控制系统以及搭载该控制系统的自动分析装置
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及控制系统以及搭载该控制系统的自动分析装置。尤其涉及对马达动作进行探测的传感器的省电控制方法。
背景技术
作为传感器的省电控制的一例,提出了如下技术:为了进行内置于马达的传感器的电力控制,在DC/DC转换器与传感器电源端子之间设置继电器驱动部,若从外部向伺服接通端子输入运转断开指令信号,则马达控制部向继电器驱动部输出打开继电器的信号,通过打开继电器来切断向传感器的电力供给,降低马达运转断开中的消耗电力。
在先技术文献
专利文献
专利文献1:日本特开平11-285282号公报
发明内容
发明要解决的课题
然而,在以往的技术中,在传感器未内置在马达的情况下,存在传感器的消耗电力比较高、而且寿命比较短的问题。
例如,在专利文献1的技术中,未公开传感器未内置在马达的情况下的处理。
本发明是为了解决这样的问题点而完成的,其目的在于提供一种控制系统以及自动分析装置,在传感器未内置在马达的情况下,通过在马达的动作的前后对向传感器的电力供给进行接通、断开控制,从而使传感器省电化以及长寿命化。
用于解决课题的手段
本发明所涉及的控制系统具备:
监视马达的动作的传感器;以及控制所述马达的动作的控制机构,
所述控制机构具备:
从所述马达开始旋转动作的时刻起仅第一规定时间前开始向所述传感器的电力供给的功能;以及
从所述马达结束旋转动作的时刻起仅第二规定时间后停止向所述传感器的电力供给的功能。
本说明书包含成为本申请的优先权的基础的日本国专利申请号2019-028360号的公开内容。
发明效果
根据本发明,通过控制探测马达动作的传感器的供给电力,能够提供具备传感器以及传感器的装置的省电化、传感器的长寿命化。
附图说明
图1是概略地表示自动分析装置的分析部的结构的图。
图2是概略地表示检体分注机构的动作的图。
图3是表示以往的检体分注机构所涉及的控制系统的图。
图4是表示实施例1的检体分注机构以及控制系统的图。
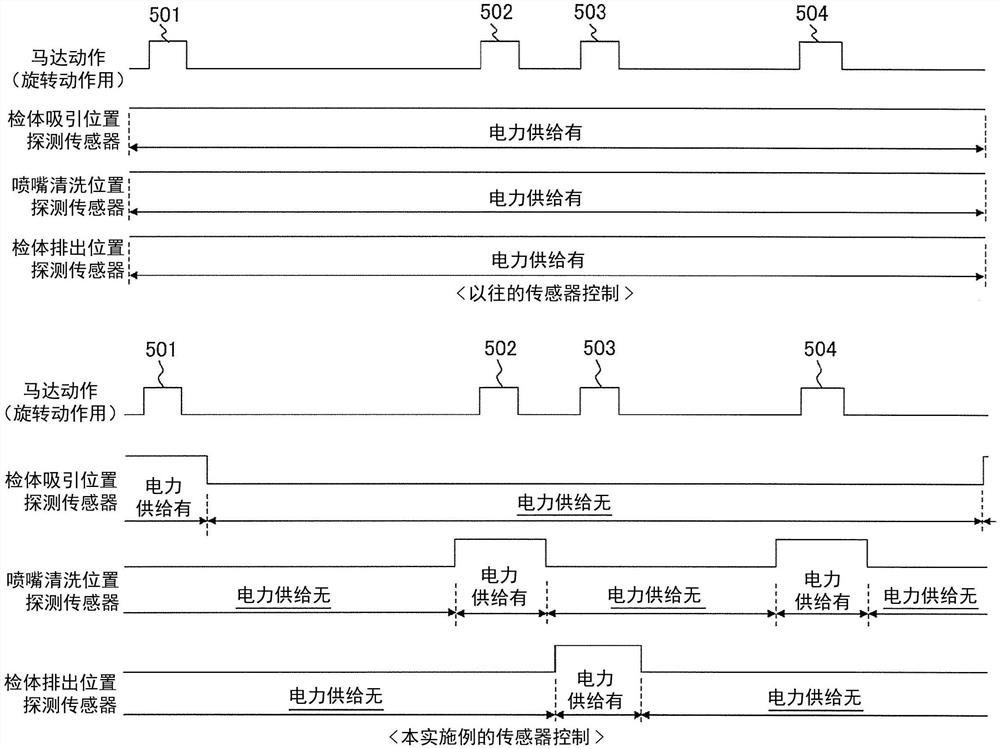
图5是表示向探测检体臂的旋转动作的传感器的电力供给时间的图。
图6是探测检体臂的旋转动作的传感器附近的概略图。
图7是表示实施例2的检体分注机构以及控制系统的图。
图8是表示实施例3的检体分注机构以及控制系统的图。
图9是表示实施例4所涉及的电力供给的开始以及停止的定时的简易图。
图10是表示在实施例5中马达不旋转的情况下的对传感器的电力供给控制的简易图。
图11是表示在实施例6中马达不旋转的情况下的对传感器的电力供给控制的简易图。
具体实施方式
以下,基于附图对本发明的实施方式进行说明。
[实施例1]
参照图1~图6,对本实施例的结构进行说明。
图1是概略地表示本实施例所涉及的成为自动分析装置的主要部分的分析部100的图。
在图1中,分析部100大致包括:检体搬运线101a、试剂搬运线101b、旋转器102、试剂盘103、反应盘104、检体分注机构105a、试剂分注机构105b、搅拌机构106、分光器107、反应单元清洗机构108、检体喷嘴清洗机构109a、试剂喷嘴清洗机构109b、反应单元112(反应容器)、屏蔽部114、控制部115、检体分注喷嘴116a、试剂分注喷嘴116b、检体液面传感器117a(关于试剂液面传感器省略图示)、检体臂118a(关于试剂臂省略图示)、检体分注机构用马达119a(关于试剂分注机构用马达省略图示)、光源灯120、数据保存部124等。
控制部115具备控制系统201(马达控制部)。这样,自动分析装置搭载控制系统201。
检体搬运线101a搬运收容成为分析的对象的血液、尿等生物体检体的检体容器110。检体搬运线101a将机架111移送到检体分注机构105a吸引检体的位置(检体吸引位置121a。也称为“检体分注位置”)的自动分析装置的各处。此外,在检体搬运线101a连接有旋转器102,通过使该旋转器102旋转,在多个检体搬运线101a间进行机架111的交换。
