一种防止汽车前后滑行的装置及其方法
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及行车安全交通技术领域,特别涉及一种防止汽车前后滑行的装置及其方法。
背景技术
驾驶员在驾驶过程中会遇到等红绿灯、接打电话等情况,或是汽车处于熄火状态时,由于一些驾驶员操作的原因会造成汽车向前后方滑行,造成不安全事故的发生。
发明内容
为了克服上述现有技术的不足,本发明的目的在于提供一种防止汽车前后滑行的装置及其方法,在检测到汽车向前后方滑行时,通过语音播报提醒,如果驾驶员没有采取行动,则装置会自动刹车,能够有效防止汽车向前后方滑行造成的事故,具有安装方便,结构简单,实施效果好的特点。
为了实现上述目的,本发明采用的技术方案是:
一种防止汽车前后滑行的装置,包括微处理器3,所述微处理器3的输入端连接汽车蓄电池1、继电器触点2、前进速度传感器6、倒退速度传感器7、空档位置传感器8,所述微处理器3输出端连接语音模块4和制动控制器5;
所述前进速度传感器6、倒退速度传感器7用于检测汽车轴承15的转动情况,将检测到的信号信息反馈给微处理器3。
所述汽车蓄电池1采用JX27为装置供电。
所述语音模块4包含两个喇叭,通过微处理器3进行控制,一个装在汽车后备箱上方,另一个装在仪表盘上方,所述微处理器3控制制动控制器5进行自动刹车。
所述制动控制器5采用盘式制动器6x001260。
所述继电器触点2位于装置继电器J2上,所述继电器J2通有12V电压,继电器J2与汽车自带的继电器J1的常开触点相连接,所述继电器J2与所述微处理器3的I/O口进行连接。
所述汽车轴承15上对称设置有千斤17,每一侧的千斤17与齿轮16和弹簧片18配合,所述千斤17上分别设置有前进速度传感器6和倒退速度传感器7。
所述空档位置传感器8包括在档杆21空挡挡位两侧分别设置的光源19和光接收器20,所述光源19和光接收器20在同一水平线上,所述光接收器20将接收到的信号传递给微处理器3。
一种防止汽车前后滑行的装置的使用方法,包括以下步骤;
装置安装完成后,当汽车滑行时汽车轴承15转动,此时有脉冲信号产生,微处理器3在接收到脉冲信号后进行判断,脉冲信号是由所述前进速度传感器6产生,还是由所述倒退速度传感器7产生,如果是由所述倒退速度传感器7产生,则证明汽车向后方滑行,结合所述继电器触点2反馈的触点闭合情况,如果所述继电器触点2的触点没有闭合,则倒车灯不亮,此时不是人为倒车,则汽车继电器控制双闪灯工作,微处理器3控制所述语音模块4进行语音提醒,微处理器3控制制动控制器5进行自动刹车;
如果是前进速度传感器6产生的脉冲信号,则根据空档位置传感器8反馈的信息进行判断,如果汽车当前是空档状态,则汽车继电器控制双闪灯工作,所述微处理器3控制语音模块4进行语音提醒,微处理器3控制制动控制器5进行自动刹车。
