一种具有自动驾驶功能的教育培训用驾驶车
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及教学培训用自动驾驶车装置领域,具体是一种具有自动驾驶功能的教育培训用驾驶车。
背景技术
自动驾驶技术是当前热门研究方向,也是未来实现无人物流、无人环卫、无人消杀等的必备技术。现有技术中公开了多种无人驾驶汽车的教学车辆:
如中国实用新型专利CN211555178U公开了一种无人驾驶汽车教学车辆,包括车体、无人驾驶控制系统以及可抽拉平台,无人驾驶控制系统中的教学组件装配在可抽拉平台上;教学组件包括出现故障频率较高的中控机、惯导和用于转换电压的逆变器与变压器,惯导与中控机通讯连接,车体的尾部设有打开式后尾门,打开式后尾门打开时,可抽拉平台受驱动延伸至车体外部;无人驾驶控制系统中的摄像头和毫米波雷达装配于车体的头部,无人驾驶控制系统中的激光雷达装配于车顶部。大大提高了无人驾驶汽车中部件的可见度,便于学生直观学习,同时方便老师在上述部件中增设障碍而无需拆卸。还可通过显示器实时观测汽车状态,找出障碍并通过键盘鼠标的操作解除障碍,考察和锻炼学生的动手能力。
又如中国专利CN212624468U公开了一种无人驾驶汽车自动避障停车的实训教具,该实训教具包括运转底盘、教具车,所述运转底座包括底座、旋转轮模块、前轴、后轴、皮带,所述底座为框架结构,教具车包括电源系统、行驶系统、驱动系统、控制系统。该实训教具在平时可以做为新能源汽车的底盘实训台,让学生观察到新能源纯电动汽车底盘各部分的结构,教师讲授无人驾驶汽车的自动避障停车原理时,将教具车调成自动巡航模式,使学生近距离观察到无人驾驶汽车自动避让障碍物的工作过程,配合教师的理论讲解,使得教学工作更加直观、生动,从而调动了学生的学习积极性,进而提高了教师的教学质量和学生的学习效果,让学生掌握无人驾驶汽车自动避让障碍物的原理。
上述现有技术中,有关自动驾驶技术的研究一般从成熟车型改装而来,没有专门针对自动驾驶技术教育、培训而设计的车型;并且现有车辆多为演示模型,不能实现完全的实际自动驾驶功能。
发明内容
本发明所要解决的技术问题是提供一种具有自动驾驶功能的教育培训用驾驶车,以解决现有技术中存在的缺陷。
本发明解决上述技术问题的技术方案如下:
一种具有自动驾驶功能的教育培训用驾驶车,包括线控底盘及位于所述线控底盘上方的上车体,所述上车体上设置有自动驾驶系统,其中自动驾驶系统采集自动驾驶车周围信息并生成控制指令,所述线控底盘根据控制指令可控制自动驾驶车行驶到指定位置;
其中,所述自动驾驶系统包括激光雷达、单目/双目摄像头、高性能计算单元、毫米波雷达、超声波雷达、组合惯导系统;高性能计算单元采集激光雷达、单目/双目摄像头、毫米波雷达、超声波雷达的信息并将环境信息、高精度定位与导航结合,实现路径导航及自动避障功能;
所述上车体包括前车体组架和后车体组架,所述后车体组架设置有座椅,所述上车体外侧设置有防护用的车身外饰;
