双面晶圆成像装置及其方法
文献发布时间:2023-06-19 11:59:12
技术领域
本申请案主张2020年1月22日申请的美国正式申请案第16/748,823号的优先权及益处,该美国正式申请案的内容以全文引用的方式并入本文中。
本公开涉及一种成像装置。特别是涉及一种双面晶圆成像装置及其方法。
背景技术
半导体产业经历了持续的快速增长,而其部分原因是制造流程以及元件整合。在半导体元件制造期间,晶圆经常由于异物污染或其他污染或晶圆上的区域缺陷而损坏。以人工检查此类缺陷是昂贵、费时且不均匀的。再者,背面的晶圆影像是被不同接触点以及粒子所占据。因此,最佳化双面晶圆成像和检查过程是至关重要。
上文的“先前技术”说明仅是提供背景技术,并未承认上文的“先前技术”说明揭示本公开的标的,不构成本公开的先前技术,且上文的“先前技术”的任何说明均不应作为本案的任一部分。
发明内容
本公开的一实施例提供一种双面晶圆成像装置,包括一或多个装载端,用于一自动搬运装置的一晶圆盒的一自动装载操作或是卸载操作;一或多个机械手臂,用于搬运一晶圆;一晶圆传输载台,包括三或多个真空吸点,是接触该晶圆的一背面,该晶圆传输载台还包括一驱动马达,是产生一线性来回移动,以移动该晶圆;一第一线扫描相机,安装在该晶圆传输载台下方;一第二线扫描相机,安装在该晶圆传输载台上方;一第一光学镜片,安装在该第一线扫描相机上;一第二光学镜片,安装在该第二线扫描相机上;以及二或多个线光源,分别安装在该晶圆传输载台的下方及上方。
在本公开的一些实施例中,该二或多个线光源输出一黄光或一白光。
在本公开的一些实施例中,该双面晶圆成像装置还包括一或多个晶圆对准器,用于调整该晶圆的一位置及一转动角度、返回该晶圆到一原点以及读取一标签。
在本公开的一些实施例中,该双面晶圆成像装置还包括一空气注入元件,包括一第一喷嘴,是对准该第一线扫描相机的该第一光学镜片。
在本公开的一些实施例中,该空气注入元件还包括一第二喷嘴,是对准该第二线扫描相机的该第二光学镜片。
在本公开的一些实施例中,该空气注入元件注入一气流,以避免多个粒子粘贴到该第一光学镜片以及该第二光学镜片。
在本公开的一些实施例中,当该晶圆尚未通过该双面晶圆成像装置进行成像时,则该空气注入元件注入该气流。
本公开的另一实施例提供一种晶圆双面的成像方法。该成像方法包括:撷取该晶圆的一双面影像,其中当该晶圆通过该晶圆传输载台在一往外行程进行搬运时,分别安装在该晶圆传输载台下方及上方的一第一线扫描相机以及一第二线扫描相机,是分别截取该晶圆的该双面影像的一第一背面晶圆影像以及一前面晶圆影像;转动该晶圆一预定角度,其中当该晶圆达到该往外行程的一端点时,则位在该晶圆下方的一晶圆对准器是沿着一垂直方向上升,以拿取该晶圆、转动该晶圆该预定角度以及返回该晶圆到该晶圆传输载台;当该晶圆通过该晶圆传输载台在一返回行程进行搬运时,则撷取一第二背面晶圆影像,位在该晶圆传输载台下方的该第一线扫描相机是撷取该第二背面晶圆影像;以及执行一影像处理操作,其中被在该第一背面晶圆影像中的一或多个接触点所占据的一或多个区域,是以该第二背面晶圆影像取代该第一背面晶圆影像,而成像更加清晰。
在本公开的一些实施例中,该二或多个线光源是分别安装在该晶圆传输载台的下方及上方,而该二或多个线光源输出一黄光或一白光。
在本公开的一些实施例中,一空气注入元件包括一第一喷嘴,是对准该第一线扫描相机的一第一光学镜片。
在本公开的一些实施例中,该空气注入元件还包括一第二喷嘴,是对准该第二线扫描相机的一第二光学镜片。
