一种无人船用升降装置
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及无人船技术领域,具体为一种无人船用升降装置。
背景技术
无人船艇包括具有自主规划、自主航行、自主环境感知能力的全自主型无人船艇,以及非自主航行的遥控型无人船艇和按照内置程序航行并执行任务的半自主型无人船艇。它集船舶设计、人工智能、信息处理、运动控制等专业技术为一体,研究内容涉及自动驾驶、自主避障、规划与导航、模式识别等多方面,可根据其作战或使用功能的不同,采用不同的模块,搭载不同的传感器及设备,执行情报收集、监视侦察、扫雷、反潜、反恐、精确打击、搜寻救助、水文地理勘察、中继通信等任务。
在海上执行任务时,无人船由于体积较大,直接投入水中,会引发倾翻的可能,另外回收不便,因此我们提出了一种无人船用升降装置。
发明内容
针对现有技术存在的上述不足,本发明提供了一种无人船用升降装置,本发明对无人船进行投放,并可对无人船进行打捞,使用方便。
本发明提供如下技术方案:一种无人船用升降装置,包括轨道、移动机构、平台、横梁、支撑柱、卷扬机、船架;
所述轨道设有两个且安装在多个横梁的底端,所述横梁的两端通过支撑柱连接;
所述轨道为工型钢,所述移动机构设置在轨道上,所述平台安装在两个移动机构上,所述卷扬机安装在平台的底端,且卷扬机通过绳索与船架连接。
优选的,所述轨道的两端均匀安装有用于阻挡移动机构的挡板。
优选的,所述移动机构包括连接板、支撑板、滚轮和电机,所述支撑板设有两个且通过螺栓安装在连接板的两侧,所述支撑板的内侧面上与滚轮转动连接,所述电机的输出轴与滚轮的连接轴连接。
优选的,所述支撑板的截面呈L形,且两个支撑板安装在连接板上留有T形间隙。
优选的,所述支撑板的内侧面设有轮槽,所述滚轮位于轮槽内且通过连接轴与轮槽连接,所述电机的输出轴与一个滚轮连接。
优选的,所述船架由底板、侧板、矩形框和盖板组成,所述侧板设有两个且安装在底板的两侧,所述矩形框安装在两个侧板的顶端,所述盖板设有两个并安装两个侧板上且与底板连接。
优选的,所述底板和侧板均由金属框架组成。
优选的,所述盖板的底端通过合页安装在底板上,且盖板的顶端通过插销与侧板插接。
与现有技术对比,本发明具备以下有益效果:
该无人船用升降装置,安装在船体的边缘,并使轨道延伸出船体,通过利用卷扬机带动船架升降,并将无人船载入船架上,利用移动机构沿着轨道移动,并带动平台和底部的船架移出船体,并通过卷扬机对船架进行下放,使得船架浸入水面,并使无人船与水面接触以便于驶出船架,如此进行投放,而打捞时,无人船驶入船架内,在卷扬机和移动机构的运行下,将无人船打捞上船,如此方便无人船投放和打捞。
附图说明
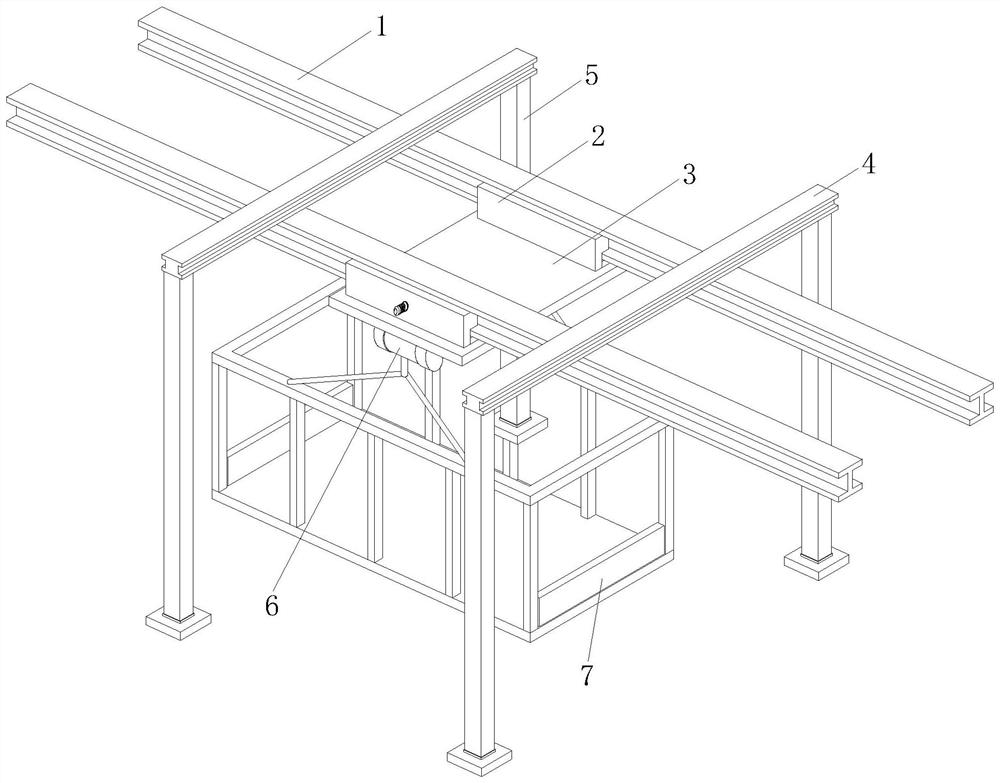
图1为本发明结构示意图;
图2为本发明移动机构的结构示意图;
图3为本发明图2的拆分结构示意图;
图4为本发明船架的结构示意图。
图中:1、轨道;2、移动机构;21、连接板;22、支撑板;23、滚轮;24、电机;3、平台;4、横梁;5、支撑柱;6、卷扬机;7、船架;71、底板;72、侧板;73、矩形框;74、盖板。
具体实施方式