试剂盘103沿周向排列搭载以及搬运收容了用于检体的分析的试剂的多个试剂容器113。试剂盘103在试剂分注机构105b吸引试剂的位置(试剂吸引位置或者试剂分注位置)、试剂容器113的交换位置等旋转移送对象的试剂容器113。
反应盘104在周向上排列搭载并搬运多个将检体和试剂混合并使其反应的多个反应单元112。反应盘104将反应单元112搬运到由检体分注机构105a排出检体的检体排出位置123a、由试剂分注机构105b排出试剂的试剂排出位置123b。此外,反应盘104将反应单元112浸渍在恒温介质(例如水等)中,将作为检体和试剂的混合物的反应液保持在一定温度。此外,反应盘104将反应单元112旋转移送到通过搅拌机构106进行反应液的搅拌的搅拌位置、通过分光器107进行反应液的测定的测定位置、通过反应单元清洗机构108对结束了分析的反应单元112进行清洗的清洗位置等位置。
检体分注机构105a将检体用的分注喷嘴116浸渍在由检体搬运线101a搬运到检体吸引位置121a的检体容器110的检体中并吸引。此外,检体分注机构105a通过检体臂118a向反应盘104的反应单元112排出检体。这样,检体分注机构105a进行检体的分注。此外,同样地,试剂分注机构105b将试剂用的分注喷嘴116浸渍在由试剂盘103搬运到试剂分注位置的试剂容器113的试剂(与分析对象相应的试剂)中并进行吸引。此外,试剂分注机构105b向反应盘104的反应单元112排出试剂。这样,试剂分注机构105b进行试剂的分注。
检体分注喷嘴116a由检体臂118a保持。通过检体分注机构用马达119a使检体臂118a向上下方向以及旋转方向移动,由此检体分注机构105a移动。在检体分注机构105a的检体臂118a上设置有检体液面传感器117a,其根据检体分注喷嘴116a所涉及的静电容量变化来检测与液面的距离(或者液面的有无)。此外,在检体吸引位置121a具备用于抑制检体分注机构105a的检体的飞散的屏蔽部114。
搅拌机构106为了促进由检体分注机构105a分注到反应单元112的检体和由试剂分注机构105b分注到反应单元112的试剂的混合液(反应液)的反应而进行搅拌。
分光器107对从光源灯120照射至反应单元112内的反应液的光的透射光进行分光并测光,由此进行吸光度测定。基于该吸光度测定的结果进行比色分析。在此,分光器107和光源灯120构成用于向反应单元112的反应液照射光并对透射光进行测定的反应测定部。
当检体分注机构105a通过检体分注机构用马达119a移动到检体喷嘴清洗位置122a时,检体喷嘴清洗机构109a通过超声波进行检体分注喷嘴116a的清洗。
反应单元清洗机构108从结束了测定的反应单元112吸引反应液,向反应单元112内排出清洗剂等而进行反应单元112的清洗。
控制部115控制分析部100整体的动作,通过控制分析部100的各结构的动作来执行分析动作,基于分光器107的检测结果进行检体的分析,将检体中包含的规定成分的浓度作为分析结果输出到数据保存部124、未图示的显示部、打印机等。
图2是概略地表示检体分注机构的动作的图。
当自动分析装置的操作动作开始时,在检体搬运线101a中搬运的检体容器110停止在检体吸引位置121a。于是,由控制系统201驱动检体分注机构用马达119a。由此,检体臂118a旋转,检体臂118a移动到检体吸引位置121a后,检体分注喷嘴116a进行上下动作。这样,检体分注喷嘴116a到达能够吸引检体的位置以及高度。