所述线控底盘包括底盘架,所述底盘架上具有底盘控制器分别通过相应接口与线控转向系统、线控制动系统、线控驻车系统、线控驱动系统连接,所述线控驱动系统驱动轮胎转动;所述底盘控制器与线控转向系统、线控制动系统、线控驻车系统通过信号线连接;所述底盘架的中部设置有为线控底盘提供电源的电池及电池管理系统,所述底盘控制器与高性能计算单元连接用于接收控制指令,实现物流车路径导航及自动臂避障功能;
进一步的,所述车身外饰为塑料件或者玻璃钢材质,前车体组架和后车体组架为圆管钢架,起支撑框架作用;
进一步的,所述组合惯导系统包括位于前组合车架前方的组合惯导前天线和位于后组合车架后方的组合惯导后天线;所述前组合车架内部正对座椅设置有前显示器,所述后组合车架内部面对后方设置有后显示器,所述前显示器和后显示器均与高性能计算单元连接用于实时显示路径导航及障碍提示信息;
进一步的,所述高性能计算单元通过无线模块连接手持控制终端,所述手持控制终端的指令优先级高于自动驾驶系统的指令优先级;
进一步的,所述激光雷达位于前组合车架的上方,所述单目/双目摄像头、毫米波雷达设置有前组合车架的正前方,所述超声波雷达为多个,分布于上车体下方的四周外侧用于探测驾驶车四周环境;所述前组合车架两侧设置有后视镜;所述高性能计算单元设置于前组合车架下方的框架内;
进一步的,所述激光雷达通过可调支架固定于前组合车架上,所述可调支架包括底座、下平台、中平台和上平台,可通过下平台、中平台和上平台上的位置调整实现激光雷达角度和位置的调整;其中,所述上平台上通过螺钉固定激光雷达,所述上平台具有上平台关节,中平台具有中平台关节,所述中平台关节包括上关节和中平台下关节,所述上平台关节和中平台上关节之间通过螺栓连接,所述上平台关节上具有U型孔,通过活动上平台,使得上平台的U型孔位置与螺栓发生改变进而调整上平台的角度;所述下平台具有下平台关节,所述下平台关节上具有U型孔,所述中平台下关节与下平台之间通过螺栓连接,通过活动中平台,使得下平台的U型孔位置与螺栓发生改变进而调整中平台的角度;所述下平台通过转轴与底座连接带动激光雷达转动;
进一步的,所述单目/双目摄像头通过可调支架固定,所述可调支架包括底座、下平台和上平台,通过上平台、下平台通过上平台关节和下平台关节之间的位置关系调整实现摄像头角度和位置的调整;所述底座通过螺栓固定于前组合车架上;所述单目/双目摄像头通过L型支架与上平台连接;
本发明的有益效果是:本发明为面向自动驾驶技术研究、教学、培训及落地应用业务,集全线控底盘、车规级控制器、感知/定位/规划/控制系统等功能模块于一体的全新自动驾驶低速车平台;该平台采用模块化设计,具备全线控能力和自动驾驶功能;可以配套自动驾驶实验课程,实现自动驾驶研究、教学、培训相关需求,可以作为自动驾驶技术研究与教学的专业平台。
附图说明
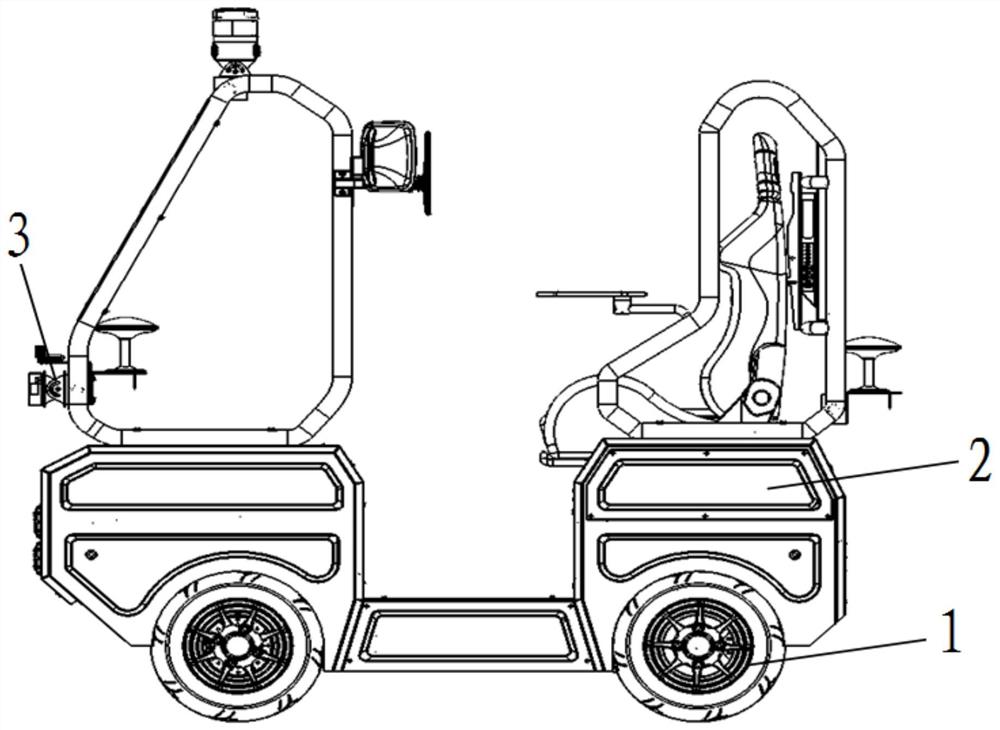
图1为本发明结构示意图;
图2为本发明线控底盘结构示意图;
图3为本发明上车体结构示意图;
图4为本发明上车体设置自动导航系统结构示意图;
