一种基于轨道结构的自行走多功能机器人
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及铁路维护应用技术领域,尤其是一种基于轨道结构的自行走多功能机器人。
背景技术
近些年,我国高速铁路、城际铁路、城市轨道交通快速发展,运营里程逐年增加,为了保证轨道线路安全稳定运营,需长期对轨道线路进行维修、养护、检测,相关事宜日渐繁重。同时,随着人力、物力成本的增加,如何在有限的天窗时间内,高效的应用人力资源完成现场多项任务工作,是目前摆在铁路行业面前的一大难题。
钢轨是轨道结构中的重要部件之一,承担着引导车轮、传递载荷的作用,直接关系到轨道交通运营的安全性和经济性,对钢轨服役状态的养护与检测一直是工务部门的重点工作之一。现今,若仅依靠工务人员现场实地工作的方式,很难继续在我国大运营里程的背景下高效运转。
近些年,高速铁路小半径曲线钢轨侧磨逐渐加剧,尤其是存在较多小半径曲线的城际铁路。对于普速或重载铁路,常使用油脂类润滑剂减轻小半径曲线段的轮轨磨耗,然而由于油脂类润滑剂流动性好的特点,应用于高速铁路时,存在润滑剂上轨面导致车轮打滑的风险。采用固体润滑剂对高速铁路小半径曲线钢轨进行润滑,是解决高铁钢轨磨耗过快的一种解决方案。然而,固体润滑剂不易涂抹至轨侧,常需要人工涂覆,人力与时间成本花费较多。
发明内容
为克服现有的缺陷,本发明提出了一种基于轨道结构的自行走多功能机器人。
一种基于轨道结构的自行走多功能机器人,包括机器人行走部、机械臂、横梁、控制箱和锂电池,所述机器人行走部包括第一机器人行走部和第二机器人行走部;横梁包括第一横梁和第二横梁,所述第一机器人行走部和第二机器人行走部通过第一横梁和第二横梁连接并固定,所述机械臂设置于机器人行走部上,控制箱和锂电池设置于横梁上。
其中,机器人行走部包括前轮、后轮和连接板,所述前轮和后轮分别设置于连接板两端并通过螺栓固定,其中,所述连接板表面设置定位卡槽,连接板侧面设置机械臂安装板。
其中,机械臂包括伺服电机、丝杠、固体润滑块卡槽和恒力传感器,所述伺服电机通过丝杠连接固体润滑块卡槽,固体润滑块通过恒力传感器设置于固体润滑块卡槽中。机械臂外壳框架可插入机器人行走部的连接板卡槽内,再由螺栓将机械臂与机器人行走部的连接板相互紧固。
其中,横梁上设置合页结构,横梁两端设置定位销。每根横梁装配了两处合页结构,用于折叠,便于携带装箱。横梁两端设置定位销,与机器人行走部连接板的定位孔相互对应,便于现场组装。
其中,前轮和后轮表面为橡胶材质,后轮内置轮毂电机,车轮廓形设计为锥形型面。车轮表面为橡胶材质,摩擦系数大,同时可满足左右股钢轨相互绝缘的要求。后轮内置轮毂电机,可实现机器人行走部前行与后退的运动功能。车轮廓形设计为锥形型面以提高机器人过曲线及对中性能。