检体分注喷嘴116a吸引检体后,检体分注机构用马达119a进行驱动,检体臂118a旋转。在检体臂118a移动到检体喷嘴清洗位置122a后,由检体喷嘴清洗机构109a进行检体分注喷嘴116a前端的外洗。这是为了防止检体的毛细管。在外洗后,检体分注机构用马达119a被驱动。由此,检体臂118a旋转,移动到检体排出位置123a后,检体分注喷嘴116a进行上下动作。这样,检体分注喷嘴116a到达能够排出检体的位置以及高度。
检体分注喷嘴116a排出检体后,检体分注机构用马达119a进行驱动,检体臂118a旋转。在检体臂118a移动到检体喷嘴清洗位置122a后,检体分注喷嘴116a排出残留在检体分注喷嘴116a内的检体,进行检体分注喷嘴116a的内洗以及前端的外洗。然后,检体臂118a移动到检体吸引位置121a,反复前述说明的吸引动作。该吸引以及排出的循环持续到操作动作被中断为止。
图3是表示以往的检体分注机构所涉及的控制系统的简易图。
当CPU301(Central Processing Unit,中央处理单元)发出指令时,搭载于控制器基板302(也可以称为马达控制器基板)的FPGA(Field Programmable Gate Array,现场可编程门阵列)303接收该指令,对指令进行数字信号处理并传递给马达控制器304。马达控制器304输出马达动作所需的脉冲信号。脉冲信号被输入到搭载于驱动器基板305的第一马达驱动器306a以及第二马达驱动器306b。存储部312与CPU301连接。存储部312例如是半导体存储器、硬盘驱动器。
作为驱动检体分注机构105a的马达,图1的检体分注机构用马达119a包括图3的臂旋转动作用马达307以及臂上下动作用马达308。第一马达驱动器306a以及第二马达驱动器306b控制流向臂旋转动作用马达307以及臂上下动作用马达308的电流量、方向、定时等,使这些马达动作。通过马达的动作而变化的检体分注机构105a的位置通过第一传感器309a以及第二传感器309b始终监视,直到自动分析装置的电源断开为止。自动分析装置中的检体分注机构105a的动作作为综合程序存储于存储部312。
图4是表示本发明的实施例的检体分注机构105a以及控制系统201的简易图。控制系统201具备CPU301、控制器基板302、驱动器基板305、第一传感器309a以及第二传感器309b。驱动器基板305具备驱动马达的马达驱动器电路(在该例中为第一马达驱动器306a以及第二马达驱动器306b)以及控制向传感器的电力供给的电力控制电路(在该例中为接通/断开电路401)。
此外,自动分析装置具备驱动检体分注机构105a的臂旋转动作用马达307以及臂上下动作用马达308。第一传感器309a以及第二传感器309b分别监视臂旋转动作用马达307以及臂上下动作用马达308的动作。CPU301、控制器基板302以及驱动器基板305构成控制机构,控制臂旋转动作用马达307以及臂上下动作用马达308的动作。
在图3所示的以往的控制系统中,在第一传感器309a以及第二传感器309b中,伴随自动分析装置的电源接通而供给电力,即使在检体分注机构105a不动作的装置状态下,也持续供给电力直到自动分析装置的电源断开为止。不局限于检体分注机构105a,对属于这样的机构的传感器的电力供给的电力的消耗大,并且成为了短缩传感器的寿命的系统。
在图4所示的本发明的实施例1中,当CPU301发出指令时,搭载于控制器基板302的FPGA303接收该指令,对指令进行数字信号处理并传递给马达控制器304。马达控制器304输出马达动作所需的脉冲信号。脉冲信号被输入到搭载于驱动器基板305的第一马达驱动器306a以及第二马达驱动器306b。至此为止与图3所示的以往技术实质上相同。
在本实施例中,在驱动器基板305设置有开始或者停止对第一传感器309a以及第二传感器309b的电力供给的接通/断开电路401。接通/断开电路401的动作控制例如由马达控制器304进行。例如,在马达控制器304中预先内置控制功能,按照预先存储的马达驱动模式,在马达的动作的前后进行控制,使得第一传感器309a以及第二传感器309b的电力供给接通/断开。马达驱动模式例如在分析部100开始动作前预先存储于存储部312。
