划单元43执行远程自主泊车处理(远程泊车处理)。远程自主泊车处理包括:移动处理,其用于将车辆V从当前位置移动至泊车位置;和泊车处理,其用于将车辆V停放在泊车位置。此外,行动计划单元43基于来自经认证的操作终端3的输入来计数远程自主移动处理(例如,远程自主泊车处理)的次数,并将计数的次数存储在存储单元45中。
当用户在操作终端3的输入/输出单元30上显示的其中一个接收区域61(参见图4A和图4B)上重复输入规定的操作(例如,滑动操作)时,操作终端3将操作速度信号发送至行动计划单元43。操作速度信号对应于重复操作(往复操作)的输入及其操作速度。行动计划单元43将操作速度信号转换为车辆V的移动速度(即,车辆速度),从而执行移动处理,以使车辆V以计算出的移动速度沿着轨迹移动到泊车位置。
在该移动处理期间,行动计划单元43确定车辆V是否已经到达泊车位置。当行动计划单元43确定车辆V已经到达泊车位置时,行动计划单元43执行泊车处理以停放车辆V。在该泊车过程中,行动计划单元43首先向行驶控制单元44的车辆发送停止控制指令以激活制动装置5。此后,行动计划单元43激活泊车制动装置5。当完成泊车处理时,行动计划单元43将表明已经完成泊车处理的泊车完成通知发送至操作终端3。
当操作终端3均接收到泊车完成通知时,操作终端3的输入/输出单元30显示表明车辆V的泊车已经完成的通知,并且操作终端3结束远程泊车应用。由此,完成远程自主泊车处理。
以下,参考图1以及图4A至图6描述以上远程自主泊车处理中的以下事项1至2:
1.用户对操作终端3的具体操作;
2.接收到与来自操作终端3的具体操作对应的信号的控制装置15进行的车辆V的控制以及对操作终端3的响应。
顺便提及,本实施例不仅可以广泛地应用于远程泊车处理,而且可以广泛地应用于车辆V在用户能够监测的范围内从任意初始位置到任意停止位置的移动处理(例如,将停放的车辆V移动到用户将乘上车辆V的位置的移动处理)。即,以上描述中的“当前位置”、“泊车位置”、“泊车处理”和“远程自主泊车处理”可以分别改述为“初始位置”、“停止位置”、“停止处理”和“远程自主移动处理”。
不仅可以从HMI 13的触摸面板23输入停止位置,还可以从操作终端3的触摸面板30A(输入/输出单元30)输入该停止位置。处理单元33使输入/输出单元30显示供用户输入停止位置的画面,并且将关于用户输入的停止位置的信息发送至控制装置15。例如,可能存在这样的情况,即,用户想要移动停放在没有空间开闭左右门的位置的车辆V。在这种情况下,用户可以输入以下位置1至3之一作为停止位置:
1.车辆V向前或向后移动大约车辆长度的位置;
2.用户从车辆V下车以停放车辆的位置;
3.车辆V向前或向后移动,使得控制装置15可以基于由外部环境传感器7获取的信息确定门可以开闭的位置。
以这种方式,用户可以在不进入车辆V的情况下识别停止位置,从而车辆控制系统1对于用户来说能够更加方便。
在远程自主移动处理中,用户从车辆V外部对操作终端3的触摸面板30A进行操作,从而使处于停止状态的车辆V开始移动。如图4A和图4B中所示,触摸面板30A显示接受区域61,以接受用户的操作。接受区域61各自具有在竖直方向上拉长的椭圆形形状。接受区域61成对地显示在触摸面板30A的下部的左右两侧。每个接受区域61均构造成接受由可以根据用户自己的意志移动的操作部件62(例如,用户的手指或手写笔)进行的滑移操作。在每个接受区域61的纵向方向上的一端(图4A和图4B的实施例中的上端)附近显示圆形图标63。用户用操作部件62接触图标63,然后在触摸面板30A上滑移操作部件62(即,用户在触摸面板30A上滑动操作部件62),从而移动图标63。
图4A示出了用户尚未在图标63上滑动操作部件62的状态下(即,在车辆V停止的状态下)的触摸面板30A。图4B示出了用户用操作部件62触碰图标63并滑动操作部件62的状态下(即,在车辆V移动的状态下)的触摸面板30A。如图4B中所示,右侧的接受区域61倾斜,使得其上部从其下部朝左侧(朝触摸面板30A的中心)偏移,从而用户在用左手握住操作终端3时,能够容易用左手的拇指输入往复操作。左侧的接受区域61倾斜,使得其上部从其下部朝右侧(朝触摸面板30A的中心)偏移,从而用户在用右手握住操作终端3时,能够容易用右手的拇指输入往复操作。