其中,在连接板中部放置可安装机械臂的定位卡槽,定位卡槽具有不同高度定位孔,将机械臂安装至不同的定位孔时,可调节机械臂的工作位置,从而调整润滑块与钢轨侧磨的接触位置。
当横梁与机器人行走部相互连接时,横梁上的通信接头插入机器人行走部连接板的通信插座,此时不仅机械部件互相定位紧固,同时也相互联通了控制箱-电源-轮毂电机-伺服电机,满足了供电与通信控制需求。
本发明通过基于轨道结构的自行走多功能机器人解决小半径曲线钢轨侧磨速率较快的问题,可高效率地将固体润滑剂涂覆于目标钢轨,节约人力与时间成本。同时,自行走机器人还可集成具有其他功能的机械臂,以满足其他现场需求,如对下股钢轨轨面进行摩擦系数控制,对钢轨表面状态进行评估与探伤等。
附图说明
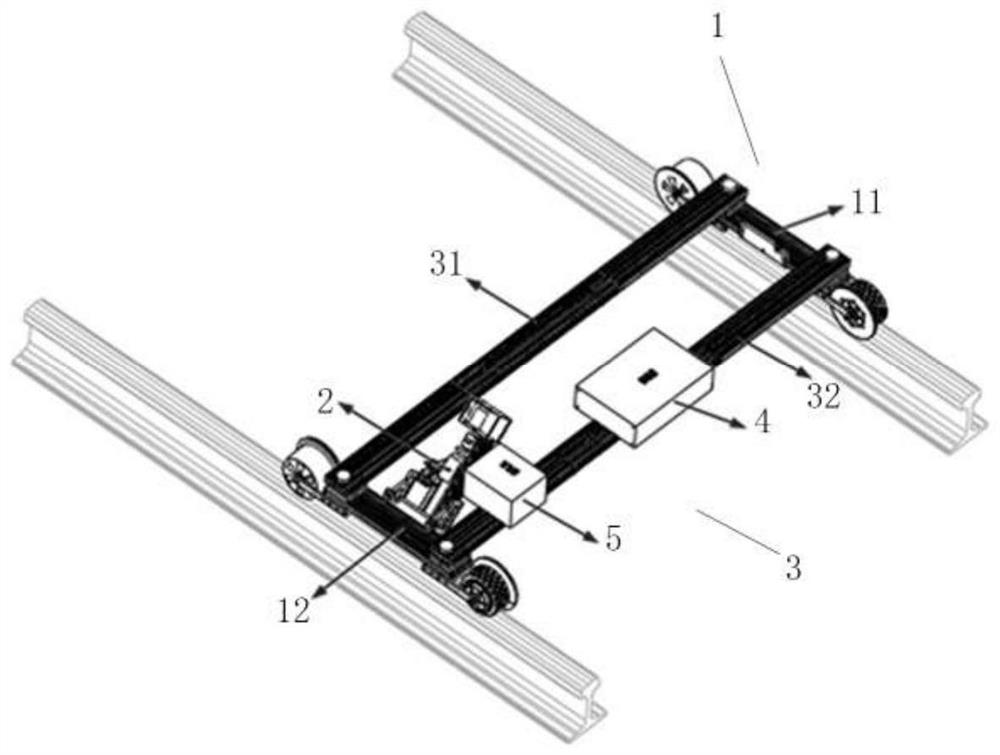
图1为基于轨道结构的自行走多功能机器人结构示意图。
图2为机器人行走部示意图。
图3为机械臂示意图。
图4为横梁示意图。
具体实施方式
下面结合附图和具体实施例对本发明提供的一种基于轨道结构的自行走多功能机器人进行详细描述。
如图1-4所示,一种基于轨道结构的自行走多功能机器人,包括机器人行走部1、机械臂2、横梁3、控制箱4和锂电池5,所述机器人行走部1包括第一机器人行走部11和第二机器人行走部12;横梁3包括第一横梁31和第二横梁32,所述第一机器人行走部11和第二机器人行走部12通过第一横梁31和第二横梁32连接并固定,所述机械臂2设置于机器人行走部1上,控制箱4和锂电池5设置于横梁3上。
机器人行走部1包括前轮13、后轮14和连接板15,所述前轮13和后轮14分别设置于连接板15两端并通过螺栓16固定,其中,所述连接板15表面设置定位卡槽16,连接板15侧面设置机械臂安装板17。
机械臂2包括伺服电机21、丝杠22、固体润滑块卡槽23和恒力传感器24,所述伺服电机21通过丝杠22连接固体润滑块卡槽23,固体润滑块231通过恒力传感器24设置于固体润滑块卡槽23中。机械臂外壳框架可插入机器人行走部的连接板卡槽内,再由螺栓将机械臂与机器人行走部的连接板相互紧固。
当伺服电机收到工作指令后,由伺服电机推动丝杠向下运动,丝杠与固体润滑块连接,因此固体润滑块随丝杠共同向下运动,运动方向与钢轨平面呈45°角,接触于钢轨侧缘,通过恒力传感器保证润滑块均匀的涂覆速率。当润滑指令结束后,固体润滑块随丝杠返回至初始位置,不再与钢轨接触。
横梁3上设置合页结构33,横梁3两端设置定位销34。