在本公开的一些实施例中,该空气注入元件注入一气流,以避免多个粒子粘贴到该第一光学镜片以及该第二光学镜片。
在本公开的一些实施例中,当该晶圆尚未进行成像时,该空气注入元件注入该气流。
本公开的另一实施例提供一种晶圆的双面缺陷检查及分类的方法。该方法包括:撷取一背面晶圆影像以及一前面晶圆影像;确定一深度学习物件检测模型是否可用;当该深度学习物件检测模型可用时,馈送每一被检测的影像进入该深度学习物件检测模型,并输出多个输出数据,其中每一输出数据包括在该影像中的一缺陷的一预测概率、一预测分类以及一预测图框位置;滤除具有低于一预设临界值的一预测概率的数据;通过使用一非最大压制演算法从多个预测图框中选择一最佳预测图框,而该多个预测图框具有大于该预设临界值的一交叠率(intersection over union);依据该预测分类及该预测图框位置以计算一缺陷特征值;以及输出该前面晶圆影像与该背面晶圆影像的一检测结果。
在本公开的一些实施例中,该方法还包括:当该深度学习物件检测模型不可用时,标示多个晶圆影像为一训练数据,并标记在所述晶圆影像中的每一缺陷的一位置与一分类,其中该缺陷位置是以围绕该缺陷的一正方形图框表示,并记录该正方形图框的左上顶点及右下顶点的影像坐标;以及训练该深度学习物件检测模型,其中一预定数量的该训练数据是用于训练该深度学习物件检测模型。
在本公开的一些实施例中,一第一线扫描相机以及一第二线扫描相机分别安装在一晶圆传输载台的下方及上方,并分别撷取该背面晶圆影像以及该前面晶圆影像,二或多个线光源分别安装在该晶圆传输载台的下方及上方,且该二或多个线光源输出一黄光或一白光。
在本公开的一些实施例中,一空气注入元件包括一第一喷嘴,是对准该第一线扫描相机的一第一光学镜片。
在本公开的一些实施例中,该空气注入元件包括一第二喷嘴,是对准该第二线扫描相机的一第二光学镜片。
在本公开的一些实施例中,该空气注入元件注入一气流,以避免多个粒子粘贴到该第一光学镜片与该第二光学镜片。
在本公开的一些实施例中,当该晶圆尚未成像时,该空气注入元件注入该气流。
据此,由于本公开的双面晶圆成像装置以及双面晶圆成像与检测方法,可大大地降低由人工检测所造成的错误与成本。再者,可通过高精准度的自动流程获得未遮挡的背面晶圆影像。当相较于人工检测时,该双面晶圆成像装置以及双面晶圆成像与检测方法亦通过人工智能演算法允许快速收集与分析缺陷数据。
上文已相当广泛地概述本公开的技术特征及优点,而使下文的本公开详细描述得以获得较佳了解。构成本公开的权利要求标的的其它技术特征及优点将描述于下文。本公开所属技术领域中具有通常知识者应了解,可相当容易地利用下文揭示的概念与特定实施例可作为修改或设计其它结构或制程而实现与本公开相同的目的。本公开所属技术领域中具有通常知识者亦应了解,这类等效建构无法脱离后附的权利要求所界定的本公开的精神和范围。
附图说明
参阅实施方式与权利要求合并考量附图时,可得以更全面了解本申请案的揭示内容,附图中相同的元件符号是指相同的元件。
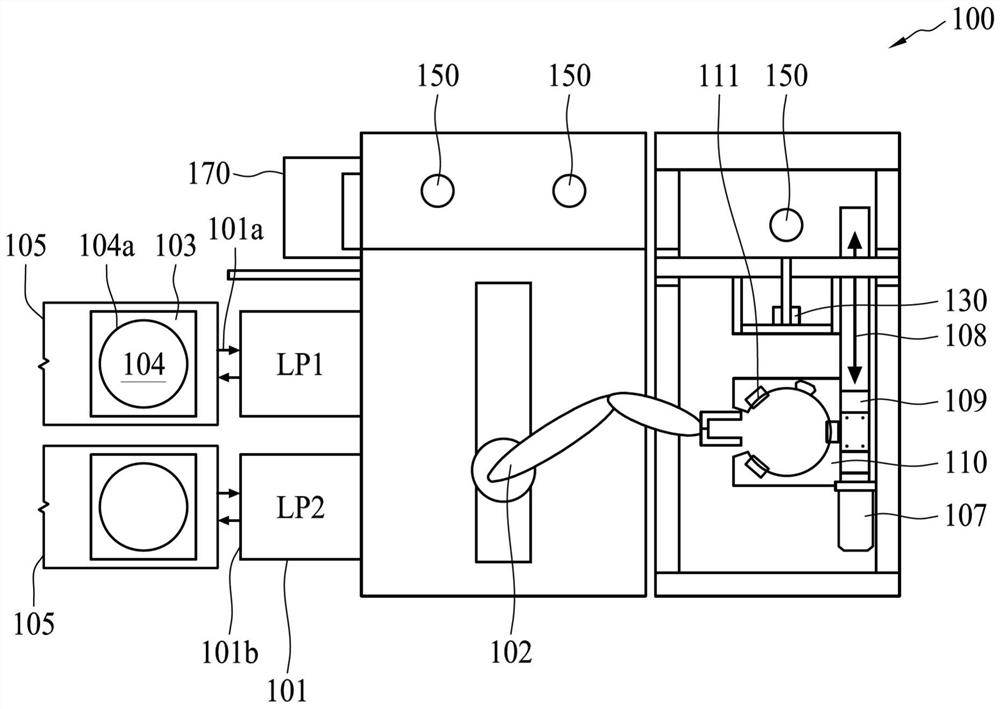
图1为依据本公开一些实施例的一种双面晶圆成像装置的结构示意图。
图2A为依据本公开一些实施例的一种双面晶圆成像装置的部分顶视示意图。
图2B为依据本公开一些实施例的一种双面晶圆成像装置的部分后视示意图。
图2C为依据本公开一些实施例的一种双面晶圆成像装置的部分侧视示意图。