图5是比较以往例以及本发明的实施例1所涉及的向对检体臂118a的旋转动作进行探测的第一传感器309a的电力供给控制而示出的图。此外,图6是第一传感器309a附近的概略图。在检体臂118a中固定有探测板601,与检体臂118a一体地旋转。旋转方向根据驱动器基板305的控制,为CCW(Counter Clockwise,反时针)方向或者CW(Clock Wise,顺时针)方向。第一传感器309a具备两个PI(Photo interrupter,光中断器)传感器部,即、PI传感器部602以及PI传感器部603。这些均作为传感器发挥功能。
当通过臂旋转动作用马达307使探测板601从图6所示的位置向CCW方向旋转时,通过PI传感器部603探测探测板601的第一边缘601a。相应地,检体臂118a的动作停止。该动作与图5的马达动作501对应,表示检体分注喷嘴116a从检体喷嘴清洗位置122a向检体吸引位置121a移动的动作。
即,图5的“检体吸引位置探测传感器”与图6的PI传感器部603对应。如图5所示,对PI传感器部603(或者第一传感器309a)仅供给马达动作501以及其前后规定时间的电力。
接下来,当通过臂旋转动作用马达307使探测板601进一步向CCW方向旋转时,通过PI传感器部602探测探测板601的第二边缘601b。相应地,检体臂118a的动作停止。该动作与图5的马达动作502对应,表示检体分注喷嘴116a从检体吸引位置121a向检体喷嘴清洗位置122a移动的动作。
即,图5的马达动作502中的“喷嘴清洗位置探测传感器”与图6的PI传感器部602对应。如图5所示,对PI传感器部602(或者第一传感器309a)仅供给马达动作501以及其前后规定时间的电力。
接下来,通过臂旋转动作用马达307,探测板601向CW方向旋转,由PI传感器部603探测探测板601的第三边缘601c。相应地,检体臂118a的动作停止。该动作与图5的马达动作503对应,表示检体分注喷嘴116a从检体喷嘴清洗位置122a向检体排出位置123a移动的动作。
即,图5的“检体排出位置探测传感器”与图6的PI传感器部603对应。如图5所示,对PI传感器部603(或者第一传感器309a)仅供给马达动作503以及其前后规定时间的电力。
接下来,通过臂旋转动作用马达307,探测板601进一步向CW方向旋转,由PI传感器部602探测探测板601的第三边缘601c。相应地,检体臂118a的动作停止。该动作与图5的马达动作504对应,表示检体分注喷嘴116a从检体排出位置123a向检体喷嘴清洗位置122a移动的动作。
即,图5的马达动作504中的“喷嘴清洗位置探测传感器”与图6的PI传感器部602对应。如图5所示,对于PI传感器部602(或者第一传感器309a),除了上述的马达动作502以及其前后以外,还在马达动作504以及其前后规定时间供给电力。
图5所示的四个马达动作501~504是检体分注机构105a的1个循环的动作。如图5所示,在以往的方法中,持续向各传感器分别供给电力,始终进行监视。与此相对,在本发明的实施例1中,如图5所示,预先存储臂旋转动作用马达307的动作模式,仅以传感器的探测所需的时间向传感器供给电力。
即,由CPU301、控制器基板302以及驱动器基板305构成的控制机构具备在预先存储的规定的定时开始以及停止向第一传感器309a、PI传感器部602或者PI传感器部603的电力供给的功能。开始以及停止电力供给的具体的定时优选由CPU301执行的程序来定义,但也可以在FPGA303中定义,也可以由马达控制器304的硬件或者软件来定义。