本发明的有益效果:
本发明在检测到汽车向前后方滑行时,通过语音提醒,若驾驶员未采取行动,装置会自动刹车,能够有效防止汽车向前后方滑行造成的事故。
附图说明
图1为装置原理框图。
图2为前进速度传感器和倒退速度传感器的打孔示意图。
图3为前进速度传感器和倒退速度传感器的安装结构图。
图4为继电器工作原理图。
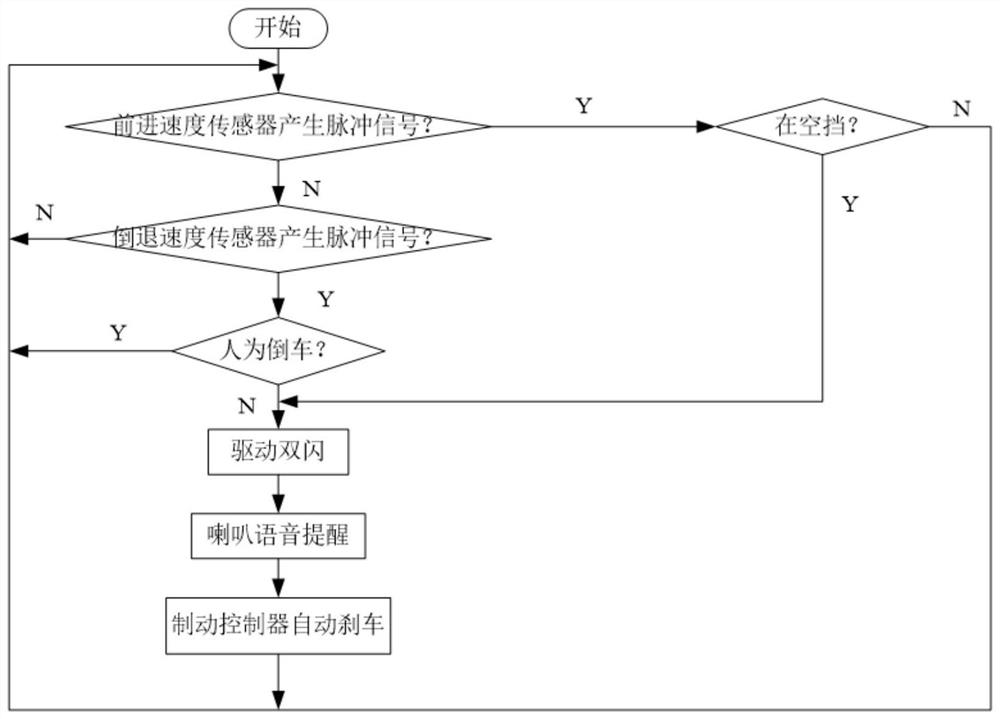
图5为装置流程图。
图6为空档位置传感器安装示意图。
具体实施方式
下面结合实施例对本发明作进一步详细说明。
参阅图1,一种防止汽车前后滑行的装置及其方法,包括汽车蓄电池1、继电器触点2、微处理器3、语音模块4、制动控制器5、前进速度传感器6、倒退速度传感器7、空档位置传感器8;所述汽车蓄电池1、继电器触点2、前进速度传感器6、倒退速度传感器7、空档位置传感器8与所述微处理器3输入端连接,所述语音模块4、制动控制器5与所述微处理器3输出端连接。
所述汽车蓄电池1采用JX27为装置供电。
装置继电器通有12V电压,与汽车倒车灯电路上的继电器的常开触点相连接,当汽车倒车时,汽车继电器常开触点闭合,倒车灯电路被接通,倒车灯亮起,此时所述继电器触点2闭合,由高电平变为低电平并将触点闭合的信号传输给所述微处理器3。
所述语音模块4包含两个喇叭,由所述微处理器3进行控制,一个装在汽车后备箱上方,一个装在仪表盘上方,播放的语音为:“汽车正在向前/后滑行,请您注意安全”用于语音提醒,所述微处理器3控制所述制动控制器5进行自动刹车。
所述制动控制器5采用盘式制动器6x001260,安装在汽车车轮上,通过增大摩擦力使得汽车起到刹车的效果。
所述前进速度传感器6、倒退速度传感器7安装在汽车轴承上,用于检测汽车车轮的转动情况,所述倒退速度传感器7产生脉冲信号,则表示汽车车轮向后转动,所述前进速度传感器6产生脉冲信号,则表示汽车车轮向前转动,将检测到的信号信息反馈给所述微处理器3进行判断当前汽车是否在向前后方滑行。
所述微处理器3在接收到脉冲信号后进行判断,脉冲信号是由所述前进速度传感器6产生,还是由所述倒退速度传感器7产生,如果是由所述倒退速度传感器7产生,则证明汽车向后方滑行,结合所述继电器触点2反馈的触点闭合情况,如果所述继电器触点2的触点没有闭合,则倒车灯不亮,此时汽车不是在倒车状态,汽车继电器控制双闪灯工作,所述微处理器3控制所述语音模块4进行语音提醒,所述微处理器3控制所述制动控制器5进行自动刹车。如果是所述前进速度传感器6产生的脉冲信号,则根据所述空档位置传感器8反馈的信息进行判断,如果汽车当前是空档状态,则汽车继电器控制双闪灯工作,所述微处理器3控制所述语音模块4进行语音提醒,所述微处理器3控制所述制动控制器5进行自动刹车。