图3为依据本公开一实施例的一种晶圆双面的成像方法的流程示意图。
图4为依据本公开一些实施例的一种深度学习物件检测系统的方块示意图。
图5为依据本公开一实施例的一种晶圆的双面缺陷检查及分类的方法的流程示意图。
其中,附图标记说明如下:
40:深度学习物件检测模型
41:检测模块
42:分类模块
50:深度学习物件检测系统
51:分类模块
52:融合模块
100:双面晶圆成像装置
101a:自动装载操作
101b:自动卸载操作
102:机械手臂
103:晶圆盒
104:晶圆
104a:背面
105:自动搬运装置
107:驱动马达
108:线性来回移动
109:滑移载台
110:晶圆传输载台
111:真空吸点
120:第一线扫描相机
121:第一光学镜片
130:第二线扫描相机
131:第二光学镜片
140:线光源
150:晶圆对准器
160:空气注入元件
161:第一喷嘴
162:第二喷嘴
170:处理元件
300:成像方法
400:检测及分类方法
DOUT:输出数据
IMG_INS:被检测的影像
IMG_TR:训练数据
LP1:装载端
LP2:装载端
S310:步骤
S320:步骤
S330:步骤
S340:步骤
S410:步骤
S420:步骤
S430:步骤
S440:步骤
S450:步骤
S460:步骤
S470:步骤
S480:步骤
S490:步骤
具体实施方式
本公开的以下说明伴随并入且组成说明书的一部分的附图,说明本公开的实施例,然而本公开并不受限于该实施例。此外,以下的实施例可适当整合以下实施例以完成另一实施例。
应当理解,虽然用语“第一(first)”、“第二(second)”、“第三(third)”等可用于本文中以描述不同的元件、部件、区域、层及/或部分,但是这些元件、部件、区域、层及/或部分不应受这些用语所限制。这些用语仅用于从另一元件、部件、区域、层或部分中区分一个元件、部件、区域、层或部分。因此,以下所讨论的“第一装置(firstelement)”、“部件(component)”、“区域(region)”、“层(layer)”或“部分(section)”可以被称为第二装置、部件、区域、层或部分,而不背离本文所教示。
本文中使用的术语仅是为了实现描述特定实施例的目的,而非意欲限制本发明。如本文中所使用,单数形式“一(a)”、“一(an)”,及“该(the)”意欲亦包括复数形式,除非上下文中另作明确指示。将进一步理解,当术语“包括(comprises)”及/或“包括(comprising)”用于本说明书中时,所述术语规定所陈述的特征、整数、步骤、操作、元件,及/或组件的存在,但不排除存在或增添一或更多个其他特征、整数、步骤、操作、元件、组件,及/或上述各者的群组。
图1为依据本公开一些实施例的一种双面晶圆成像装置100的结构示意图。图2A为依据本公开一些实施例的一种双面晶圆成像装置100的部分顶视示意图。图2B为依据本公开一些实施例的一种双面晶圆成像装置100的部分后视示意图。图2C为依据本公开一些实施例的一种双面晶圆成像装置100的部分侧视示意图。请参考图1以及图2A到图2C,双面晶圆成像装置100包括一或多个装载端(LP1、LP2)、一或多个机械手臂102、一晶圆传输载台110、一第一线扫描相机120、一第二线扫描相机130、一第一光学镜片121、一第二光学镜片131以及二或多个线光源140,第一线扫描相机120安装在晶圆传输载台110下方,第二线扫描相机130安装在晶圆传输载台110上方,第一光学镜片121安装在第一线扫描相机120上,第二光学镜片131安装在第二线扫描相机130上,二或多个线光源140分别安装在晶圆传输载台110的下方及上方。