更详细而言,由CPU301、控制器基板302以及驱动器基板305构成的控制机构能够具备如下功能:在臂旋转动作用马达307开始旋转动作的时刻起仅第一规定时间之前,开始向第一传感器309a、PI传感器部602或者PI传感器部603的电力供给的功能;以及在臂旋转动作用马达307结束旋转动作的时刻起仅第二规定时间后停止向第一传感器309a、PI传感器部602或者PI传感器部603的电力供给的功能。与上述同样地,开始以及停止电力供给的具体的定时优选由CPU301执行的程序来定义,但也可以在FPGA303中定义,也可以由马达控制器304的硬件或者软件来定义。
第一规定时间以及第二规定时间可以相同,也可以相互不同。例如都能够设为100ms,但也可以设为10ms~200ms的范围内的值,也可以设为除此以外的值。在控制多个传感器的情况下,可以对全部的传感器而言相同,也可以对一部分传感器或者全部的传感器而言相互不同。控制机构预先存储的时刻可以是臂旋转动作用马达307开始旋转动作的时刻以及结束的时刻,也可以是对这些加减了第一规定时间以及第二规定时间的时刻。
此外,“臂旋转动作用马达307结束旋转动作的时刻”的取得方法能够任意地设计,例如可以使用第一传感器309a的探测时刻,也可以使用从马达控制器304输出的控制信号,也可以使用预先定义并存储的时刻。
例如,控制机构也可以具备以下功能:
-接通/断开电路401进行控制,以使得开始向第一传感器309a、PI传感器部602或者PI传感器部603的电力供给的功能;
-接通/断开电路401进行控制,以使得开始向第一传感器309a、PI传感器部602或者PI传感器部603的电力供给起仅第五规定时间后,第一马达驱动器306a开始臂旋转动作用马达307的旋转动作的功能;
-接通/断开电路401开始向第一传感器309a、PI传感器部602或者PI传感器部603的电力供给起仅第六规定时间后停止向所述传感器的电力供给的功能。
第五规定时间以及第六规定时间能够基于上述的第一规定时间以及第二规定时间等适当设计。例如,第五规定时间也可以是与第一规定时间相等的时间。此外,第六规定时间也可以是第一规定时间、第二规定时间以及马达的动作时间之和。
通过本方法,能够降低传感器的消耗电力。例如,设检体分注机构105a的动作1循环为3.6s。在以往技术中,始终对传感器进行电力供给,与此相对,若应用本方法,则存在每1次马达动作时向传感器的电力供给平均为0.5s的情况。因此,若假定利用不同的传感器分别进行4次位置探测的结构,则相对于以往技术,能够将消耗电力降低至0.5/3.6=1/7.2≈14%。
理想的是,希望刚刚在马达动作的开始之前开始向传感器的电力供给,刚刚在马达动作刚结束后停止向传感器的电力供给。然而,实际上需要考虑传感器的响应速度等,因此在本实施例中,在马达动作的前后具有100ms的富余而进行电力供给的接通、断开。本实施例是关于检体分注机构105a的实施例,但只要是用于检测马达的动作或者旋转位置的传感器就能够应用。例如,在由分析部100构成的过程中,能够应用于在搬运线101、旋转器102、试剂盘103、反应盘104、反应单元清洗机构108、喷嘴清洗机构109中使用的传感器,能够应用于在装置中使用的大部分传感器。另外,关于始终需要电力供给的传感器(用于通过加热将反应液始终保持为一定温度的温度传感器、探测试剂的断液的传感器等),有可能存在一部分不能应用本实施例的传感器。
此外,假定自动分析装置在医院、委托临床检查事业中使用,在装置的电源投入后,在待机模式(待命状态)或者操作模式(分析动作状态)中的任一模式下使用。特别是在待机模式中,除了始终需要电力供给的一部分传感器(前述的温度传感器等)以外,相对于始终进行向传感器的电力供给的以往技术,在本方法中不进行电力供给,因此认为本发明的效果较大。
通过本方法,能够实现自动分析装置的省电化以及传感器的长寿命化。
此外,在实施例1中,由于第一马达驱动器306a、第二马达驱动器306b以及接通/断开电路401全部设置于相同的驱动器基板305,因此能够使基板的数量比较少。