图5为本发明激光雷达支架结构示意图;
图6为本发明单目/双目摄像头支架结构示意图;
附图标记说明如下:
1、线控底盘,11、底盘架,12、底盘控制器,13、线控转向系统,14、线控制动系统,15、线控驻车系统,16、线控驱动系统,17、电池及电池管理系统2、上车体,21、前车体组架,22、后车体组架,23、座椅,24、车身外饰,25、后视镜,3、自动驾驶系统,31、激光雷达,32、单目/双目摄像头,33、高性能计算单元,34、毫米波雷达,35、超声波雷达,36、组合惯导前天线,37、组合惯导后天线,38、前显示器,39、后显示器,41、底座,42、下平台,43、中平台,44、上平台,45、上平台关节,46、中平台关节,47、下平台关节;
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
如图1所示,一种具有自动驾驶功能的教育培训用驾驶车,包括线控底盘1及位于所述线控底盘1上方的上车体2,所述上车体上设置有自动驾驶系统3,其中自动驾驶系统3采集自动驾驶车周围信息并生成控制指令,所述线控底盘1根据控制指令可控制自动驾驶车行驶到指定位置;
其中,所述自动驾驶系统包括激光雷达31、单目/双目摄像头32、高性能计算单元33、毫米波雷达34、超声波雷达35、组合惯导系统;高性能计算单元采集激光雷达、单目/双目摄像头、毫米波雷达、超声波雷达的信息并将环境信息、高精度定位与导航结合,实现路径导航及自动避障功能;
如图3所示,所述上车体包括前车体组架21和后车体组架22,所述后车体组架设置有座椅23,所述上车体外侧设置有防护用的车身外饰24;
如图2所示,所述线控底盘1包括底盘架11,所述底盘架上具有底盘控制器12分别通过相应接口与线控转向系统13、线控制动系统14、线控驻车系统15、线控驱动系统16连接,所述线控驱动系统驱动轮胎转动;所述底盘控制器与线控转向系统、线控制动系统、线控驻车系统通过信号线连接;所述底盘架的中部设置有为线控底盘提供电源的电池及电池管理系统17,所述底盘控制器与高性能计算单元连接用于接收控制指令,实现物流车路径导航及自动臂避障功能;
通过设置的自动驾驶系统,在系统软件层面上设置了包括感知定位、规划决策、控制执行等功能模块。感知部分实现对环境信息的获取和目标识别,利用激光雷达、毫米波雷达、单/双目摄像头、超声波雷达等传感器,结合各个传感器的优缺点,相互补充,实现自动驾驶车辆360度全方位的障碍物检测、红绿灯识别等环境感知能力,确保车辆行驶的安全性。定位部分采用全球定位系统(GNSS)、惯性导航单元(IMU)、激光雷达等多种传感器数据融合实现车辆高精度定位,即使自动驾驶车在GNSS信号受到严重遮挡,无法提供具有稳定精度的定位信息的情况下,利用IMU和激光雷达的补充,依然具备高精度的自主定位能力。
规划决策模块结合感知定位模块得到的自身状态、周边障碍物信息以及地图等数据,做出如何行驶的决策,确定车辆保持车道、换道还是泊车。然后利用路径规划器完成规划轨迹的输出,使自动驾驶车辆知道如何走。控制执行模块作为自动驾驶系统的末端,与线控底盘相连接,根据规划的轨迹,完成对车辆动力、刹车以及转向等系统的控制,使自动驾驶车辆流畅安全的完成自动驾驶功能。