参阅图2,为前进速度传感器和倒退速度传感器打孔的示意图,两者都采用图2所示的打孔方式,所述前进速度传感器6、倒退速度传感器7都是由带孔的圆盘11、光源9,和光电管组成,12为圆孔,10为光接收器,大圆盘半径计算公式为轮胎半径:轮胎的直径=2×L轮胎的宽度×V扁平率/100+d轮毂直径×25.4,在圆盘上每隔5mm打上一个孔,当汽车向后滑行5mm时光源透过小孔,光接收器才有信号,此时会产生一个脉冲,当所述微处理器3接收到脉冲信号时代表汽车车轮转动了5mm。
参阅图3,6为所述前进速度传感器,7为所述倒退速度传感器,15为汽车轴承,16为齿轮,17为千斤,18为弹簧片。当汽车向前行驶时,只有前进速度传感器工作,汽车轴承15向前转动,汽车轴承15带动千斤17转动,此时弹簧片18卡住齿轮16带动前进速度传感器6转动,前进速度传感器6产生脉冲信号,而同时倒退速度传感器的弹簧片被压下不能转动,倒退速度传感器不产生脉冲信号。当汽车向后滑行时,只有倒退速度传感器7工作,前进速度传感器上的弹簧被压下不能转动,弹簧片18卡住齿轮,此时倒退速度传感器7产生脉冲信号。
参阅图4,J1为汽车自带的继电器,与汽车倒车灯连接,J2为本装置带有的继电器,装置继电器J2通有12V电压,与汽车自带的继电器J1的常开触点相连接,所述继电器2与所述微处理器3的I/O口进行连接,当汽车倒车时,汽车继电器常开触点闭合,倒车灯电路被接通,倒车灯亮起,继电器J2触点2闭合,此时由高电平转为低电平,并将信号传输给所述微处理器3。
参阅图5,当所述微处理器3在接收到脉冲信号后进行判断,脉冲信号是由所述前进速度传感器6产生,还是由所述倒退速度传感器7产生,如果是由所述倒退速度传感器7产生,则证明汽车向后方滑行,结合所述继电器触点2反馈的触点闭合情况,如果所述继电器触点2的触点没有闭合,则倒车灯不亮,此时汽车不是在倒车状态,则汽车继电器控制双闪灯工作,所述微处理器3控制所述语音模块4进行语音提醒,所述微处理器3控制所述制动控制器5进行自动刹车。如果是所述前进速度传感器6产生的脉冲信号,则根据所述空档位置传感器8反馈的信息进行判断,如果汽车当前是空档状态,则汽车继电器控制双闪灯工作,所述微处理器3控制所述语音模块4进行语音提醒,所述微处理器3控制所述制动控制器5进行自动刹车。
参阅图6,为空档位置传感器安装示意图,19为光源,20为光接收器,21为拨动档位的档杆21,当档杆21在空档上时,光接收器20接收不到光源19,此时无信号产生,当档杆21离开空档的位置时,此时光接收器20可以接收到光信号,并将信号传输给所述微处理器3。
- 一种防止汽车前后滑行的装置及其方法
- 一种防止汽车在坡道上滑行的方法及其装置