在触摸面板30A的上部的左侧,显示车辆V、车辆V的状态(在本实施方式中,变速器的换档范围(P:泊车范围、D:驱动范围、R:倒车范围等))以及指示车辆V的移动方向的箭头。在车辆V停止时,指示车辆V的移动方向的箭头被不显眼地显示,并且在车辆V移动时被显眼地显示。在车辆V的一侧显示“检查您的周围环境。”的说明以引起用户的注意,在车辆V的前方(画面的上端)显示“移开或停下您的手指以停止车辆。”的说明。
如图4A中所示,在进行滑动操作之前,在触摸面板30A的下端,显示“持续在任一图标上滑动您的手指以移动车辆”的说明(操作画面的说明)。当操作部件62在任一接受区域61中显示的图标63上沿竖直方向滑动时,操作终端3的处理单元33将该滑动操作接受为往复操作的输入。这样,处理单元33分别在触摸面板30A的左右区域设定接受区域61。因此,用户通过将往复操作输入到容易供用户输入往复操作的任一个接受区域61,可以进行远程自主移动处理并且如后所述移动车辆V。
在触摸面板30A的上部的右侧,显示有取消按钮64和模式显示部65。取消按钮64构造成接受用户对远程自主移动处理的取消操作。模式显示部65构造成显示多个模式(高速模式和低速模式),在这些模式中,远程自主移动处理中的车辆速度被设定为彼此不同的值。
在低速模式中,远程自主移动处理中的车辆V的移动速度(车辆速度)被设定为第一速度(例如,2km/h)。在高速模式中,远程自主移动处理中的车辆V的移动速度(车辆速度)被设定为第二速度(例如,4km/h)。第一速度和第二速度可以设定成关于车辆V的前进和后退移动为相同值或不同值。就车辆V的前进移动和后退移动中的至少一者而言,高速模式中设定的第二速度高于低速模式中设定的第一速度;并且就车辆V的前进移动和后退移动中的两者而言高速模式中设定的第二速度等于或大于低速模式中设定的第一速度。默认情况下,禁止使用高速模式并仅可选择低速模式。
另一方面,如图4B中所示,在滑动操作期间,在触摸面板30A的下端,显示示出远程自主移动处理的进度和距离泊车完成剩余时间的条形图。如图4B中所示,在滑动操作期间,触摸面板30A上不显示取消按钮64,并且在触摸面板30A的上部右侧仅显示模式显示部65。模式显示部65构造成显示选择模式(“低速”或“高速”)或可选择模式(“低速”或“低速/高速”)。
在启动远程自主移动处理(远程自主泊车处理)时,控制装置15根据图5和图6中所示的程序执行各种处理。首先,行动计划单元43确定在终端认证处理中认证的操作终端3的远程自主移动处理的次数是否在10次(ST11)以内。在该操作终端3的远程自主移动处理的次数在10次以内的情况下(ST11:是),行动计划单元43维持默认设定的高速模式禁止(ST12)。在这种情况下,操作终端3的模式显示部65(参见图4A和图4B)显示“低速”为可选择模式。
随后,行动计划单元43确定是否开始用户对操作终端3的任一接受区域61进行的往复操作(ST13)。在未开始往复操作的情况下(ST13:否),行动计划单元43重复ST13的处理。在开始往复操作从而ST13中的确定变为“是”的情况下,行动计划单元43开始以低速模式沿轨迹移动车辆V的处理(ST14)。准确地说,行动计划单元43向行驶控制单元44输出以低速模式中设定的第一速度(例如,2km/h)移动车辆V的指令。在下文中,“行动计划单元43向行驶控制单元44输出移动(或停止)车辆V的指令”的表述将被替换为“行动计划单元43移动(或停止)车辆V”的表述。
除非用户停止往复操作(ST15:是)或车辆V到达停止位置(ST16:是),否则,车辆V持续移动。即,在用户在操作终端3上重复(持续)往复操作的条件下,远程自主移动处理持续进行。在车辆V移动的同时,操作终端3的触摸面板30A显示图4B中所示的画面。因此,显眼地显示指示车辆V的移动方向的箭头,并且模式显示部65显示“低速”作为选择模式。