在一些实施例中,所述装载端LP1、LP2是经配置以用于一自动搬运装置(automated transport equipment)105的一晶圆盒(wafer pod)103的一自动装载(load)操作101a或是卸载(unload)操作101b。机械手臂102是经配置以用于搬运一晶圆104到在双面晶圆成像装置100的不同预定位置。在一些实施例中,晶圆传输载台110包括三或多个真空吸点111,是接触晶圆104的一背面104a。晶圆传输载台110还包括一驱动马达107,是产生一线性来回移动108,以移动晶圆104穿过一滑移载台(slide stage)109。
在一些实施例中,如图2B及图2C所示的二或多个线光源140可输出一黄光或一白光。在一些实施例中,双面晶圆成像装置100还包括一或多个晶圆对准器(wafer aligners)150,是经配置以用于调整晶圆104的一位置与一转动角度、返回晶圆104到一原点以及读取一标签。在一些实施例中,双面晶圆成像装置100还包括一处理元件170。处理元件170可用于执行多个成像与缺陷分析方法的演算法(algorithms)与指令(instructions),以及双面晶圆成像装置100的程序,而这些方法将在本公开之后的文中详述。
在一些实施例中,双面晶圆成像装置100还可包括一空气注入元件160,如图2C所示。空气注入元件160包括一第一喷嘴161,是对准第一线扫描相机120的第一光学镜片121。在一些实施例中,空气注入元件160还可包括一第二喷嘴162,是对准第二线扫描相机130的第二光学镜片131。在一些实施例中,空气注入元件160可注入适合压力的一气流(airstream),以避免多个粒子粘贴到第一线扫描相机120与第二线扫描相机130的第一光学镜片121与第二光学镜片131。在一些实施例中,当晶圆104尚未通过双面晶圆成像装置100进行成像时,则空气注入元件160注入气流。
在一些实施例中,图1以及图2A到图2C所示的双面晶圆成像装置100是提供一种晶圆双案成像的方法。图3为依据本公开一实施例的一种晶圆104双面的成像方法300的流程示意图。请参考图3,在步骤S310中,该方法300包括撷取晶圆104的一双面影像。当晶圆104通过一晶圆传输载台110在一往外行程(outbound trip)中搬运时,分别安装在晶圆传输载台100的下方与上方的一第一线扫描相机120与一第二线扫描相机130,是分别撷取晶圆104的双面影像的一第一背面晶圆影像以及一前面晶圆影像。在步骤S320中,晶圆104是转动一预定角度。当晶圆104到达该往外行程的一端点(end point)时,则位在晶圆104下方的晶圆对准器150是沿着一垂直方向上升,以拿取晶圆104、转动晶圆104该预定角度以及返回晶圆104到晶圆传输载台110。在步骤S330中,是撷取一第二背面晶圆影像。当晶圆104通过晶圆传输载台110在一返回行程(return trip)中搬运时,位在晶圆传输载台110下方的第一线扫描相机120是撷取第二背面晶圆影像。在步骤S340中,是执行一影像处理操作,其中被在该第一背面晶圆影像中的一或多个接触点所占据的一或多个区域,是以该第二背面晶圆影像取代该第一背面晶圆影像,而得到一个完全无遮蔽的晶圆背面影像。