前轮13和后轮14表面为橡胶材质,后轮内置轮毂电机141,车轮廓形设计为锥形型面。车轮表面为橡胶材质,摩擦系数大,同时可满足左右股钢轨相互绝缘的要求。后轮内置轮毂电机,可实现机器人行走部前行与后退的运动功能。车轮廓形设计为锥形型面以提高机器人过曲线及对中性能。
定位卡槽16上设置定位销槽161和通讯插座162,机械臂安装板17上设置定位孔171。在连接板中部放置可安装机械臂的定位卡槽,定位卡槽具有不同高度定位孔,将机械臂安装至不同的定位孔时,可调节机械臂的工作位置,从而调整润滑块与钢轨侧磨的接触位置。
横梁与机器人行走部1的连接板15为型材设计,其内部放置导线,用于通信与供电。当横梁与机器人行走部相互连接时,横梁上的通信接头插入机器人行走部连接板的通信插座,此时不仅机械部件互相定位紧固,同时也相互联通了控制箱-电源-轮毂电机-伺服电机,满足了供电与通信控制需求。
控制箱4集成了电机控制系统。控制箱4外部为触摸屏,可根据线路条件,编程式输入机器人运行参数,具体可设置参数包括:机器人运行速度(快、中、慢)、运行方向(前进或后退)、运行距离、润滑状态(不润滑、左侧润滑、右侧润滑)及润滑块下压力(5N~12N可调)。
此外,控制箱4内同时集成了远程操作系统,可方便工作人员在100米的范围内通过遥控器对机器人进行远程操作。
现场使用过程中,首先明确需要进行工作的线路里程区间,曲线方向为左侧还是右侧,分为几个区段,曲线长度是多少。根据以上前期调研,明确机器人工作的线路条件,制定具体工作参数。
由工人将机器人组装箱携带至目标铁道线路,将机器人行走部、机械臂、横梁、控制箱与锂电池就地组装,放置固体润滑块,连接相关控制导线。
组装完成后,先简单试运行一段距离,检验机器人的工作效果是否满足要求,调整至最佳参数。
自行走机器人可采用两种工作模式,其一,若线路条件简单,工作距离较短,其他外部影响因素较少,属于短距离往返型工作特点,可在控制面板上设置相关参数,程序化控制机器人,不需要工务人员随行。其二,若线路条件复杂,工作距离较长,其他外部影响因素较多,则可选择遥控跟随型工作模式,即1名工务人员随机器人沿途行走,远程控制机器人。此外,由于工作距离较远,当固体润滑剂消耗殆尽时,需人为更换新的润滑材料。
自行走机器人工作结束后,工务人员需将其拆卸装箱,拆卸过程需注意是否存在零件脱落,保证机器人各部件的完整性,不可遗落于实际线路。
最后应说明的是,以上实施例仅用以描述本发明的技术方案而不是对本技术方法进行限制,本发明在应用上可以延伸为其他的修改、变化、应用和实施例,并且因此认为所有这样的修改、变化、应用、实施例都在本发明的精神和教导范围内。
- 一种基于轨道结构的自行走多功能机器人
- 一种基于餐厅悬空轨道的行走结构及行走控制方法