当车辆V在移动中到达停止位置(ST16:是),而用户的往复操作持续进行(ST15:否)时,行动计划单元43使车辆V停止在停止位置(ST17),并结束该处理。另一方面,当在车辆V到达停止位置(ST16:否)之前用户停止往复操作(ST15:是)时,行动计划单元43使车辆V停止在轨迹上的停止位置之前的位置(ST18)。
随后,行动计划单元43确定是否恢复用户对操作终端3的任一接受区域61的往复操作(ST19)。在不恢复用户的往复操作(ST19:否)并且在取消按钮64上输入取消操作(ST20:是)的情况下,或者在经过了规定时间(ST21:是)的情况下,行动计划单元43结束该处理。当经过规定时间之前(ST21:否)恢复用户的往复操作(ST19:是)时,行动计划单元43将该处理返回到ST14,并开始以低速模式移动车辆V。
另一方面,在终端认证处理中被认证的操作终端3的远程自主移动处理的次数超过10次(ST11:否)的情况下,行动计划单元43进行至图6中的ST22,并解除默认设定的高速模式禁止。当行动计划单元43解除高速模式禁止时,操作终端3的模式显示部65(参见图4A和4B)显示“低速/高速”作为可选择模式。
随后,行动计划单元43确定用户对操作终端3的任一接受区域61进行的往复操作是否开始(ST23)。在未开始往复操作的情况下(ST23:否),行动计划单元43重复ST23的处理。在开始往复操作并因此ST23中的确定变为“是”的情况下,行动计划单元43开始以低速模式移动车辆V(ST24)。
当车辆V移动时,行动计划单元43确定操作部件62对操作终端3的任一接受区域61的往复操作的速度是否等于或大于规定的阈值(ST26)。这里,“往复操作的速度”并不是指操作部件62在触摸面板30A上的移动速度,而是指在触摸面板30A的任一接受区域61(参见图4A和图4B)上的竖直方向上的往复滑移操作的重复速度(往复速度)。例如,往复操作的速度为往复操作一个回合(一次上下移动)所需时间的倒数,该往复操作以在向上方向(去程)和向下方向(回程)上的规定滑移距离重复输入至任一接受区域61。例如,阈值设定为1次/秒或0.9次/秒。另选地,也可以为阈值设定滞后,以防止频繁切换模式,因此,低速模式中使用的阈值可以设定为大于高速模式中使用的阈值的值。
在往复操作的速度(往复速度)等于或超过阈值(ST26:是)的情况下,行动计划单元43选择高速模式(ST27)。因此,将车辆V的移动速度设定为第二速度(例如,4km/h)。另一方面,在往复操作的速度(往复速度)低于阈值(ST26:否)的情况下,行动计划单元43选择低速模式(ST28)。因此,将车辆V的移动速度设定为第一速度(例如,2km/h)。
这样,用户可以选择低速模式,并且通过以低于阈值的速度在操作终端3上进行往复操作,将车辆速度设定为第一速度。另一方面,当希望提高车辆速度时,用户可以选择高速模式并通过以等于或大于阈值的速度在操作终端3上进行往复操作,将车辆速度设定为第二速度。这样,车辆速度在第一速度和第二速度之间切换。因此,用户不必很在意操作速度来维持车辆速度,并且通过改变操作速度的简单操作,就可以在远程自主移动处理中改变车辆速度。
除非用户停止往复操作(ST25:是)或者车辆V到达距离停止位置在规定值(例如50cm)以内的位置(ST29:是),否则车辆V继续以低速模式或高速模式移动。在车辆V移动的同时,操作终端3的触摸面板30A显示图4B中所示的画面,在该画面中,显眼地显示指示车辆V的移动方向的箭头,并且模式显示部65显示“低速”或“高速”作为选择模式。这样,操作终端3的处理单元33执行显示处理以在触摸面板30A上显示所选模式。因此,用户可以在触摸面板30A上检查所选择的模式(更具体地说,根据用户自己通过利用操作部件62进行的往复操作的速度所选择的模式),从而确保将远程自主移动处理的车辆速度改变为所需模式的车辆速度。