在该方法300的一些实施例中,二或多个线光源1401分别安装在晶圆传输载台110的下方及上方,且二或多个线光源140输出一黄光或一白光。
在该方法300的一些实施例中,空气注入元件160包括一第一喷嘴161,是对准第一线扫描相机120的第一光学镜片121。在该方法300的一些实施例中,空气注入元件160还包括一第二喷嘴162,是对准第二线扫描相机130的第二光学镜片131。在该方法300的一些实施例中,空气注入元件160注入适当压力的一气流,以避免多个粒子粘贴到第一光学镜片121与第二光学镜片131。在该方法300的一些实施例中,当晶圆104尚未成像时,则空气注入元件160注入气流。
在一些实施例中,在图1以及图2A到图2C所示的双面晶圆成像装置100还可提供一种晶圆的双面缺陷检测与分类的方法。图4为依据本公开一些实施例的一种深度学习物件检测系统50的方块示意图。图5为依据本公开一实施例的一种晶圆104的双面缺陷检查及分类的方法400的流程示意图。请参考图4及图5,深度学习物件检测系统50可用在晶圆104的双面缺陷检测与分类方法400。深度学习物件检测系统50包括一深度学习物件检测模型40、一分类模块51以及一融合模块(fusion module)52。深度学习物件检测模型40可包括一检测模块41以及一分类模块42。在一些实施例中,若是适于特定应用的话,则其他部件(components)亦可包含在深度学习物件检测系统50中。在步骤410中,该方法400包括撷取一背面晶圆影像以及一前面晶圆影像,举例来说,其是使用双面晶圆成像装置100的第一线扫描相机120以及第二线扫描相机130。在步骤S420中,是确认一深度学习物件检测模型40是否可用。在步骤S430中,当深度学习物件检测模型40不可用时,则多个晶圆影像是标示成一训练数据IMG_TR,以及在所述晶圆影像中的每一缺陷是标记一位置及一分类。通过围绕缺陷的一正方形图框表示缺陷位置,并记录正方形图框的左上顶点及右下顶点的影像坐标。在步骤S440中,训练深度学习物件检测模型40,例如在深度学习物件检测系统50的训练模块51,其中一预定数量的训练数据IMG_TR是用于训练深度学习物件检测模型40。在步骤S450中,当深度学习物件检测模型40可用时,则每一被检测的影像IMG_INS是馈入到深度学习物件检测模型40中,并输出多个输出数据DOUT。每一输出数据DOUT包括在影像中的一缺陷的一预测概率、一预测分类以及一预测图框位置(frame position)。在一些实施例中,可通过使用深度学习物件检测系统50的检测模块41、分类模块42以及融合模块52以获得输出数据DOUT。在步骤S460中,滤除具有低于一预设临界值的一预测概率的数据。在步骤S470中,通过使用非最大压制演算法(non-maximum suppression algorithm),一最佳预测图框是选自具有大于该预设临界值的一交叠率(intersection over union)的多个预测图框。在步骤S480中,依据预测分类及预测图框位置以计算出一缺陷特征值。在步骤S490中,输出前面晶圆影像及背面晶圆影像的一检测结果。
在该方法400的一些实施例中,第一线扫描相机120与第二线扫描相机130分别安装在一晶圆传输载台110的下方与上方,以分别撷取背面晶圆影像与前面晶圆影像,二或多个线光源分别安装在晶圆传输载台110的下方及上方,且二或多个线光源140输出一黄光或一白光。