[实施例2]
实施例2是在实施例1中将电力控制电路设为其他基板的例子。以下,参照图5以及图7对本发明的实施例2进行说明。
图7是表示本发明的实施例2的检体分注机构105a以及控制系统201的简易图。
在实施例2中,控制系统201具备与驱动器基板305不同的追加驱动器基板310。在实施例1中说明的控制系统201的动作的过程中,从驱动各马达的马达控制器304输出的信号不仅传递到驱动器基板305,还传递到追加驱动器基板310。
控制系统201具备第一电力控制电路311a以及第二电力控制电路311b。在实施例2中,电力控制电路不是设置为接通/断开电路401,而是设置为第一电力控制电路311a以及第二电力控制电路311b。第一电力控制电路311a以及第二电力控制电路311b分别内置接通/断开电路,搭载于追加驱动器基板310。来自马达控制器304的信号也被输入到第一电力控制电路311a以及第二电力控制电路311b。
马达控制器304输出控制马达的旋转动作的旋转控制信号。第一电力控制电路311a以及第二电力控制电路311b分别内置接通/断开电路,接收该旋转控制信号,根据该旋转控制信号,控制向对应的传感器(分别为第二传感器309b以及第一传感器309a)的电力供给。
在本实施例中,由于将电力控制电路设置于与马达驱动器不同的基板,因此具有能够不对以往的控制器基板302以及驱动器基板305进行基板变更而直接沿用的优点。
根据本实施例,如图5所示,能够仅以传感器的监视所需的时间供给电力,实现自动分析装置的省电化以及传感器的长寿命化。
[实施例3]
实施例3是以下实施例:在实施例1中,通过综合程序(综合软件)来实现电力控制电路的功能。以下,参照图5以及图8对本发明的实施例3进行说明。
图8是表示本发明的实施例的检体分注机构105a以及控制系统201的简易图。
CPU301执行存储于存储部312中的综合程序,由此实现实施例1中说明的控制系统201的动作。马达的动作例如也可以预先定义为综合程序的固定参数。CPU301通过执行综合程序来实现控制向第一传感器309a以及第二传感器309b的电力供给的功能。即,CPU301通过执行综合程序,经由马达控制器304、第一马达驱动器306a以及第二马达驱动器306b,控制第一传感器309a以及第二传感器309b的电力供给的接通、断开。
另外,虽然在图8中未特别示出,但在实施例3中,也可以设置对向传感器的电力供给进行控制的电力控制电路。
这样,控制系统201具备控制器基板302以及控制器基板302的CPU301,通过CPU301执行综合程序,控制系统201实现各功能。
通过实施例3,例如能够执行图5所示的监视臂旋转动作用马达307的第一传感器309a的电力控制,因此能够实现自动分析装置的省电化以及传感器的长寿命化。
此外,在实施例3中,不是通过马达控制器304而是通过综合程序来定义向传感器的电力供给所涉及的控制动作的定时,因此也能够不变更以往的马达控制器304而进行沿用。
[实施例4]
实施例4是以下实施例:在实施例1中,变更对传感器的电力供给的开始以及停止的定时。以下,参照图5以及图9对本发明的实施例4进行说明。
在图5的例子中,作为监视臂旋转动作用马达307的动作的传感器,在动作1个循环整体中,示出检体吸引位置探测传感器、喷嘴清洗位置探测传感器、检体排出位置探测传感器的三个传感器。在本实施例中,假定三个传感器分别构成为不同的硬件的情况。在该情况下,电力供给时间被分散到三个传感器。
如喷嘴清洗位置探测传感器那样,也存在在1个循环动作中进行2次动作的传感器。在图5的例子中,从喷嘴清洗位置探测传感器的马达动作502到下一个马达动作503为止具有约900ms的间隔。因此,即使在各马达动作的前后具有100ms的富余而进行向喷嘴清洗位置探测传感器的电力供给的接通、断开,到下一个探测动作为止的时间的富余也大,响应速度等不会成为问题。
