一种精密机械零部件自动化加工设备
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及机械技术领域,具体为一种精密机械零部件自动化加工设备。
背景技术
零部件加工是指通过一种机械设备对零部件的外形尺寸或性能进行改变的过程,按加工方式上的差别可分为切削加工和压力加工。
零部件在生产过程中,需要将零部件根据使用者的实际需要进行打磨抛光,现有的零部件在打磨过程中需要将零部件进行稳定夹持,对零部件外壁进行打磨,现有的零部件内壁尺寸多样,传统打磨装置不便于根据零部件尺寸进行夹持打磨,不便于使用使用,设备通配性较低,增加工作人员劳动强度,费时费力,安全性和可靠性不高,现在的架构安装便捷性与使用稳定性都有待提高,为此,我们提出一种精密机械零部件自动化加工设备。
发明内容
本发明的目的在于提供一种安装便捷,方便对精密机械零部件进行自动加工,使用安全性的精密机械零部件自动化加工设备,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种精密机械零部件自动化加工设备,包括基板、侧板、三角板、支撑柱和零件筒,所述基板上表面固定安装有侧板,所述侧板与基板通过三角板固定连接,所述基板下表面固定安装有支撑柱,所述基板上表面活动安装有零件筒,其特征在于:所述基板上表面位于零件筒的对应位置固定安装有夹持装置,所述基板下表面位于零件筒的对应位置固定安装有抛光装置。
优选的,所述夹持装置包括支撑板、驱动机构、限位机构、夹持板和支撑架,所述基板上表面固定安装有支撑板,所述支撑板上表面位于侧板的对应位置固定安装有驱动机构,所述所述驱动机构输出端固定安装有限位机构,所述限位机构外壁等距安装有夹持板,所述基板上表面位于限位机构的对应位置固定安装有支撑架。
优选的,所述驱动机构包括固定架、电机、电动伸缩杆、连接架、滑动筒、第一连接块、第二连接块和转动板,所述侧板一侧固定安装有固定架,所述固定架内壁固定安装有电机,所述电机输出端转动安装有电动伸缩杆,所述电动伸缩杆输出端固定安装有连接架,所述连接架远离电动伸缩杆的一端固定安装有滑动筒,所述滑动筒外壁等距安装有第一连接块,所述第一连接块内壁转动安装有转动板,所述转动板远离第一连接块的一侧转动安装有第二连接块,且连接块与夹持板固定连接。
优选的,所述限位机构包括定位柱、定位筒、第一定位块、连接板和第二定位块,所述滑动筒内壁滑动安装有定位柱,且定位柱与支撑架固定连接,所述定位柱外壁等距套设有定位筒,所述定位筒外壁等距安装有第一定位块,所述第一定位块内壁转动安装有连接板,所述连接板远离第一定位块的一端转动安装有第二定位块,且第二定位块与夹持板固定连接。
优选的,所述抛光装置包括安装槽、抛光机构和打磨圈,所述基板内壁位于零件筒的对应位置开设有安装槽,所述加班下表面固定安装有抛光机构,所述抛光机构上表面位于零件筒的对应位置转动安装有打磨圈。
优选的,所述抛光机构包括第一定位板、马达、底座、第二定位板、螺纹杆、滑杆、移动块和限位架,所述基板下表面位于安装槽的对应位置固定安装有第一定位板,所述第一定位板内壁固定安装有马达,所述马达与基板通过底座固定连接,所述马达输出端固定安装有螺纹杆,所述基板下表面位于螺纹杆筛网对应位置固定安装有第二定位板,所述第一定位板内壁位于第二定位板的对应位置固定安装有滑杆,所述螺纹杆外壁啮合安装有移动块,所述移动块上表面固定安装有限位架,且限位架内壁转动安装有打磨圈。
与现有技术相比,本发明的有益效果是:
通过将零件筒内壁放置于夹持板外壁,通过电动伸缩杆驱动连接架带动滑动筒在定位柱外壁进行滑动,通过滑动筒带动第一连接块带动转动板进行转动,使第二连接块带动夹持板根据零件筒内壁大小进行夹持,通过连接板在第二定位块与第一定位块内壁进行转动,使第二定位块带动夹持板配合转动板转动,使夹持板对零件筒内壁进行夹持,再通过电机进行匀速转动,通过马达带动螺纹杆转动,使移动块在螺纹杆外壁进行转动,使移动块配合滑杆进行位置移动,带动打磨圈在零件筒外壁进行往复移动,实现打磨圈对零件筒外壁进行精细打磨,此装置的设置通过夹持装置对零件筒进行稳定夹持,实现了根据不同零件筒内壁直径大小进行夹持,提高设备的通配性,便于使用者使用,通过抛光装置的往复直线运动配合零件筒的高速转动,保证对零件筒表面打磨抛光的精细程度,提高使用者的使用便捷性。
附图说明
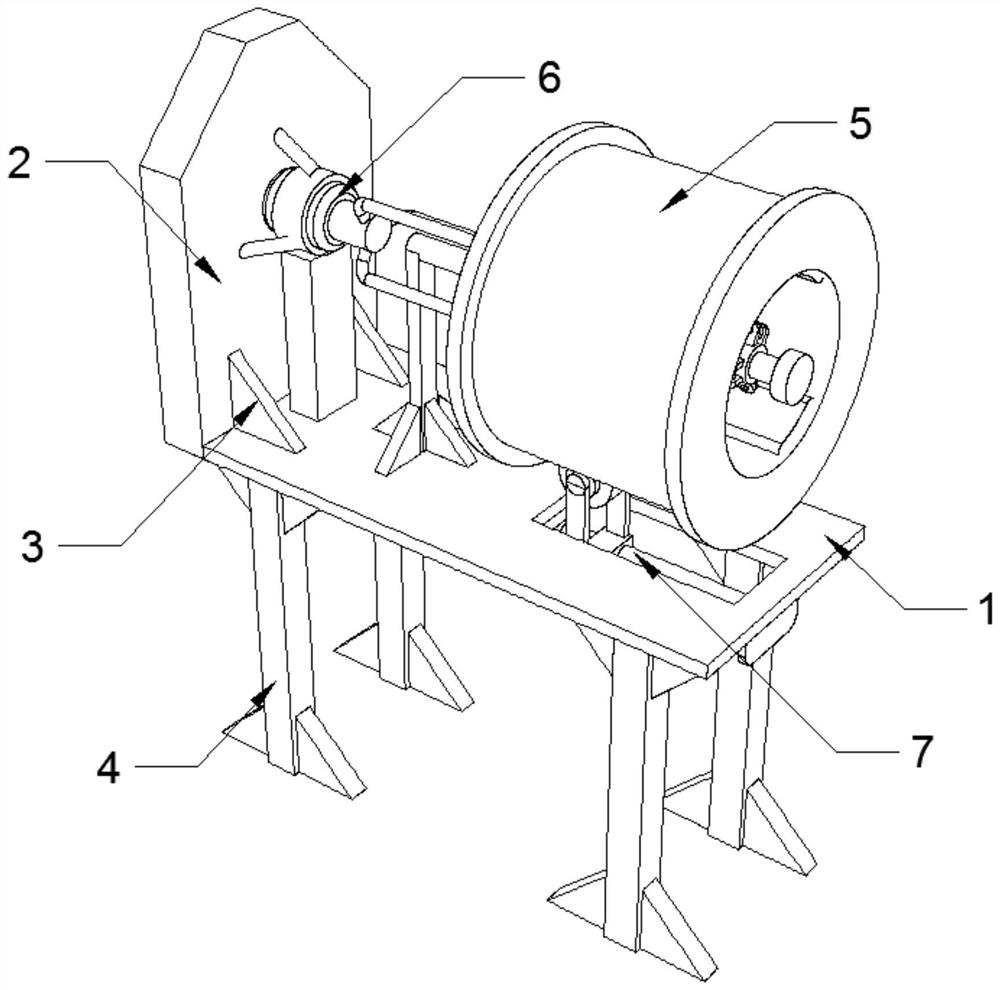
图1为本发明的整体结构示意图;
图2为本发明的整体安装分布结构示意图;
图3为本发明的夹持装置结构示意图;
图4为本发明的驱动机构和限位机构结构示意图;
图5为本发明的夹持板安装分布结构示意图;
图6为本发明的抛光装置安装分布结构示意图;
图7为本发明的抛光机构安装分布结构示意图。
图中:1、基板;2、侧板;3、三角板;4、支撑柱;5、零件筒;6、夹持装置;61、支撑板;62、驱动机构;621、固定架;622、电机;623、电动伸缩杆;624、连接架;625、滑动筒;626、第一连接块;627、第二连接块;628、转动板;63、限位机构;631、定位柱;632、定位筒;633、第一定位块;634、连接板;635、第二定位块;64、夹持板;65、支撑架;7、抛光装置;71、安装槽;72、抛光机构;721、第一定位板;722、马达;723、底座;724、第二定位板;725、螺纹杆;726、滑杆;727、移动块;728、限位架;73、打磨圈。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,图示中的一种精密机械零部件自动化加工设备,包括基板1、侧板2、三角板3、支撑柱4和零件筒5,所述基板1上表面固定安装有侧板2,所述侧板2与基板1通过三角板3固定连接,所述基板1下表面固定安装有支撑柱4,所述基板1上表面活动安装有零件筒5。
请参阅图1和图2,所述基板1上表面位于零件筒5的对应位置固定安装有夹持装置6,所述基板1下表面位于零件筒5的对应位置固定安装有抛光装置7,通过夹持装置6对零件筒5进行稳定夹持,实现了根据不同零件筒5内壁直径大小进行夹持,提高设备的通配性,便于使用者使用,通过抛光装置7的往复直线运动配合零件筒5的高速转动,保证对零件筒5表面打磨抛光的精细程度,提高使用者的使用便捷性。
请参阅图3,所述夹持装置6包括支撑板61、驱动机构62、限位机构63、夹持板64和支撑架65,所述基板1上表面固定安装有支撑板61,所述支撑板61上表面位于侧板2的对应位置固定安装有驱动机构62,所述所述驱动机构62输出端固定安装有限位机构63,所述限位机构63外壁等距安装有夹持板64,所述基板1上表面位于限位机构63的对应位置固定安装有支撑架65。
请参阅图3和图4,所述驱动机构62包括固定架621、电机622、电动伸缩杆623、连接架624、滑动筒625、第一连接块626、第二连接块627和转动板628,所述侧板2一侧固定安装有固定架621,所述固定架621内壁固定安装有电机622,所述电机622输出端转动安装有电动伸缩杆623,所述电动伸缩杆623输出端固定安装有连接架624,所述连接架624远离电动伸缩杆623的一端固定安装有滑动筒625,所述滑动筒625外壁等距安装有第一连接块626,所述第一连接块626内壁转动安装有转动板628,所述转动板628远离第一连接块626的一侧转动安装有第二连接块627,且连接块与夹持板64固定连接。