为了使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述,为了保持本公开实施例的以下说明清楚且简明,本公开省略了已知功能和已知部件的详细说明,以避免不必要地混淆本发明的概念。
请参阅图1-4,一种无人船用升降装置,包括轨道1、移动机构2、平台3、横梁4、支撑柱5、卷扬机6、船架7;
所述轨道1设有两个且安装在多个横梁4的底端,所述横梁4的两端通过支撑柱5连接,利用支撑柱5安装在船体的边缘,并利用横梁4对轨道1进行支撑,使得轨道1延伸出船体,以方便投放无人船。
所述轨道1为工型钢,所述移动机构2设置在轨道1上,所述平台3安装在两个移动机构2上,所述卷扬机6安装在平台3的底端,且卷扬机6通过绳索与船架7连接,将无人船载入船架7上,利用移动机构2沿着轨道1移动,并带动平台3和底部的船架7移出船体,并通过卷扬机6对船架7进行下放,使得船架7浸入水面,并使无人船与水面接触以便于驶出船架7,如此进行投放,而打捞时,无人船驶入船架7内,在卷扬机6和移动机构2的运行下,将无人船打捞上船,如此方便无人船投放和打捞。
所述轨道1的两端均匀安装有用于阻挡移动机构2的挡板,避免移动机构2移出轨道1,具有保护作用。
所述移动机构2包括连接板21、支撑板22、滚轮23和电机24,所述支撑板22设有两个且通过螺栓安装在连接板21的两侧,所述支撑板22的内侧面上与滚轮23转动连接,所述电机24的输出轴与滚轮23的连接轴连接,利用连接板21和支撑板22组合,使其安装在轨道1上,且方便滑动,配合滚轮23,减少移动机构2与轨道1的摩擦,并通过电机24驱动滚轮23旋转,如此使得移动机构2在轨道1上移动,从而带动下方的船架7进行投放。
所述支撑板22的截面呈L形,且两个支撑板22安装在连接板21上留有T形间隙,因为轨道1为工型钢,因此连接板21和两个支撑板22之间形成的T形间隙可便于与轨道1的底端连接且不影响滑动。
所述支撑板22的内侧面设有轮槽,所述滚轮23位于轮槽内且通过连接轴与轮槽连接,所述电机24的输出轴与一个滚轮23连接,当一个滚轮23旋转后,会带动移动机构2移动,从而使其他的滚轮23随之转动,因此不需要其他传动连接装置,便于通过电机24带动移动机构2移动。
所述船架7由底板71、侧板72、矩形框73和盖板74组成,所述侧板72设有两个且安装在底板71的两侧,所述矩形框73安装在两个侧板72的顶端,所述盖板74设有两个并安装两个侧板73上且与底板71连接,船架7浸入水面只需超过盖板74即可,而无人船则漂浮在水面,可直接从盖板74上方的水面驶出。
所述底板71和侧板72均由金属框架组成,如此牢固,且在水面上直接下沉,有利于无人船驶出驶入。
所述盖板74的底端通过合页安装在底板71上,且盖板74的顶端通过插销与侧板72插接,打捞无人船时,随着船架7上升,会使无人船坐落在底板71上,且卷扬机6在牵引中,会导致船架7晃动,因此通过盖板74对无人船两端进行限位,避免无人船掉落,且盖板74便于打开,便于无人船装卸。
以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。
- 一种无人船测量船仪器升降装置
- 一种无人船用升降装置