但是,在装置的动作上,存在需要以更小的间隔进行马达的动作的监视的情况。图9是表示实施例4所涉及的电力供给的开始以及停止的定时的简易图。2次的马达动作的间隔小,小于300ms。若这样间隔变小,则根据传感器的响应速度等性能,有可能导致误动作。
因此,在实施例4中,在马达动作间的间隔小于规定时间的情况下,继续向传感器的电力供给。即,关于马达,在从结束第一旋转动作起到开始接着第一旋转动作之后的第二旋转动作为止的时间小于规定时间(第三规定时间)的情况下,控制机构从结束第一旋转动作到开始第二旋转动作为止,继续向传感器的电力供给。
该第三规定时间例如能够设为300ms。在该情况下,可以认为在马达动作的前后具有100ms的富余,适合传感器的响应速度等性能。如图9所示,在马达动作的间隔小于300ms的情况下,向传感器的电力供给的开始从第一次的马达动作的开始时刻起仅100ms前,向传感器的电力供给的停止从第二次马达动作的结束时刻起仅100ms后。
第三规定时间不限于300ms。例如可以设为200ms~400ms的范围内的值,也可以设为除此以外的值。
或者,控制机构能够具备如下功能:
-电力控制电路(例如接通/断开电路401)进行控制,以使得开始向传感器的电力供给的功能;
-电力控制电路进行控制以使得开始向传感器的电力供给起仅第七规定时间后,马达驱动器电路(例如第一马达驱动器306a)进行控制以使得开始马达(例如臂旋转动作用马达307)的第一旋转动作的功能;
-马达驱动器电路进行控制以使得开始马达的第一旋转动作后,马达驱动器电路进行控制以使得停止马达的所述第一旋转动作的功能;
-马达驱动器电路进行控制以使得停止马达的第一旋转动作后,马达驱动器电路进行控制以使得开始马达的第二旋转动作的功能;以及
-电力控制电路在开始向传感器的电力供给起仅第八规定时间后,停止向传感器的电力供给的功能。
其中,第八规定时间是预先存储的时间,以使得从马达的第一旋转动作开始起到第二旋转动作停止为止继续向传感器的电力供给。
第七规定时间以及第八规定时间能够基于上述的第一规定时间以及第二规定时间等适当设计。例如,第七规定时间也可以是与第一规定时间相等的时间。此外,第八规定时间也可以是第一规定时间、从第一旋转动作开始到第二旋转动作结束为止的时间和第二规定时间之和。
若设为这样的电力供给动作,则即使在传感器的响应速度成为问题而马达动作间隔小的情况下,也能够供给电力以使得传感器可靠地进行动作。此外,由于在不需要电力供给的情况下能够断开,因此能够实现自动分析装置的省电化以及传感器的长寿命化。
[实施例5]
实施例5是以下实施例:在实施例1中变更为在未检测出马达的旋转动作的情况下输出警报。以下,参照图10,对本发明的实施例5进行说明。
图10是表示在本实施例中马达不旋转的情况下的对传感器的电力供给控制的简易图。作为不旋转的原因,可以考虑失步等。
与实施例1~4同样地,在从马达开始旋转动作的时刻起100ms前开始向传感器的电力供给。之后,马达开始旋转动作是正常的动作。在此,假设马达因某种原因而不旋转,即使在经过了正常的定时(即向传感器的电力供给开始起100ms后)之后也不动作。
在实施例6所涉及的控制系统201中,控制机构具备如下功能:在开始向传感器的电力供给后,在传感器未检测出马达的旋转动作的状态下经过了第四规定时间的情况下,输出警报信号。第四规定时间例如能够设定为100ms。第四规定时间也可以是对100ms加上任意的富余时间而得到的时间。
控制机构也可以将在传感器未检测出马达的旋转动作的状态下经过了第四规定时间的状态判断为异常状态(或者失步状态)。警报信号的形式、内容以及输出方法等能够由本领域技术人员任意地设计,例如,在自动分析装置具备马达控制部的情况下,也可以经由马达控制部向CPU301传递警报信号。此外,CPU301也可以通过执行综合程序来接收警报信号。在自动分析装置具备GUI(Graphical User Interface,图形用户接口)的情况下,CPU301也可以在GUI上显示警告。