请参阅图4和图5,所述限位机构63包括定位柱631、定位筒632、第一定位块633、连接板634和第二定位块635,所述滑动筒625内壁滑动安装有定位柱631,且定位柱631与支撑架65固定连接,所述定位柱631外壁等距套设有定位筒632,所述定位筒632外壁等距安装有第一定位块633,所述第一定位块633内壁转动安装有连接板634,所述连接板634远离第一定位块633的一端转动安装有第二定位块635,且第二定位块635与夹持板64固定连接,通过将零件筒5内壁放置于夹持板64外壁,通过电动伸缩杆623驱动连接架624带动滑动筒625在定位柱631外壁进行滑动,通过滑动筒625带动第一连接块626带动转动板628进行转动,使第二连接块627带动夹持板64根据零件筒5内壁大小进行夹持,通过连接板634在第二定位块635与第一定位块633内壁进行转动,使第二定位块635带动夹持板64配合转动板628转动,使夹持板64对零件筒5内壁进行夹持,再通过电机622进行匀速转动。
请参阅图6和图7,所述抛光装置7包括安装槽71、抛光机构72和打磨圈73,所述基板1内壁位于零件筒5的对应位置开设有安装槽71,所述加班下表面固定安装有抛光机构72,所述抛光机构72上表面位于零件筒5的对应位置转动安装有打磨圈73。
请参阅图6和图7,所述抛光机构72包括第一定位板721、马达722、底座723、第二定位板724、螺纹杆725、滑杆726、移动块727和限位架728,所述基板1下表面位于安装槽71的对应位置固定安装有第一定位板721,所述第一定位板721内壁固定安装有马达722,所述马达722与基板1通过底座723固定连接,所述马达722输出端固定安装有螺纹杆725,所述基板1下表面位于螺纹杆725筛网对应位置固定安装有第二定位板724,所述第一定位板721内壁位于第二定位板724的对应位置固定安装有滑杆726,所述螺纹杆725外壁啮合安装有移动块727,所述移动块727上表面固定安装有限位架728,且限位架728内壁转动安装有打磨圈73,通过马达722带动螺纹杆725转动,使移动块727在螺纹杆725外壁进行转动,使移动块727配合滑杆726进行位置移动,带动打磨圈73在零件筒5外壁进行往复移动,实现打磨圈73对零件筒5外壁进行精细打磨。
本方案中,通过将零件筒5内壁放置于夹持板64外壁,通过电动伸缩杆623驱动连接架624带动滑动筒625在定位柱631外壁进行滑动,通过滑动筒625带动第一连接块626带动转动板628进行转动,使第二连接块627带动夹持板64根据零件筒5内壁大小进行夹持,通过连接板634在第二定位块635与第一定位块633内壁进行转动,使第二定位块635带动夹持板64配合转动板628转动,使夹持板64对零件筒5内壁进行夹持,再通过电机622进行匀速转动,通过马达722带动螺纹杆725转动,使移动块727在螺纹杆725外壁进行转动,使移动块727配合滑杆726进行位置移动,带动打磨圈73在零件筒5外壁进行往复移动,实现打磨圈73对零件筒5外壁进行精细打磨,此装置的设置通过夹持装置6对零件筒5进行稳定夹持,实现了根据不同零件筒5内壁直径大小进行夹持,提高设备的通配性,便于使用者使用,通过抛光装置7的往复直线运动配合零件筒5的高速转动,保证对零件筒5表面打磨抛光的精细程度,提高使用者的使用便捷性。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种精密机械零部件自动化加工设备
- 一种用于精密机械零部件自动化加工的焊接辅助装置