在该方法400的一些实施例中,空气注入元件160包括一第一喷嘴161,是对准第一线扫描相机120的第一光学镜片121。在该方法400的一些实施例中,空气注入元件160还包括一第二喷嘴162,是对准第二线扫描相机130的第二光学镜片131。在该方法400的一些实施例中,空气注入元件160注入适当压力的一气流,以避免多个粒子粘贴到第一光学镜片121与第二光学镜片131。在该方法400的一些实施例中,当晶圆104尚未成像时,则空气注入元件160注入气流。
应当理解,图1所示的双面晶圆成像装置100的处理元件170可用于执行双面晶圆成像装置100、该方法300以及该方法400的操作(operations)、功能性(functionalities)、演算法(algorithms)以及指令(instructions)。处理元件170可包括一处理器、一存储器、一网络接口、一存储元件以及经由一总线(bus)或其他内连接沟通机制(interconnectioncommunication mechanism)(图未示)而沟通地耦接的一输入/输出元件。在一些实施例中,存储器可为一随机存取存储器(RAM)、其他动态存储元件、只读存储器(ROM),或其他耦接到总线的其他静态存储元件,而该其他静待存储元件是用于存储数据或指令,而所述数据或指令是通过处理器执行。在一些实施例中,存储器亦可使用于存储在指令执行期间的暂时变数或其他中间信息,而暂时变数或其他中间指令是通过处理器执行。在一些实施例中,一存储元件(图未示)是耦接到用于存储数据与指令的总线,而存储元件是例如一磁盘(magnetic disk)或光盘(optical disk)。输入/输出元件可包括用于令使用者与双面晶圆成像装置100互动一输入元件、一输出元件,或是一组合的输入/输出元件。举例来说,一输入元件包括用于向处理器传送信息及命令的一键盘、小键盘(keypad)、鼠标、轨迹球(trackball)、轨迹垫(trackpad)或游标方向键。举例来说,一输出元件包括用于传送信息到一使用者的一显示器、一打印机或一语音合成器(voice synthesizer)。
在一些实施例中,图1到图5所述的装置及方法的一或多个操作或功能性,是可通过处理元件170的处理器所实现,其是用于执行此等操作与功能性的程序化。一或多个存储器、网络接口、存储元件、输入/输出元件、硬件部件以及总线是可操作,以接收通过处理元件170的处理器所处理的指令、数据、设计规则、网络连线表(netlists)、布局图(layouts)、模型(models)以及其他参数。
在一些实施例中,图1到图5所述的装置与方法的一或多个操作或功能性是可通过特别配置的硬件(例如通过一或多个特殊应用集成电路(application specificintegrated circuit,ASIC))所实现,其是与处理元件170的处理器相互间隔或替代处理元件170的处理器。一些实施例是可在单一ASIC中合并一个以上的所述的操作与功能性。在一些实施例中,所述操作与功能性是可当成存储在非暂态电脑可读记录媒体(non-transitory computer readable recording medium)的一程序的功能所实现。非暂态电脑可读记录媒体的例子是包括一外部/可移除或内部/内建存储或存储器单元,但并不以此为限,例如一或多个光盘、一磁盘以及一半导体存储器,而光盘是例如DVD,磁盘是例如一硬盘,半导体存储器是例如ROM、RAM或记忆卡。
