一种基于DSP的四轴无人机电机转向判断系统
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及四轴无人机电机状态监测领域,具体的是一种基于DSP的四轴无人机电机转向判断系统。
背景技术
四轴无人机又称为四旋翼飞行器,已广泛应用于军事、安保及高危作业环境等领域。四轴无人机作为时下最热门的一种飞行器,已经越来越受到广大科学爱好者和商业公司的关注,可以说四轴无人机未来的发展前景十分广阔。
为了使四轴无人机能够实现垂直方向的运动,其相邻电机转向应当相反,以平衡机身的反扭距。在四轴无人机的调试过程中,需要保证电调与电机正确的电性连接,以确保四轴无人机相邻两个电机的转向相反。而在实际操作过程中,通常是操作人员通过手触摸电机的方式判断四个电机的转向,这种方式不仅容易出错,而且人手触摸高转速电机很不安全。
发明内容
为解决上述背景技术中提到的不足,本发明的目的在于提供一种基于DSP的四轴无人机电机转向判断系统,通过DSP处理器对摄像头实时采集的图像进行处理,能实现对四轴无人机上四个电机转向的判断,并将判断结果显示在显示屏上等功能,对四轴无人机的出厂或者在实际使用中对其电机转向进行判断,可以克服现有技术的不足。
本发明的目的可以通过以下技术方案实现:
一种基于DSP的四轴无人机电机转向判断系统,包括底板、图像采集单元和控制处理单元,所述图像采集单元安装在底板上;
所述图像采集单元与控制处理单元通过信号线电性连接,并将图像高速实时的传输至控制处理单元,控制处理单元实时处理传输的图像并判断待测四轴无人机电机转向,显示屏显示待测四轴无人机电机转向。
进一步地,所述图像采集单元包括支架、电机、丝杠、轴承、滑块、高速相机,支架通过螺栓固定在底板上,电机通过螺栓固定在支架的一端,轴承安装在支架的另一端,丝杠的一端通过联轴器与电机相连,丝杠的另一端安装在轴承上,滑块安装在丝杠上,高速相机通过螺栓固定在滑块上。
进一步地,所述控制处理单元包括电气控制柜、显示屏、DSP处理器、电池,所述的DSP处理器通过螺栓固定在电气控制柜上,所述的显示屏通过螺栓固定在电气控制柜上,且显示屏通过信号线线与DSP处理器电性连接,所述电池放置于电气控制柜中,且电池通过导线与DSP处理器和显示屏电性连接。
本发明的有益效果:
与现有的技术相比,本发明增加图像处理功能,采用DSP处理器和高速相机相结合能够高速实时的采集图像并进行处理,实现对四轴无人机上四个电机转向的判断,并将判断结果显示在显示屏上等功能,并且图像采集单元能够实现对不同轴距四轴无人机的电机拍照采集功能,能够对所有的四轴无人机电机转向进行判断,适用性广,对四轴无人机的出厂或者在实际使用中对其电机转向进行判断。
同时,本发明还具有结构紧凑,工作稳定可靠,设备成本低和操作简单等优点。
附图说明
下面结合附图对本发明作进一步的说明。
图1是本发明整体结构示意图;
图2是本发明图像采集单元安装位置示意图;
图3为本发明图像采集单元结构示意图;
图4为本发明运行流程图。
其中,图中标号如下:
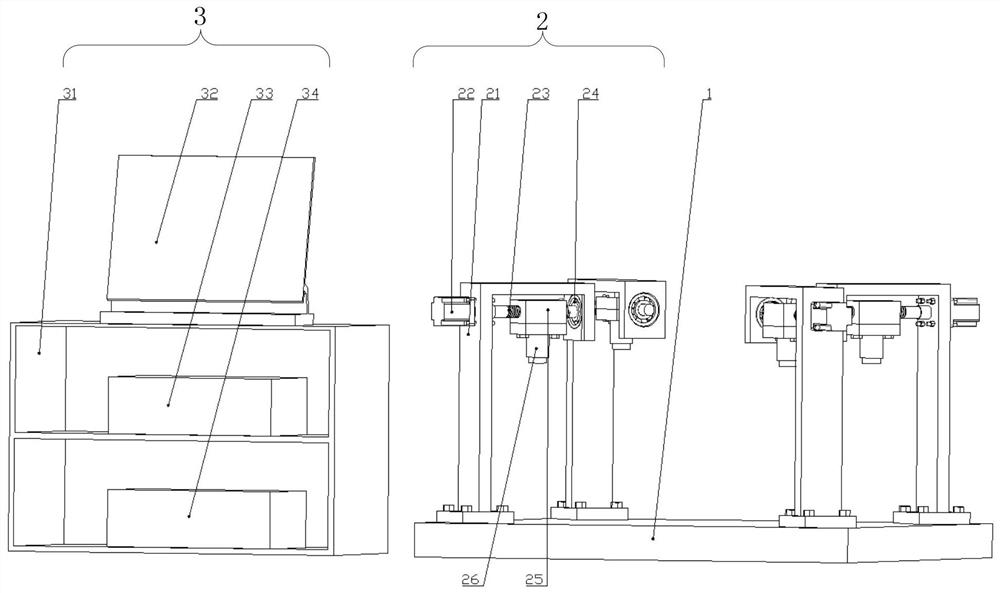
1、底板,2、图像采集单元,3、控制处理单元,21、支架,22、电机,23、丝杠,24、轴承,25、滑块,26、高速相机,31、电气控制柜32、显示屏,33、DSP处理器,34、电池。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1-4所示,一种基于DSP的四轴无人机电机转向判断系统,包括底板1、图像采集单元2、控制处理单元3,所述图像采集单元2安装在底板1上,图像采集单元2与控制处理单元3通过信号线电性连接,并通过信号线将图像采集单元2采集到的图像实时传输至控制处理单元3,控制处理单元3高速实时的处理采集到的图像并判断待测四轴无人机电机转向,显示屏32显示待测四轴无人机电机转向。
如图1-3所示,图像采集单元2包括支架21、电机22、丝杠23、轴承24、滑块25、高速相机26,支架21通过螺栓固定在底板1上,电机22通过螺栓固定在支架21的一端,轴承24安装在支架21的另一端,丝杠23的一端通过联轴器与电机22相连,丝杠23的另一端安装在轴承24上,滑块25安装在丝杠23上,高速相机26通过螺栓固定在滑块25上。
控制处理单元3包括电气控制柜31、显示屏32、DSP处理器33、电池34,所述的DSP处理器33通过螺栓固定在电气控制柜31上,所述的显示屏32通过螺栓固定在电气控制柜31上,且显示屏32通过信号线与DSP处理器32电性连接,所述电池放置于电气控制柜31中,且电池34通过导线与DSP处理器33和显示屏32电性连接。
在使用时,接通电气控制柜31中的电池34,将待测四轴无人机放置于底板1上,接通待测四轴无人机电源,DSP处理器33控制电机22转动,进而驱动丝杠23运动,使得高速相机26自行移动到与待测四轴无人机电机同轴处,高速相机26连续拍摄待测四轴无人机电机转动照片,并将所拍摄照片高速实时的传输到DSP处理器33中进行处理,DSP处理器33处理判断待测四轴无人机电机转向的结果通过显示屏32显示,并且图像采集单元2能够实现对不同轴距四轴无人机的电机拍照采集功能,适用于所有的四轴无人机电机转向的判断,为四轴无人机的出厂或者在实际使用中对其电机转向进行判断提供了解决方案。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
- 一种基于DSP的四轴无人机电机转向判断系统
- 一种基于DSP的四轴无人机电机转向判断系统