此外,在马达正常动作的期间,实施例5所涉及的控制系统201与实施例1~4同样地动作,因此能够实现自动分析装置的省电化以及传感器的长寿命化。此外,如图10所示,控制系统201在输出了警报信号之后,切断向传感器的电力供给。此时,马达控制器304对抑制马达的将来的旋转的制动机构施加励磁,使马达不旋转。由此,能够实现自动分析装置的省电化以及传感器的长寿命化。
此外,根据实施例5,在马达不正常旋转的情况下输出警报信号,因此能够准确地检测马达的异常。
[实施例6]
实施例6是以下实施例:在实施例5中变更为不切断向传感器的电力供给。以下,参照图11,对本发明的实施例6进行说明。
图11是表示在本实施例中马达不旋转的情况下的对传感器的电力供给控制的简易图。与实施例5(图10)不同,控制机构输出警报信号后,继续向传感器的电力供给。即,在输出了警报信号后,在从马达结束旋转动作的时刻起经过了第二规定时间后,也继续向传感器的电力供给。换言之,在输出警报信号之后,不执行“停止向传感器的电力供给的功能”。更详细而言,在输出了警报信号之后,不执行“从马达结束旋转动作的时刻起仅第二规定时间后停止向传感器的电力供给的功能”。由此,在马达延迟而开始旋转动作的情况下,能够对其进行检测。另外,马达控制器304不进行用于抑制马达的将来的旋转的控制(对制动机构施加励磁等)。
在马达正常动作的期间,实施例6所涉及的控制系统201与实施例1~5同样地动作,因此能够实现自动分析装置的省电化以及传感器的长寿命化。
此外,根据实施例6,在马达不正常旋转的情况下输出警报信号,因此能够准确地检测马达的异常。
在上述的实施例1~6中,以第一传感器309a以及臂旋转动作用马达307为例进行了说明的部分也能够同样地应用于第二传感器309b以及臂上下动作用马达308,进而也能够同样地应用于其他传感器与其他马达的组合。
此外,在上述的实施例1~6中,以分注检体的检体臂118a为例进行了说明的部分也能够同样地应用于分注试剂的试剂臂。
-符号说明-
100…分析部,101…搬运线,102…旋转器,103…试剂盘,104…反应盘,106…搅拌机构,107…分光器,108…反应单元清洗机构,109…喷嘴清洗机构,110…检体容器,111…机架,112…反应单元,113…试剂容器,114…屏蔽部,115…控制部,116…分注喷嘴,120…光源灯,124…数据保存部,201…控制系统,301…CPU,302…控制器基板,303…FPGA,304…马达控制器,305…驱动器基板,307…臂旋转动作用马达(马达),308…臂上下动作用马达(马达),309a…第一传感器(传感器),309b…第二传感器(传感器),310…追加驱动器基板,401…断开电路,501,502,503,504…马达动作,601…探测板,602,603…PI传感器部(传感器),101a…检体搬运线,101b…试剂搬运线,105a…检体分注机构,105b…试剂分注机构,109a…检体喷嘴清洗机构,109b…试剂喷嘴清洗机构,116a…检体分注喷嘴,116b…试剂分注喷嘴,117a…检体液面传感器,118a…检体臂,119a…检体分注机构用马达,121a…检体吸引位置,122a…检体喷嘴清洗位置,123a…检体排出位置,123b…试剂排出位置,306a…第一马达驱动器,306b…第二马达驱动器,309a…第一传感器,309b…第二传感器,311a…第一电力控制电路,311b…第二电力控制电路,601a…第一边缘,601b…第二边缘,601c…第三边缘。
本说明书中引用的全部刊行物、专利以及专利申请按原样引用来整合到本说明书中。
- 控制系统以及搭载该控制系统的自动分析装置
- 光谱照相机控制装置、光谱照相机控制方法、光谱照相机控制系统、搭载有该系统的飞行体