优选的,所述车身外饰为塑料件或者玻璃钢材质,前车体组架和后车体组架为圆管钢架,起支撑框架作用;
优选的,如图4所示,所述组合惯导系统包括位于前组合车架前方的组合惯导前天线36和位于后组合车架后方的组合惯导后天线37;所述前组合车架内部正对座椅设置有前显示器38,所述后组合车架内部面对后方设置有后显示器39,所述前显示器和后显示器均与高性能计算单元连接用于实时显示路径导航及障碍提示信息;
作为本发明技术方案的进一步优化改进,所述高性能计算单元通过无线模块连接手持控制终端,所述手持控制终端的指令优先级高于自动驾驶系统的指令优先级;
在具体使用时,教师通过手持控制终端控制自动驾驶系统工作,自动驾驶车在自动驾驶系统的指令控制下,发送指令给线控底盘,实现自动驾驶,学生坐在驾驶车的座椅上,通过前显示器实时观看无人驾驶路径导航及障碍信息,使学生近距离观察到无人驾驶汽车自动避让障碍物的工作过程,配合教师的理论讲解,使得教学工作更加直观、生动。
一旦驾驶车发生故障或者路径规划失败等问题出现,教师可通过手持控制终端接管驾驶车,通过人工进行操控,避免发生危险。
作为本发明技术方案的进一步优化,所述激光雷达位于前组合车架的上方,所述单目/双目摄像头、毫米波雷达设置有前组合车架的正前方,所述超声波雷达为多个,分布于上车体下方的四周外侧用于探测驾驶车四周环境;所述前组合车架两侧设置有后视镜;所述高性能计算单元设置于前组合车架下方的框架内;
优选的,如图5所示,所述激光雷达通过可调支架固定于前组合车架上,所述可调支架包括底座41、下平台42、中平台43和上平台44,可通过下平台、中平台和上平台上的位置调整实现激光雷达角度和位置的调整;其中,所述上平台上通过螺钉固定激光雷达,所述上平台具有上平台关节45,中平台具有中平台关节46,所述中平台关节包括上关节和中平台下关节,所述上平台关节和中平台上关节之间通过螺栓连接,所述上平台关节上具有U型孔,通过活动上平台,使得上平台的U型孔位置与螺栓发生改变进而调整上平台的角度;所述下平台具有下平台关节47,所述下平台关节上具有U型孔,所述中平台下关节与下平台之间通过螺栓连接,通过活动中平台,使得下平台的U型孔位置与螺栓发生改变进而调整中平台的角度;所述下平台通过转轴与底座连接带动激光雷达转动;
优选的,如图6所示,所述单目/双目摄像头通过可调支架固定,所述可调支架包括底座、下平台和上平台,通过上平台、下平台通过上平台关节和下平台关节之间的位置关系调整实现摄像头角度和位置的调整;所述底座通过螺栓固定于前组合车架上;所述单目/双目摄像头通过L型支架与上平台连接;
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种具有自动驾驶功能的教育培训用驾驶车
- 一种具有定速巡航功能的清洁车及自动驾驶定速巡航方法