据此,由于本公开的双面晶圆成像装置100以及双面晶圆成像与检测方法300与400,可大大地降低由人工检测所造成的错误与成本。再者,可通过高精准度的自动流程获得未遮挡的背面晶圆影像。当相较于人工检测时,该双面晶圆成像装置100以及双面晶圆成像与检测方法300与400亦通过人工智能演算法允许快速收集与分析缺陷数据。
本公开的一实施例提供一种双面晶圆成像装置,包括一或多个装载端,用于一自动搬运装置的一晶圆盒的一自动装载操作或是卸载操作;一或多个机械手臂,用于搬运一晶圆;一晶圆传输载台,包括三或多个真空吸点,是接触该晶圆的一背面,该晶圆传输载台还包括一驱动马达,是产生一线性来回移动,以移动该晶圆;一第一线扫描相机,安装在该晶圆传输载台下方;一第二线扫描相机,安装在该晶圆传输载台上方;一第一光学镜片,安装在该第一线扫描相机上;一第二光学镜片,安装在该第二线扫描相机上;以及二或多个线光源,分别安装在该晶圆传输载台的下方及上方。
本公开的另一实施例提供一种晶圆双面的成像方法。该成像方法包括:撷取该晶圆的一双面影像,其中当该晶圆通过该晶圆传输载台在一往外行程进行搬运时,分别安装在该晶圆传输载台下方及上方的一第一线扫描相机以及一第二线扫描相机,是分别截取该晶圆的该双面影像的一第一背面晶圆影像以及一前面晶圆影像;转动该晶圆一预定角度,其中当该晶圆达到该往外行程的一端点时,则位在该晶圆下方的一晶圆对准器是沿着一垂直方向上升,以拿取该晶圆、转动该晶圆该预定角度以及返回该晶圆到该晶圆传输载台;当该晶圆通过该晶圆传输载台在一返回行程进行搬运时,则撷取一第二背面晶圆影像,位在该晶圆传输载台下方的该第一线扫描相机是撷取该第二背面晶圆影像;以及执行一影像处理操作,其中被在该第一背面晶圆影像中的一或多个接触点所占据的一或多个区域,是以该第二背面晶圆影像取代该第一背面晶圆影像,而得到一个完全无遮蔽的晶圆背面影像。
本公开的另一实施例提供一种晶圆的双面缺陷检查及分类的方法。该方法包括:撷取一背面晶圆影像以及一前面晶圆影像;确定一深度学习物件检测模型是否可用;当该深度学习物件检测模型可用时,馈送每一被检测的影像进入该深度学习物件检测模型,并输出多个输出数据,其中每一输出数据包括在该影像中的一缺陷的一预测概率、一预测分类以及一预测图框位置;滤除具有低于一预设临界值的一预测概率的数据;通过使用一非最大压制演算法从多个预测图框中选择一最佳预测图框,而该多个预测图框具有大于该预设临界值的一交叠率(intersection over union);依据该预测分类及该预测图框位置以计算一缺陷特征值;以及输出该前面晶圆影像与该背面晶圆影像的一检测结果。
虽然已详述本公开及其优点,然而应理解可进行各种变化、取代与替代而不脱离权利要求所定义的本公开的精神与范围。例如,可用不同的方法实施上述的许多制程,并且以其他制程或其组合替代上述的许多制程。
再者,本申请案的范围并不受限于说明书中所述的制程、机械、制造、物质组成物、手段、方法与步骤的特定实施例。该技艺的技术人士可自本公开的揭示内容理解可根据本公开而使用与本文所述的对应实施例具有相同功能或是达到实质上相同结果的现存或是未来发展的制程、机械、制造、物质组成物、手段、方法、或步骤。据此,此等制程、机械、制造、物质组成物、手段、方法、或步骤是包含于本申请案的权利要求内。
- 晶圆的双面抛光方法及使用该双面抛光方法的外延晶圆的制造方法以及外延晶圆
- 双面晶舟、晶圆翻转装置及晶圆翻转方法