这样,ST26中确定的往复操作的速度是由操作部件62在任一接受区域61上在规定方向上的往复滑移操作的往复速度。因此,用户可以通过改变操作部件62的往复滑移操作的往复节奏来改变车辆速度,而不改变操作部件62的实际移动速度。因此,在选择并维持高速模式时,能够抑制用户的操作负担的增加。
当用户的往复操作在车辆V到达距离停止位置在规定值以内的位置之前(ST29:否)停止(ST25:是)时,行动计划单元43使车辆V停止在轨迹上的与停止位置相隔所述规定值以上的位置(ST30)。
随后,行动计划单元43确定是否恢复用户对操作终端3的任一接受区域61的往复操作(ST31)。在不恢复用户的往复操作(ST31:否)并且在取消按钮64上输入取消操作(ST32:是)的情况下,或者在经过了规定时间(ST33:是)的情况下,行动计划单元43将处理推进到“C”,并结束该处理(如图5中所示)。当在经过规定时间之前(ST33:否)恢复用户的往复操作(ST31:是)时,行动计划单元43将处理返回到ST24,并开始以低速模式移动车辆V。
当车辆V在移动的同时到达距离停止位置在规定值以内的位置(ST29:是)并且用户的往复操作持续进行(ST25:否)时,行动计划单元43将处理推进到“B”并使车辆V以图5中所示的低速模式移动(ST14)。即,在往复操作的速度等于或大于阈值(ST26:是)的情况下,行动计划单元43禁止选择高速模式(ST27)。
这样,当车辆V到停止位置的距离变得等于或小于规定距离(ST29:是)时,行动计划单元43禁止高速模式,并使车辆V以低速模式移动(ST14)。因此,当希望将车辆V停止在停止位置处或附近时,用户可以将车辆V停在更准确的位置。特别是,在车辆V是可以使用非接触方式充电的电动车辆并且车辆V的停止位置是配备有非接触式充电板的泊车位的情况下,用户通过以低速模式移动车辆V,可以容易地对车辆V的停止位置进行微调。
另外,在认证的操作终端3的远程自主移动处理的次数等于或少于规定次数(ST11:是)的情况下,行动计划单元43在ST12中禁止高速模式,不将处理推进到ST22至ST29并且在ST13至ST17中执行处理。因此,当不习惯远程自主移动处理的用户进行该处理时,车辆速度总是被设定为第一速度(例如,2km/h)。因此,能够抑制远程自主移动处理期间车辆间的接触及操作错误。
这样,控制装置15的行动计划单元43基于往复操作的速度(ST26)选择多个模式(ST27、ST28)中的一者,从而基于往复操作的速度改变远程自主移动处理中的车辆速度。因此,用户需要在操作终端3上继续进行往复操作,以便通过远程自主移动处理持续移动车辆V,同时用户可以通过停止往复操作(ST15:是;ST25:是)来停止车辆V(ST18、ST30)。此外,用户可以通过改变往复操作的速度来改变远程自主移动处理的模式(ST26至ST28),从而将车辆速度改变为针对相应模式设定的值。
在前文中已经描述了本发明的具体实施方式,但本发明不应受前述实施方式的限制,并且在本发明的范围内可以进行各种变型和变更。例如,在以上实施方式中,控制装置15的行动计划单元43基于从操作终端3发送的操作速度信号,选择多种模式中的一种。另一方面,操作终端3可以基于重复操作(往复操作)的速度选择模式,并且可以将包括重复操作(往复操作)和选择模式的输入的操作信号传送给行动计划单元43。另外,在以上实施方式中,控制装置15的行动计划单元43对操作终端3进行认证,并基于来自认证的操作终端3的输入,对远程自主移动处理的次数进行计数。另一方面,行动计划单元43可以对操作终端3和操作操作终端3的操作者进行认证,并基于来自认证的操作者和认证的操作终端3的输入对远程自主移动处理的次数进行计数。此外,以上实施方式中所示的各构件及其各部分的具体构造和位置、数量、程序等都可以在本发明的范围内适当改变。另外,以上实施方式中所示的结构要素不一定都是不可缺少的,可以根据情况有选择地采用它们。
- 车辆控制系统验证装置、车辆控制系统以及车辆控制系统验证方法
- 车辆用控制装置、车辆用控制系统、车辆用控制方法及车辆用控制系统的控制方法